






 本文介绍了在RK3568平台上使用Ubuntu20.04进行CAN(ControllerAreaNetwork)协议的调试,包括驱动文件、DTS配置、硬件连接和波特率设置,以及收发测试的详细步骤。
本文介绍了在RK3568平台上使用Ubuntu20.04进行CAN(ControllerAreaNetwork)协议的调试,包括驱动文件、DTS配置、硬件连接和波特率设置,以及收发测试的详细步骤。
平台:RK3568 & Ubuntu20.04
内容:can口调试
一、CAN协议
CAN(Controller Area Network,控制器局域网)是一种能有效支持分布式控制和实时控制的串行通讯网络。
二、调试
1、驱动
can使用的驱动文件是 SDK\kernel\drivers\net\can\rockchip\rockchip_can.c
2、dts
&can0 {
assigned-clocks = <&cru CLK_CAN0>;
assigned-clock-rates = <100000000>;
pinctrl-names = "default";
pinctrl-0 = <&can0m0_pins>;
status = "okay";
};
can0: can@fe570000 {
compatible = "rockchip,can-1.0";
reg = <0x0 0xfe570000 0x0 0x1000>;
interrupts = <GIC_SPI 1 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&cru CLK_CAN0>, <&cru PCLK_CAN0>;
clock-names = "baudclk", "apb_pclk";
resets = <&cru SRST_CAN0>, <&cru SRST_P_CAN0>;
reset-names = "can", "can-apb";
tx-fifo-depth = <1>;
rx-fifo-depth = <6>;
status = "disabled";
};assigned-clock-rates给了100M,can的波特率不超过3M的话给这么多就好了,超过的话给200M。
pinctrl-0的话也需要对一下原理图和rk3568-pinctrl.dtsi
![]()
can0 {
/omit-if-no-ref/
can0m0_pins: can0m0-pins {
rockchip,pins =
/* can0_rxm0 */
<0 RK_PB4 2 &pcfg_pull_none>,
/* can0_txm0 */
<0 RK_PB3 2 &pcfg_pull_none>;
};
/omit-if-no-ref/
can0m1_pins: can0m1-pins {
rockchip,pins =
/* can0_rxm1 */
<2 RK_PA2 4 &pcfg_pull_none>,
/* can0_txm1 */
<2 RK_PA1 4 &pcfg_pull_none>;
};
};例如这里,原理图用的是GPIIO0_B3和B4,对应rk3568-pinctrl.dtsi的can0m0_pins,所以&can0里面的pinctrl-0对应使用can0m0_pins。
三、硬件
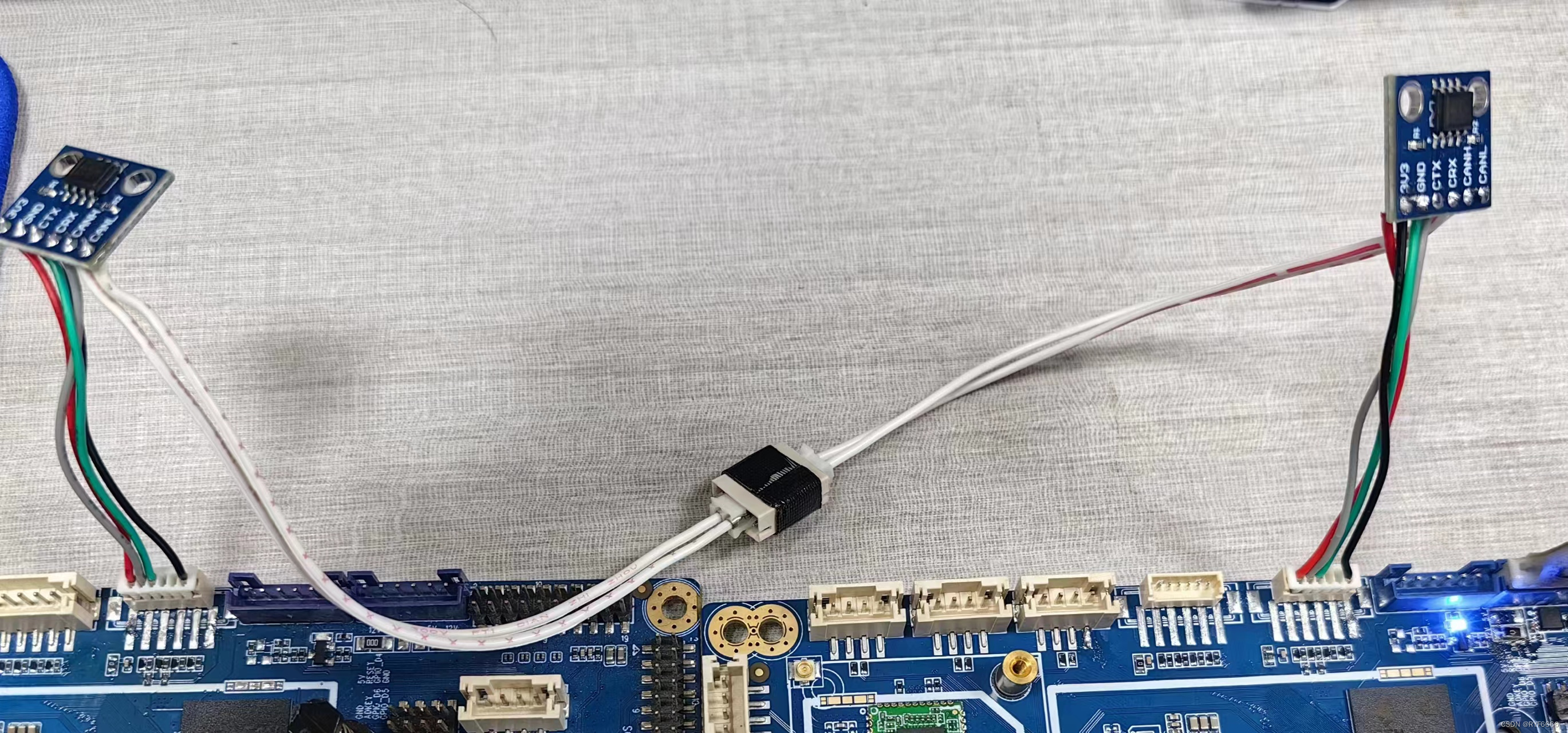
这里使用的是两块主板通过can进行通信,模块用的是这个
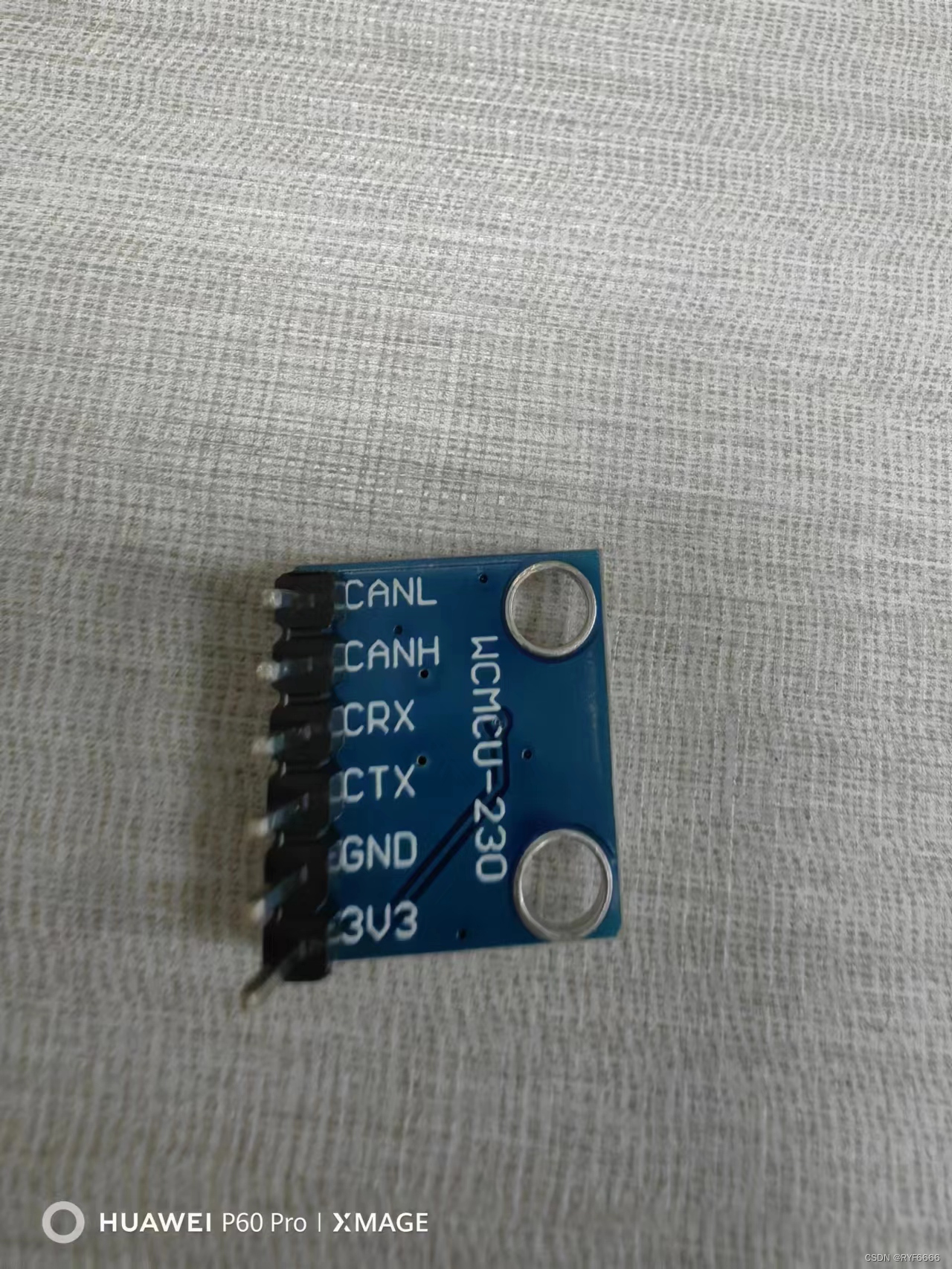
3.3V供电的,把供电、接地、TX、RX对应接到主板的接口;再把两个模块CANH和CANL接起来,H对H,L对L。
三、测试
首先 ifconfig -a 是可以看到can0节点的,但是没有处于运行状态
root@linaro:~# ifconfig -a
can0: flags=128<NOARP> mtu 16
unspec 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00 txqueuelen 10 (UNSPEC)
RX packets 0 bytes 0 (0.0 B)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 0 bytes 0 (0.0 B)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
device interrupt 56 1、配置can
关闭can0
ip link set can0 down设置波特率
ip link set can0 type can bitrate 100000开启can0
ip link set can0 up调试为了偷个懒,直接输入
ip link set can0 down && ip link set can0 type can bitrate 100000 && ip link set can0 up再次运行ifconfig -a,可以看到can0 running了
root@linaro:~# ifconfig -a
can0: flags=193<UP,RUNNING,NOARP> mtu 16
unspec 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00 txqueuelen 10 (UNSPEC)
RX packets 0 bytes 0 (0.0 B)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 0 bytes 0 (0.0 B)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
device interrupt 56 2、收发测试
两个平台均使用上述命令配置好can以后,开始进行收发测试:
发送命令:
cansend can0 123#1122334455667788接受命令:
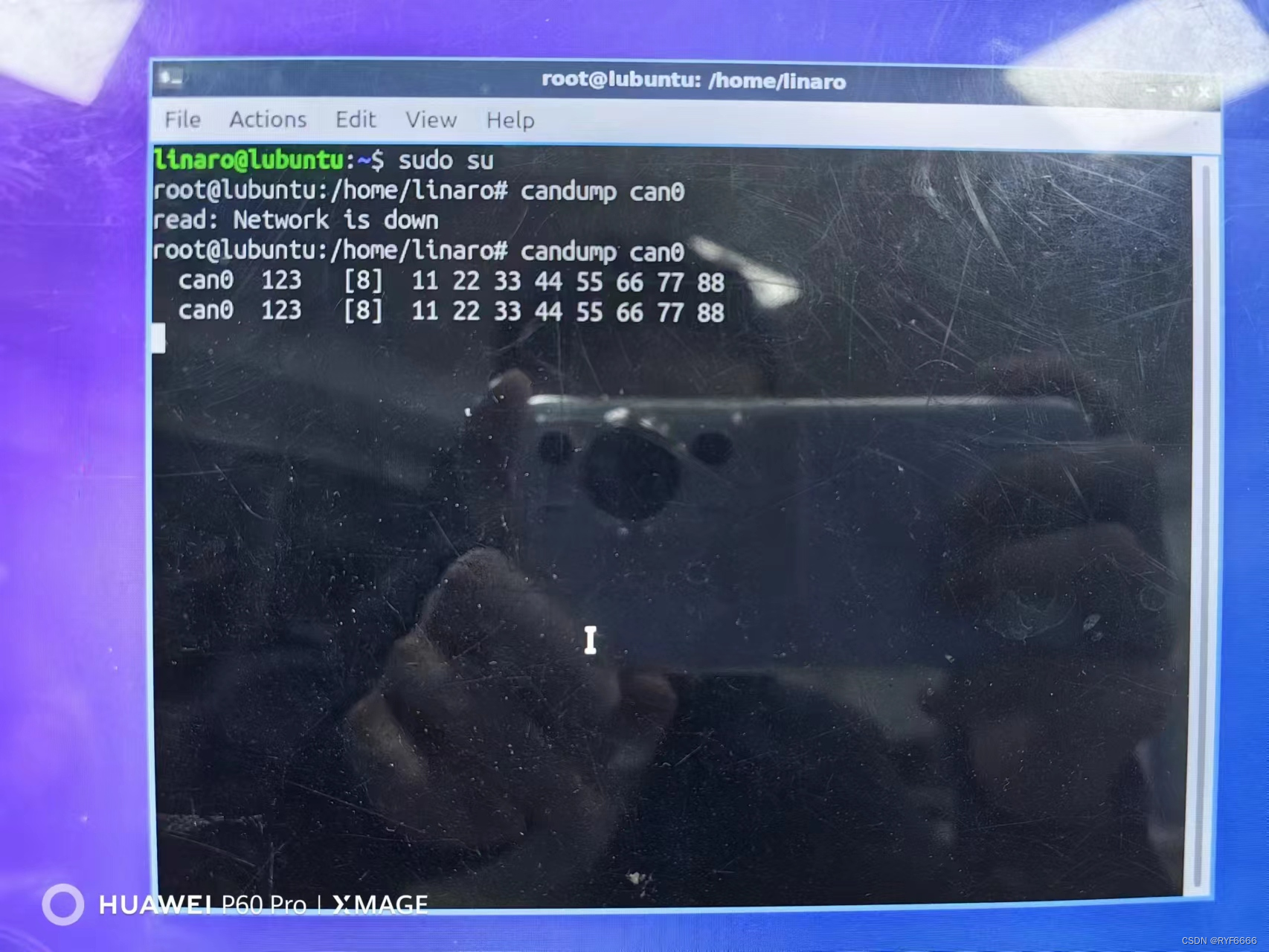
candump can0一个平台收,一个发。例如这里发送的平台可以看到成功发送两个packets
root@linaro:~# ifconfig -a
can0: flags=193<UP,RUNNING,NOARP> mtu 16
unspec 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00 txqueuelen 10 (UNSPEC)
RX packets 0 bytes 0 (0.0 B)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 2 bytes 16 (16.0 B)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
device interrupt 56 而接收端可以看到收到的数据,发送者的ID等等信息


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









