






Carsim Simulink联合仿真-基于LQR/模糊PID/滑模控制的横摆稳定性控制 综合跟随理想横摆角速度的方法和抑制汽车质心侧偏角的汽车稳定性控制方法,以线性二自由度车辆操纵特性模型为控制目标,基于汽车横摆力矩与车辆状态偏差之间的动力学关系建立了控制模型。
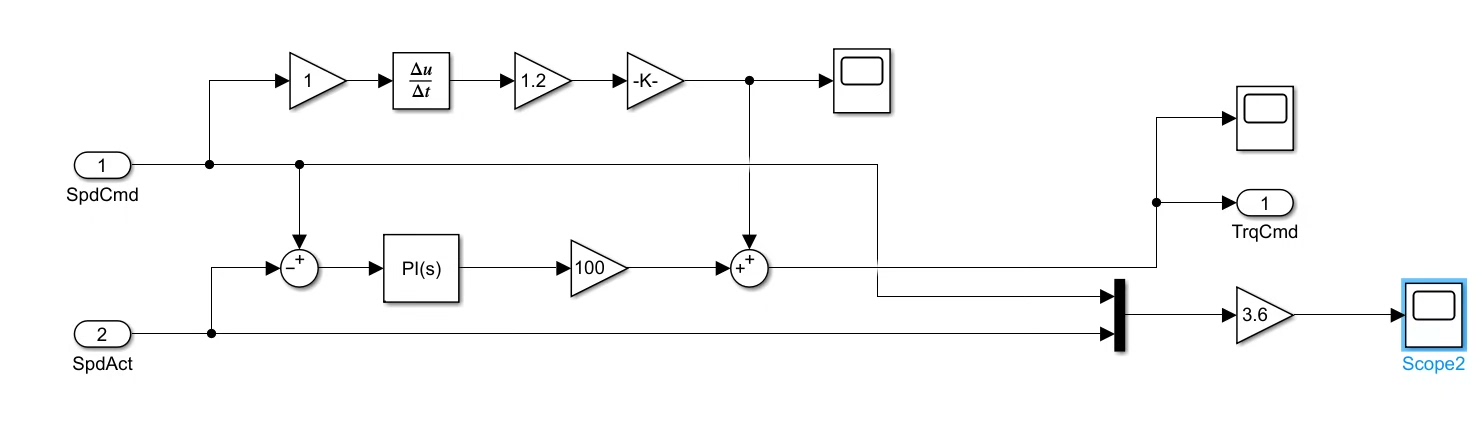
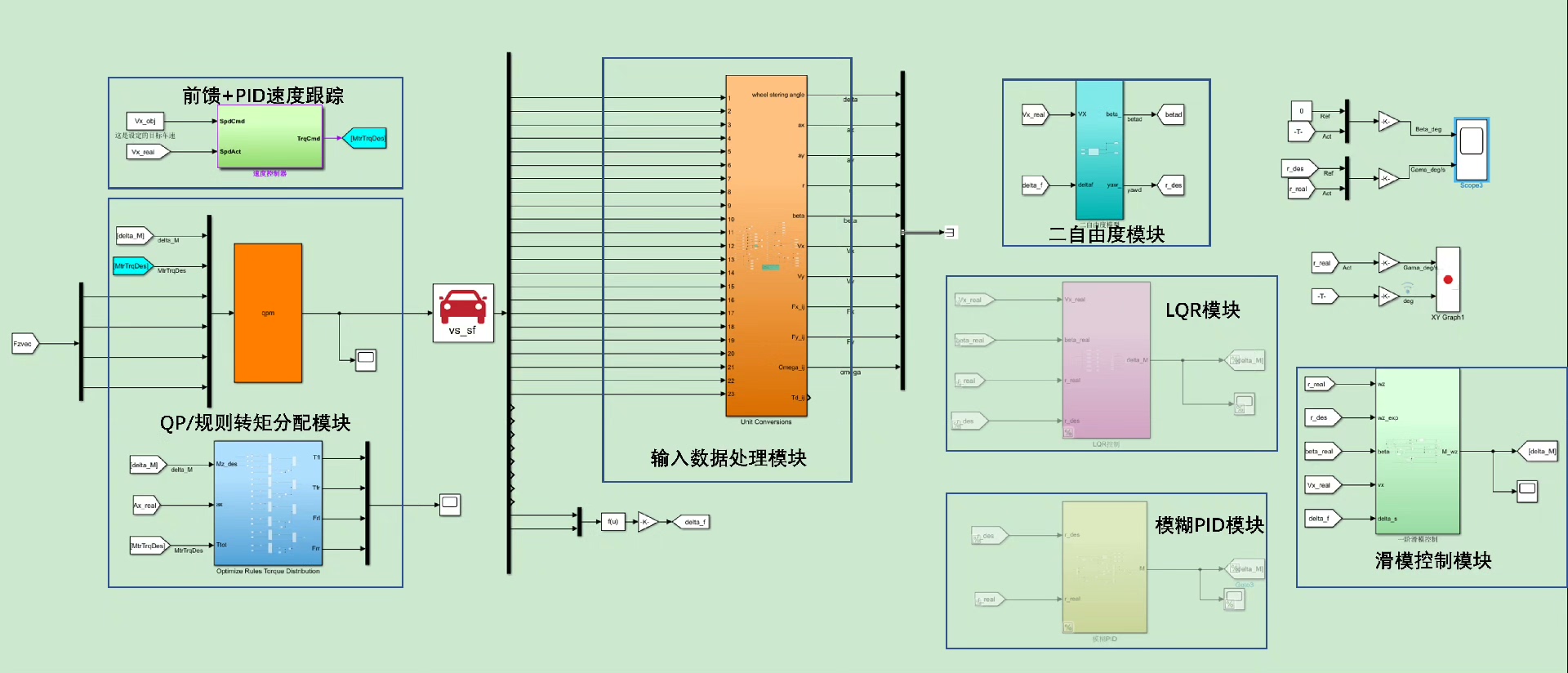
速度跟踪模块使用前馈加反馈的PID控制架构。
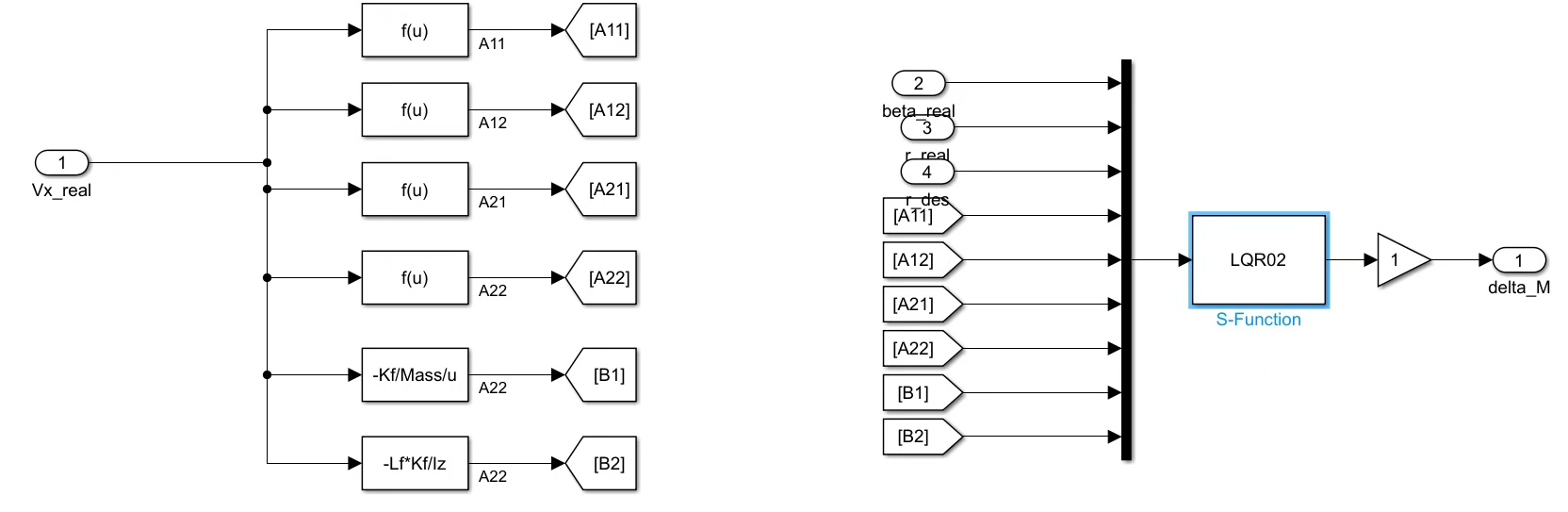
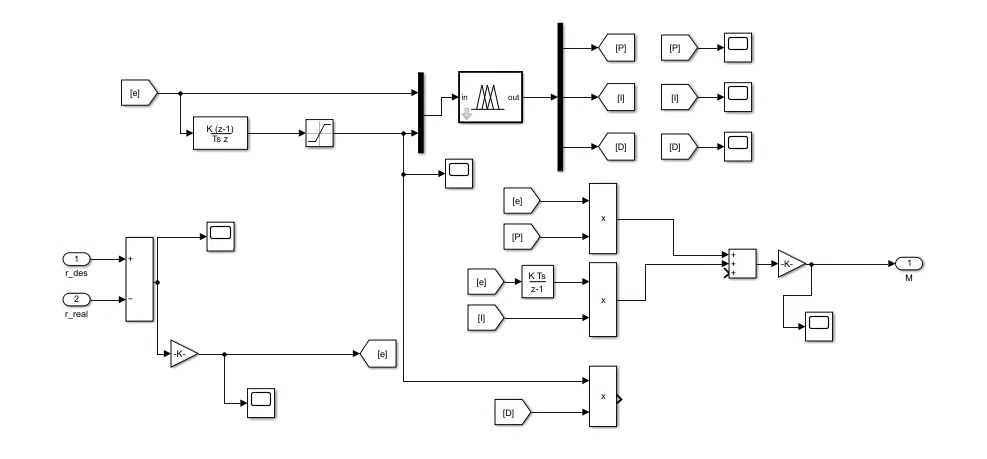
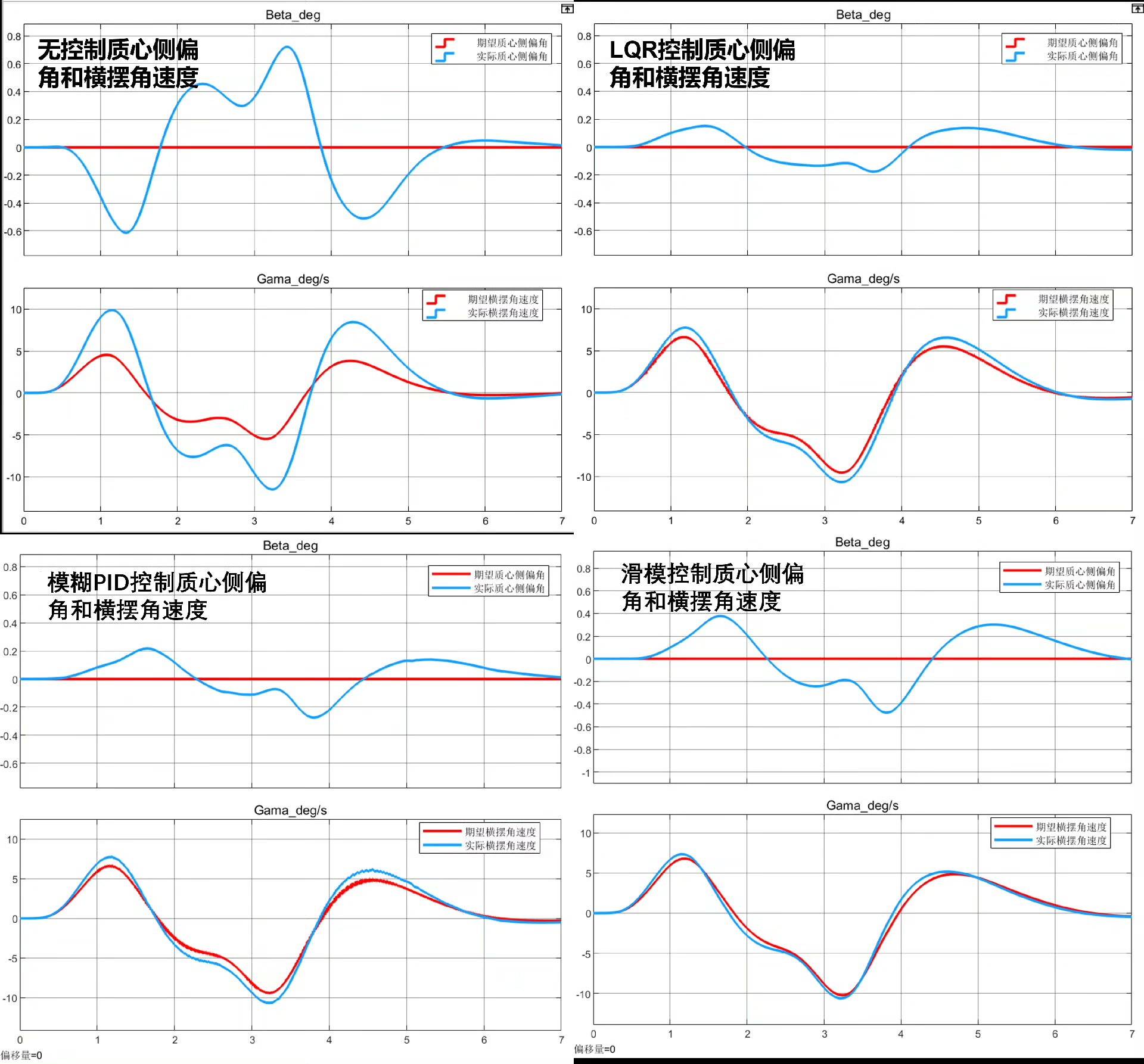
上层第一种方案采用线性二次型调节器(LQR)方法进行了汽车横摆力矩的决策,综合跟踪期望横摆角速度和抑制质心侧偏角;第二种方案采用模糊PID控制,以理想和实际横摆角速度的差值作为输入,输出附加横摆力矩;第三种方案采用滑模控制方法得到附加横摆力矩。
下层才用基于规则和基于二次规划的转矩分配方法对速度跟踪模块输出的需求总力矩和横摆力矩控制模块输出的横摆力矩进行分配,实现汽车稳定性控制。
文档详实,代码规范
YID:3348756745131243
泰若星刻苦的芥兰
技术博客文章:多层次横摆稳定性控制的设计与实现
摘要:
本文将探讨Carsim Simulink联合仿真在汽车横摆稳定性控制中的应用,通过LQR、模糊PID和滑模控制等多种方法,实现综合跟随理想横摆角速度和抑制汽车质心侧偏角的汽车稳定性控制。我们将以线性二自由度车辆操纵特性模型为控制目标,基于汽车横摆力矩与车辆状态偏差之间的动力学关系建立控制模型。
一、引言
随着汽车工业的快速发展,汽车的稳定性和操控性成为了研究的热点。横摆稳定性控制是提高汽车稳定性的重要手段之一。本文将介绍一种基于Carsim Simulink联合仿真的横摆稳定性控制,通过多种控制方法,实现综合控制汽车横摆角速度和质心侧偏角,以提高汽车的稳定性。
二、控制模型建立
本以线性二自由度车辆操纵特性模型为控制目标,基于汽车横摆力矩与车辆状态偏差之间的动力学关系建立控制模型。通过仿真Carsim和Simulink的联合仿真,可以更好地模拟汽车的实际运行情况,从而更准确地建立控制模型。
三、速度跟踪模块设计
速度跟踪模块采用前馈加反馈的PID控制架构。通过前馈控制,可以快速响应期望的横摆角速度,而反馈控制则可以弥补误差,提高的稳定性。
四、上层控制策略
上层控制策略包括三种方案:
- 线性二次型调节器(LQR)方法:该方法通过决策汽车横摆力矩,综合跟踪期望横摆角速度和抑制质心侧偏角。LQR方法具有较好的稳定性和响应速度。
- 模糊PID控制:该方法以理想和实际横摆角速度的差值作为输入,输出附加横摆力矩。模糊PID控制可以适应不同的工况,具有较好的鲁棒性。
- 滑模控制方法:该方法通过非线性控制算法得到附加横摆力矩,具有较好的跟踪性能和抗干扰能力。
五、下层转矩分配策略
下层转矩分配策略包括基于规则和基于二次规划的方法。根据上层控制策略输出的需求,通过转矩分配策略将需求分配给各个车轮,从而实现汽车的稳定性控制。
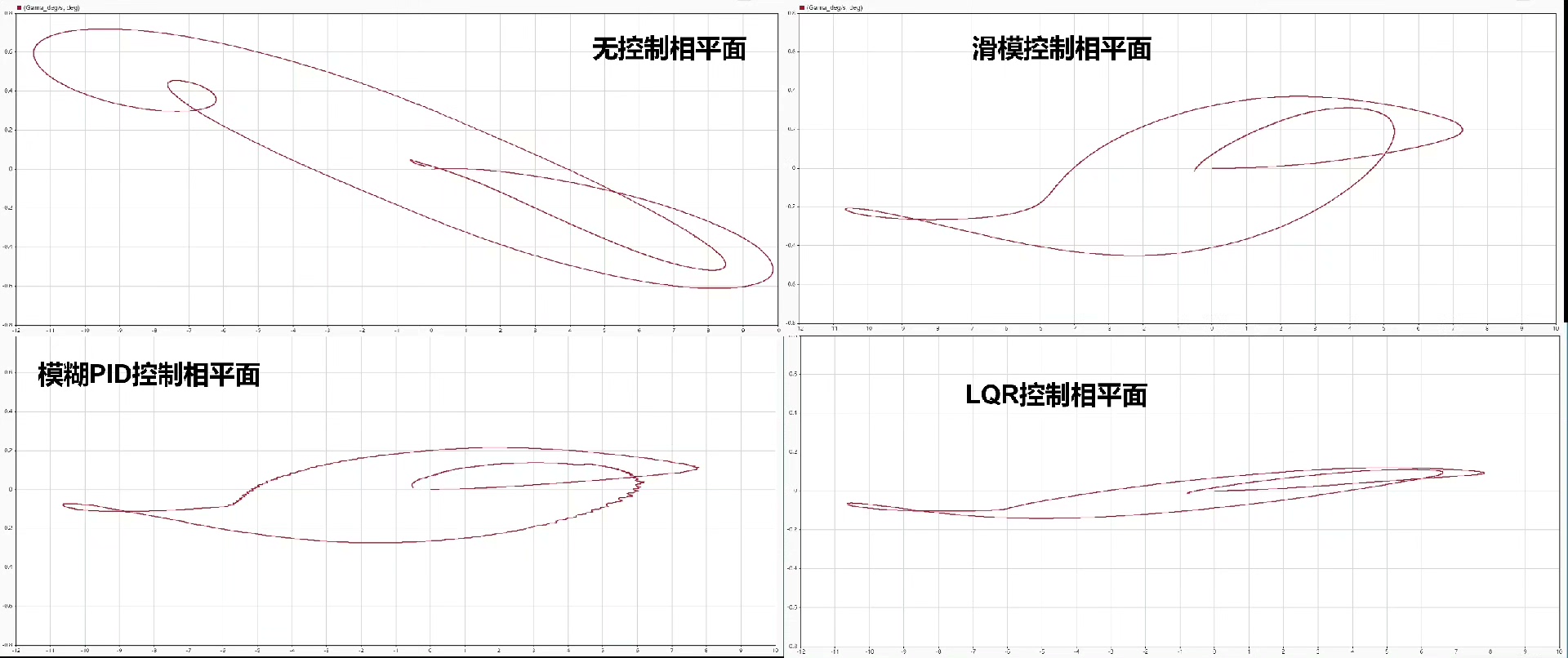
六、仿真实验与结果分析
通过Carsim Simulink联合仿真实验,我们可以对上述控制进行验证和分析。实验结果表明,本文所提出的横摆稳定性控制能够有效地跟随期望横摆角速度,并抑制质心侧偏角,提高汽车的稳定性。同时,不同控制策略的优缺点也得到了充分的体现。
七、结论
本文提出了一种基于Carsim Simulink联合仿真的多层次横摆稳定性控制,通过LQR、模糊PID和滑模控制等多种方法,实现综合跟随理想横摆角速度和抑制汽车质心侧偏角的汽车稳定性控制。实验结果表明,该具有较好的稳定性和响应速度,可以为汽车的稳定性和操控性提供重要的保障。
示例代码(以LQR方法为例):
// 定义状态和控制输入
double x[2] = {desired_yaw_rate, side_slip_angle}; // 状态,包括期望横摆角速度和质心侧偏角
double u[1] = {yaw_moment}; // 控制输入,即横摆力矩
// 定义矩阵A、B和控制矩阵Q、R等参数...(此处省略具体参数定义)
// ...(此处为LQR算法的实现过程)...
// 计算最优控制输入u_opt
u_opt = LQR_algorithm(A, B, Q, R); // 调用LQR算法计算最优解
// 根据u_opt计算附加横摆力矩并输出到下层转矩分配策略中...(此处省略具体实现)
点这了解更多: https://pan.baidu.com/s/1VmH8Cz0-lBQCz0jpuO0gxA?pwd=8let
















 1899
1899

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









