






论文作者:Lei Wan,Jianxin Zhao,Andreas Wiedholz,Manuel Bied,Mateus Martinez de Lucena,Abhishek Dinkar Jagtap,Andreas Festag,Antônio Augusto Fröhlich,Hannan Ejaz Keen,Alexey Vinel
作者单位:XITASO Gmbh;Karlsruhe Institute of Technology (KIT);Technische Hochschule Ingolstadt (THI);Federal ¨University of Santa Catarina (UFSC);Car2Car
论文链接:http://arxiv.org/abs/2504.04631v1
内容简介:
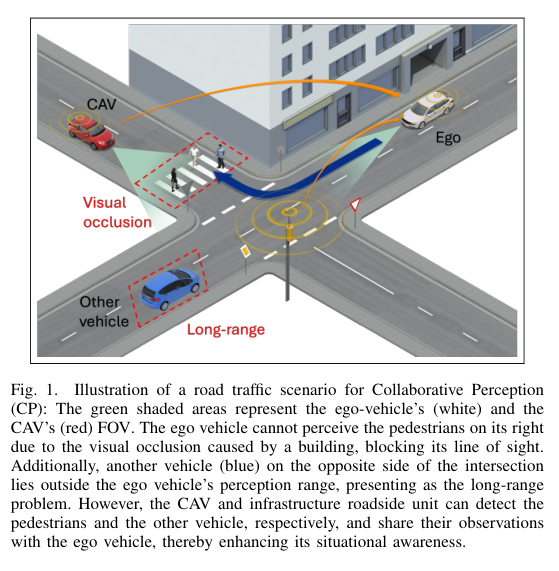
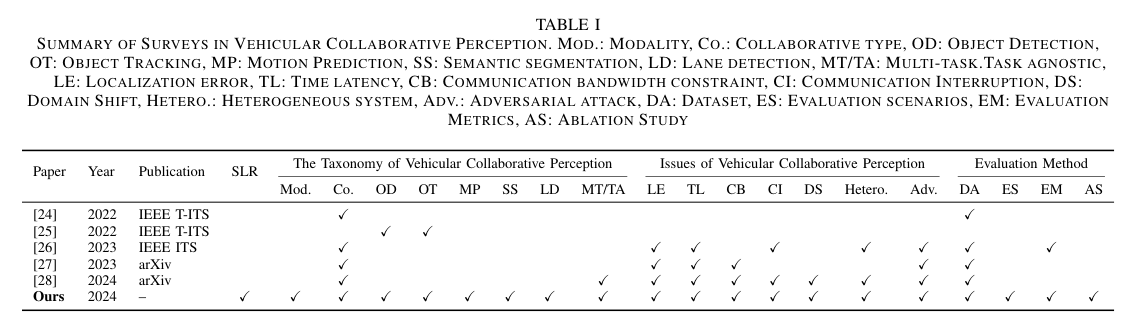
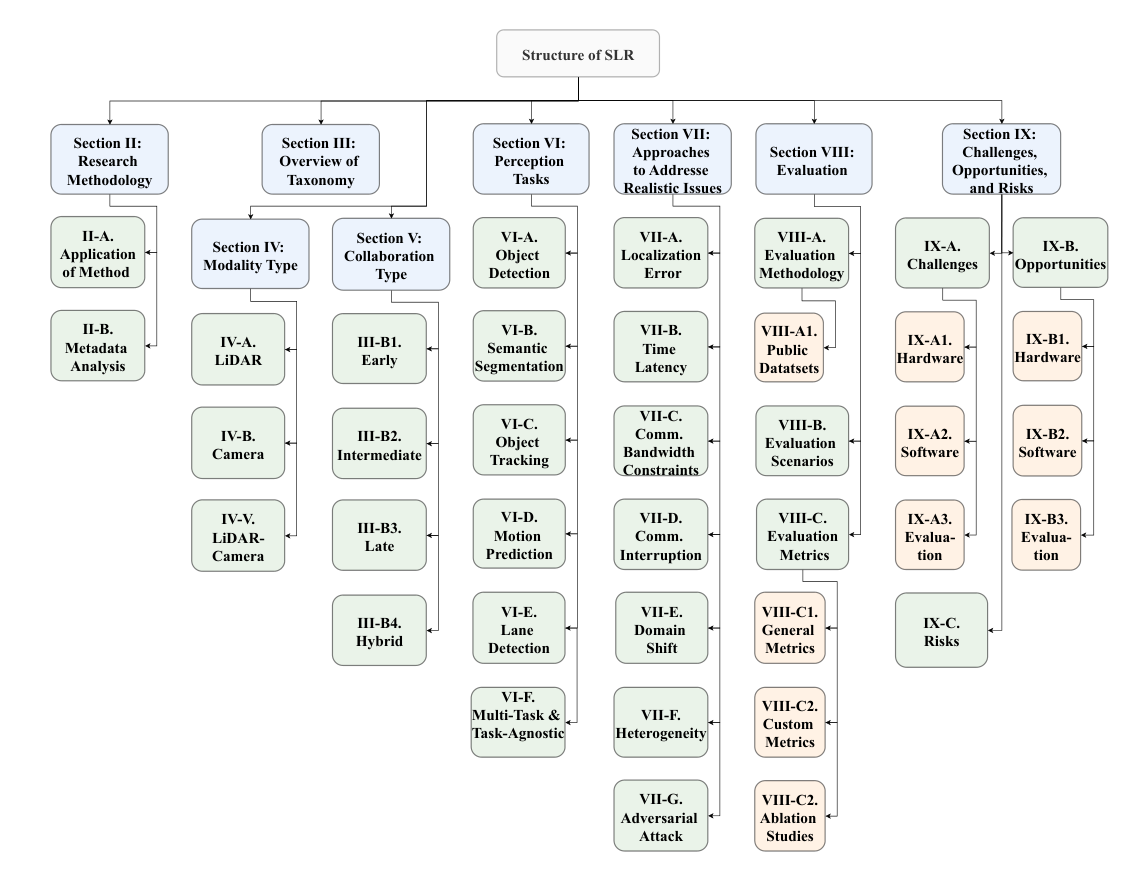
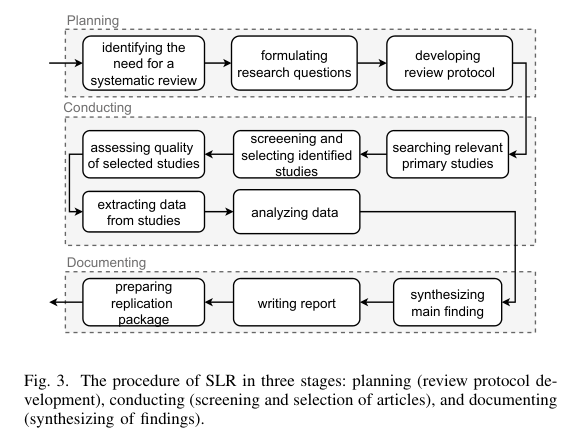
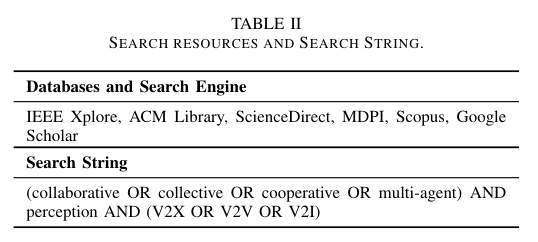
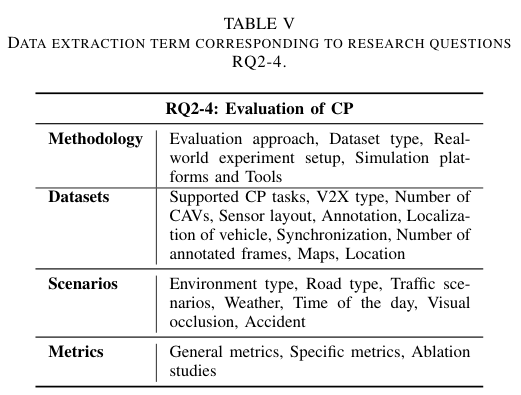
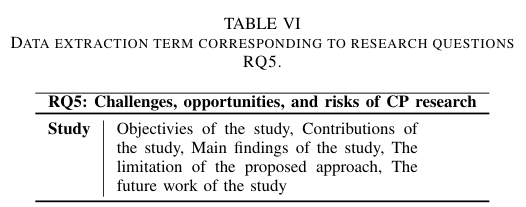
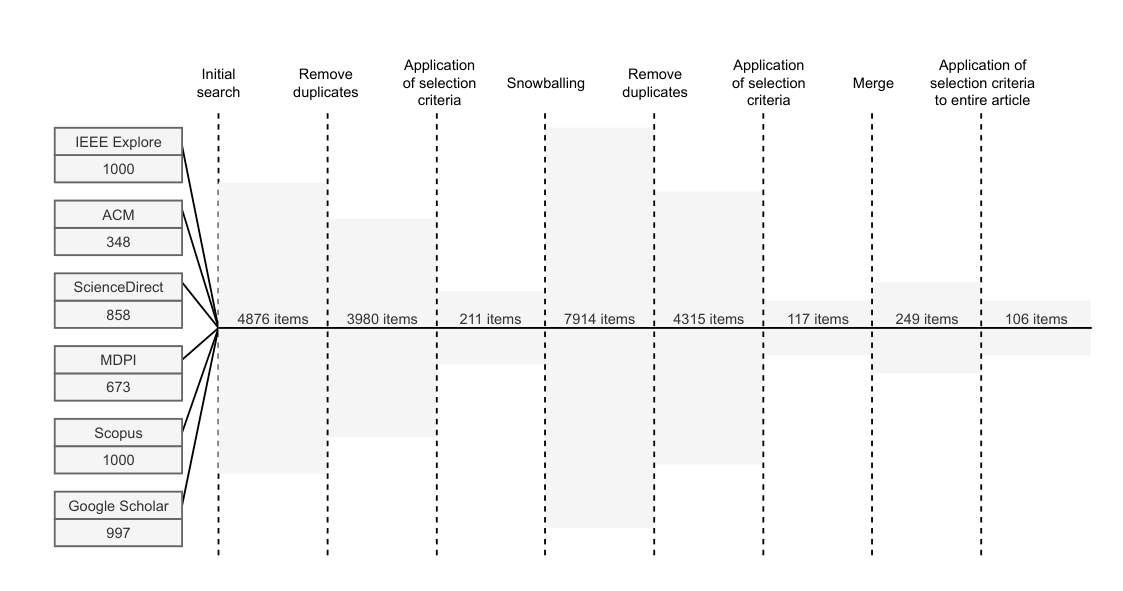
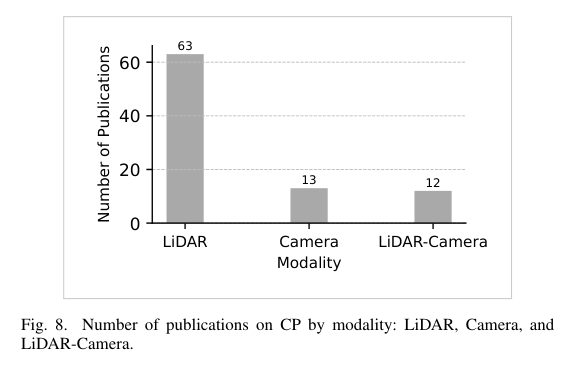
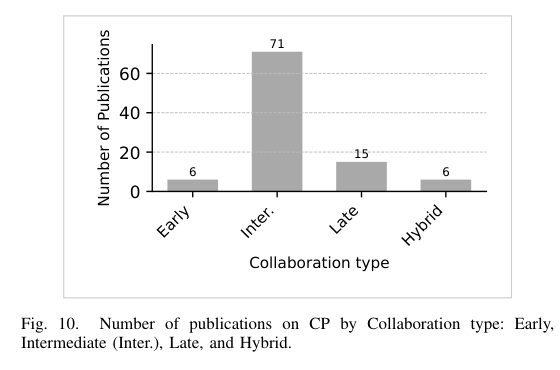
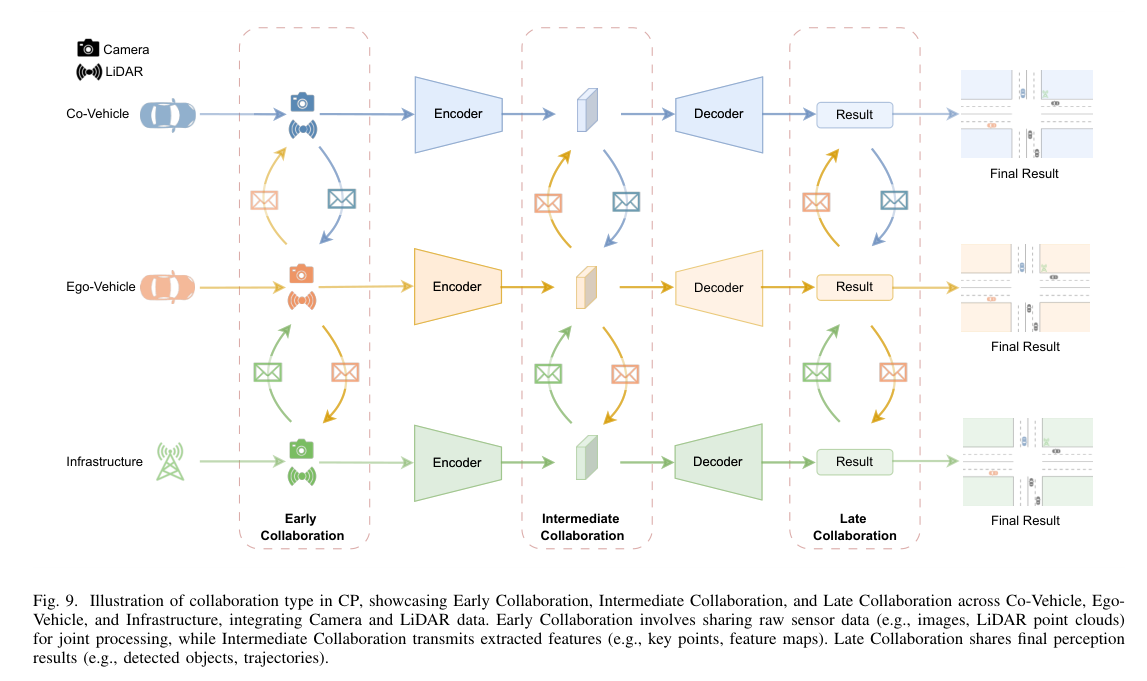
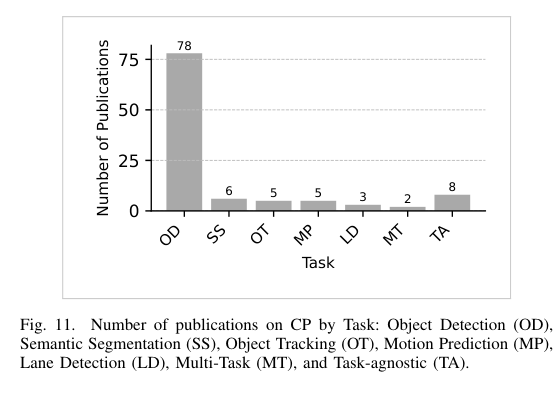
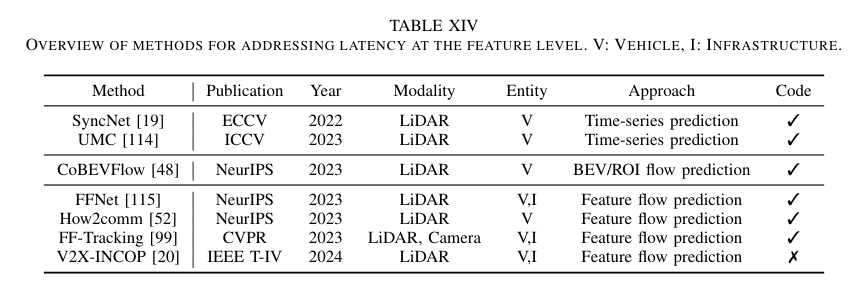
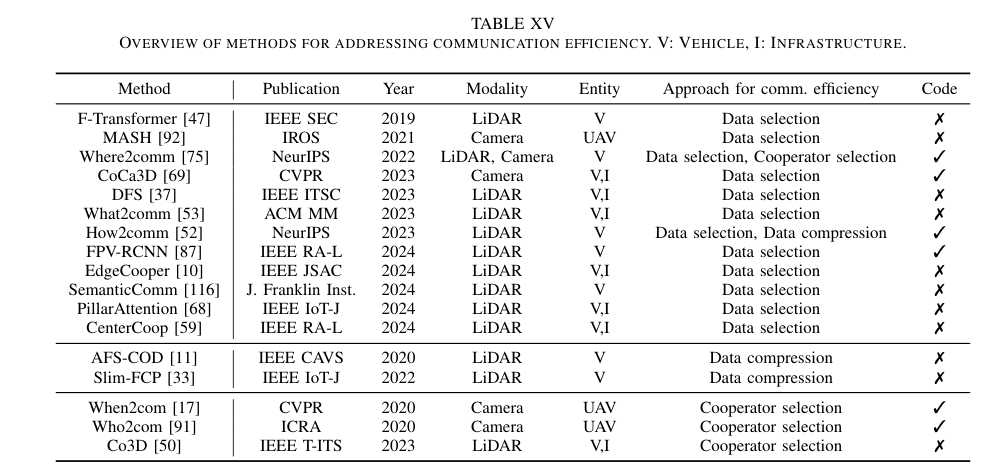
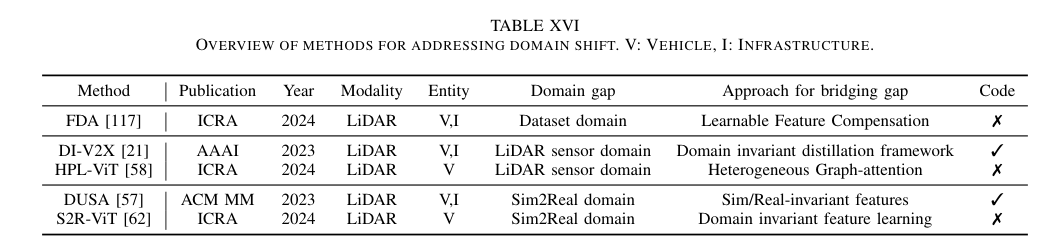
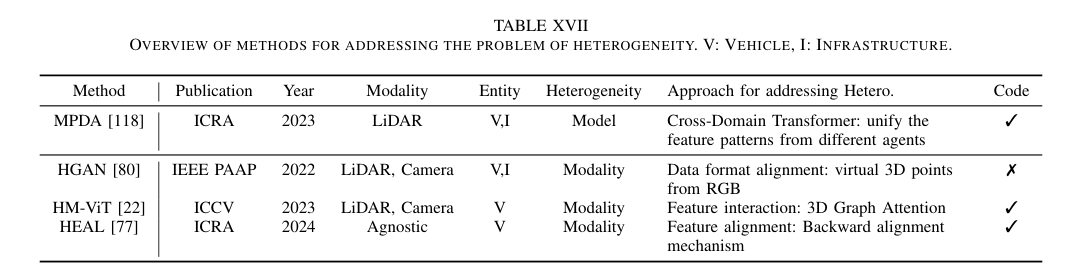
自动驾驶汽车的有效性依赖于可靠的感知能力。尽管人工智能与传感器融合技术取得了显著进展,当前单车感知系统仍面临诸多局限,特别是在视觉遮挡和远距离探测能力方面。协同感知(Collaborative Perception,简称CP),借助车联网(V2V,车对车通信;V2I,车对基础设施通信)技术,已成为缓解这些问题、提升自动驾驶系统可靠性的重要方向。除了通信技术的提升,计算机视觉领域也越来越关注通过协同方法改进车辆感知能力。然而,目前仍缺乏一份全面、系统、且能降低主观偏差的文献综述,这对于识别研究空白、总结研究趋势并指导未来方向具有重要意义。为此,本研究遵循PRISMA 2020指南,筛选并分析了106篇经过同行评审的论文。分析内容涵盖感知模态、协作方案以及关键感知任务。通过对比分析,综述展示了不同方法如何应对实际问题,如位姿误差、时间延迟、通信受限、领域差异、系统异质性及对抗性攻击。此外,本文还对现有评估方法进行了批判性审视,指出当前评估指标与协同感知的基本目标存在一定脱节。通过深入探讨各相关主题,本综述为协同感知领域的挑战、机遇与风险提供了宝贵的参考,有助于推动未来的研究发展。





















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











