










引言
系统创建多进程的目的就是让子进程能够帮助父进程完成更多事情,那通过上一篇笔记fork函数创建的子进程都拥有与父进程相同的程序,但是我们的目的是要让子进程完成一些其他事情,那么这篇笔记主要就是记录操作子进程运行其他代码的API。
exec组函数
| head | 详细 |
|---|---|
| 功能 | 在进程中加载新的程序文件或者脚本,覆盖原有代码,重新运行 |
| 头文件 | #include<unistd.h> |
| 原型 | int execl(const char *path,const char *arg,…) |
| 原型 | int execv(const char *path,const char *argv[]) |
| 原型 | int execle(const char *path,const char *arg,…,char *const envp[]) |
| 原型 | int execlp(const char *file,const char *arg,…) |
| 原型 | int execvp(const char *file,char *const argv[]) |
| 原型 | int execvpe(const char *file,char *const argv[],char *const envp[]) |
| 参数 | path:即将被加载执行的ELF文件或者脚本的路径 |
| 参数 | file:即将被加载执行的ELF文件或者脚本的名字 |
| 参数 | arg:以列表方式罗列的ELF文件或者脚本的参数 |
| 参数 | argv:以数组方式组织的ELF文件或者脚本的参数 |
| 参数 | envp:用户自定义的环境变量数组 |
| 返回值 | 成功:不返回 |
| 返回值 | 失败:-1 |
运行原理:

execl代码实现:


当我们子进程需要运行的代码为大量代码的时候,就应该使用这种函数来覆盖原来的代码
运行结果:

wait函数与waitpid函数
| head | 详细 |
|---|---|
| 功能 | 等待子进程 |
| 头文件 | #include<>sys/wait.h |
| 原型 | pid_t wait(int *stat_loc) |
| 原型 | pid_t waitpid(pid_t pid,int *stat_loc,int options) |
| 参数 | pid:小于-1:等待组ID的绝对值为pid的进程组中的任一子进程 |
| 参数 | pid:-1:等待任一子进程 |
| 参数 | pid:0:等待调用者所在的进程组中的任一子进程 |
| 参数 | pid:大于0:等待进程组ID为Pid的子进程 |
| 参数 | stat_loc:子进程退出状态 |
| 参数 | option:WCONTINUED:报告任一从暂停态出来且从未报告过的子进程状态 |
| 参数 | option:WNOHANG:非阻塞等待 |
| 参数 | option:WUNTRACED:报告任一当前处于暂停态且从未报告过的子进程状态 |
| 返回值 | Wait():成功:退出的子进程PID。失败:-1 |
| 返回值 | Waitpid():成功:状态发生改变的子进程PID。失败:-1 |
代码实现:父进程:

子进程:

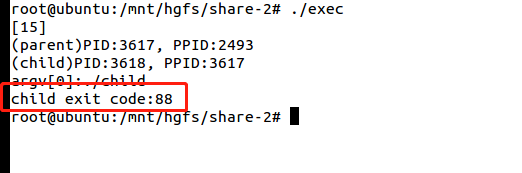
运行结果:

但是奇怪的是,父进程并不是输出88而是22528
那么原因就是:
- 退出状态中:退出值只是一部分,那么其实前面还有很大的一部分在记录其它信息:例如异常信号等
那么代码应该使用以下的宏来处理:

那么父进程运行的代码:

运行结果:















 467
467











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









