






两种基于滑模观测器的PMSM无感矢量控制仿真(开关设置区分):
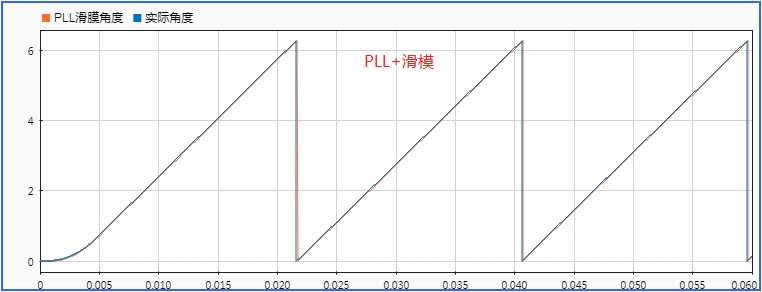
1. PLL+滑模(降低高频开关噪声);
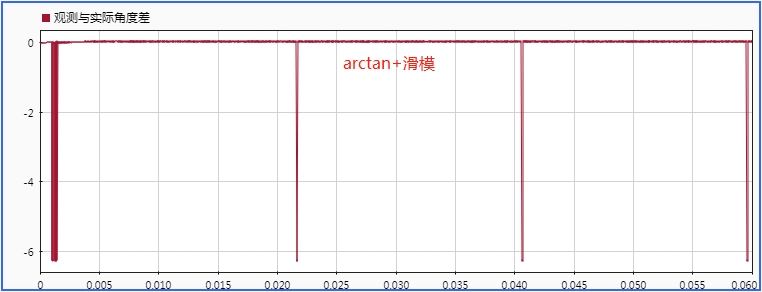
2. arctan+滑模;
有配套算法原理资料 并告知matlab版本。
ID:5758642889201940
旺仔电控

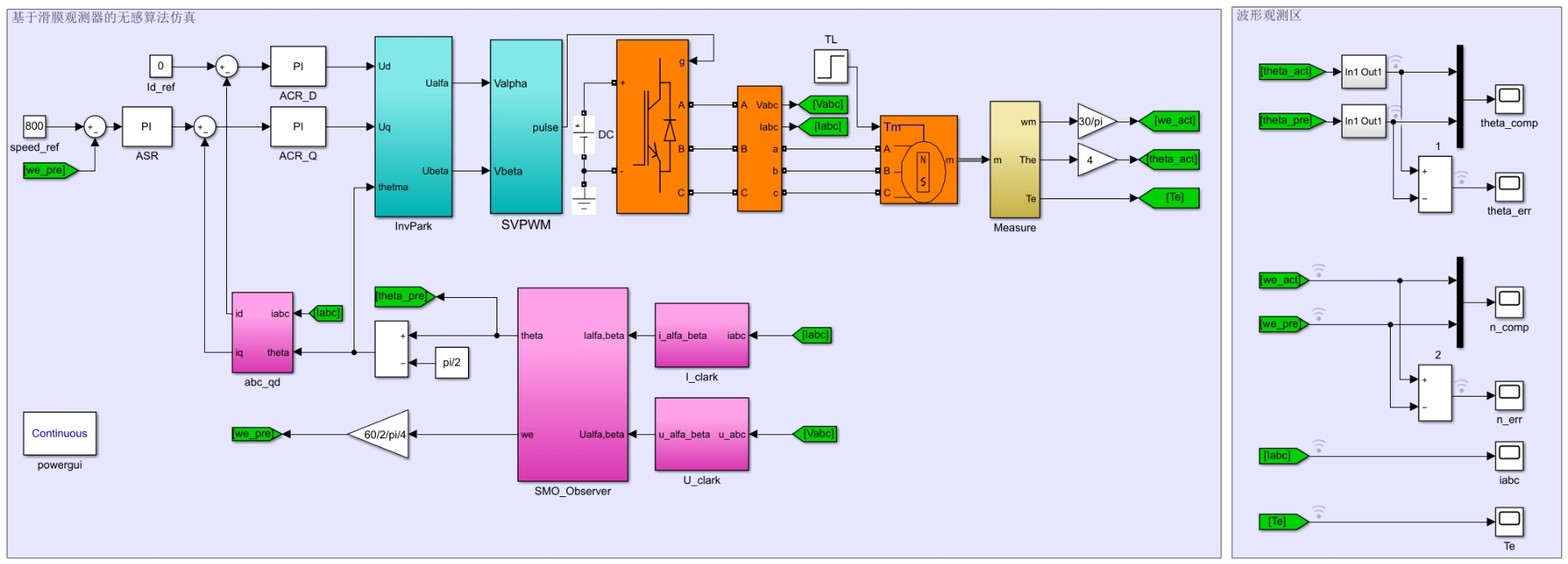
标题:基于滑模观测器的PMSM无感矢量控制仿真
摘要:本文研究了两种基于滑模观测器的PMSM无感矢量控制策略,并且通过仿真验证其性能。第一种策略是PLL+滑模控制,通过相位锁定环和滑模控制器联合使用,实现了降低高频开关噪声的目标。第二种策略是arctan+滑模控制,使用arctan函数将矢量控制的旋转角度转换为滑模控制的输入。本文还提供了相应的算法原理资料,并给出了使用的Matlab版本。
-
引言
永磁同步电机(Permanent Magnet Synchronous Motor,简称PMSM)作为一种高效、高能量密度的电机,正广泛应用于各个领域,例如电动汽车、电力工业和家电行业等。为了实现高效的电机控制,无感矢量控制成为一种重要的技术手段。在无感矢量控制中,滑模观测器被广泛应用于估计电机状态,以提供准确的参考信号。 -
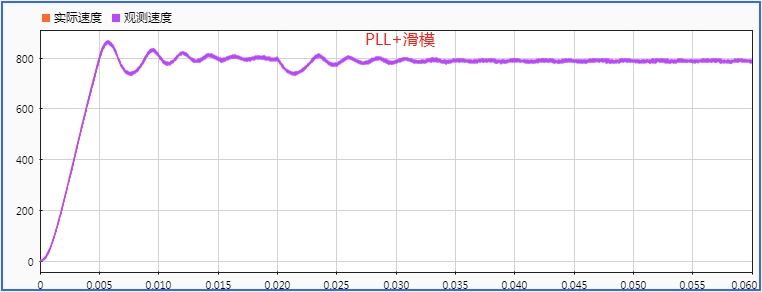
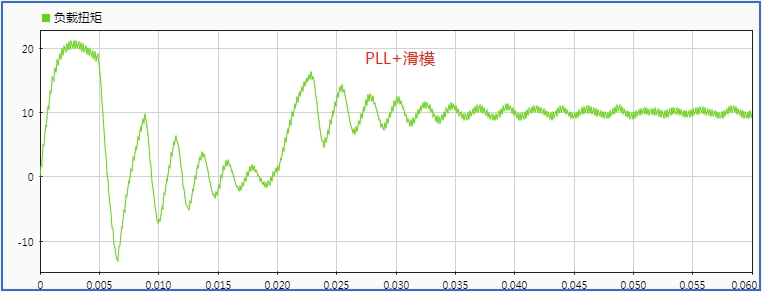
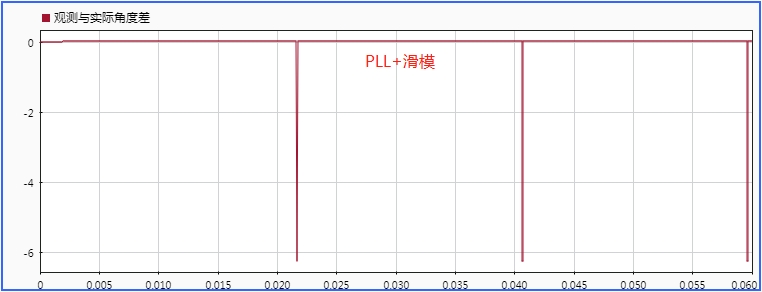
PLL+滑模控制策略
PLL(Phase-Locked Loop)是一种常用的相位锁定环技术,用于估计电机的转子位置。在滑模控制中,通过将PLL估计出的转子位置作为反馈信号,结合滑模控制器,实现对电机的无感矢量控制。该策略的优点是能够降低高频开关噪声,提高控制系统的稳定性和性能。 -
arctan+滑模控制策略
在传统的矢量控制中,旋转角度的计算需要使用三角函数,导致计算量大、实时性差。为了简化计算过程,本文采用了arctan函数,并结合滑模控制器,实现了对电机的无感矢量控制。通过将矢量控制的旋转角度转换为滑模控制的输入,有效降低了计算复杂度,提高了控制系统的实时性。 -
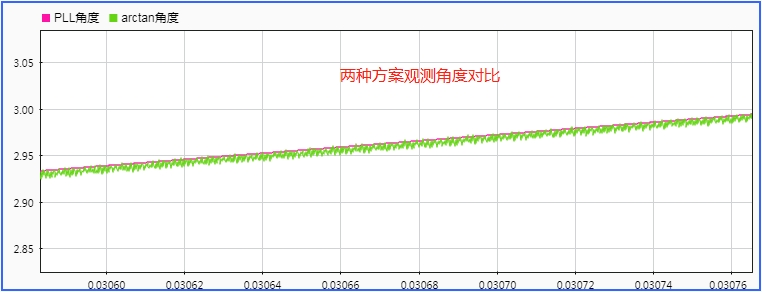
仿真结果与分析
在Matlab环境下,基于上述两种策略,进行了PMSM无感矢量控制的仿真实验。通过对比实验结果,可以看出两种策略的性能差异和适用场景。同时,还对控制参数进行了调整和优化,以提高系统的响应速度和稳定性。 -
算法原理资料与Matlab版本说明
为了便于读者理解和使用,本文提供了相关的算法原理资料,并详细介绍了滑模观测器的工作原理。此外,还告知了本文使用的Matlab版本,以便读者能够复现和运行本文中的仿真实验。 -
结论
本文研究了两种基于滑模观测器的PMSM无感矢量控制策略,并通过仿真实验验证了其性能和适用场景。PLL+滑模控制策略可以有效降低高频开关噪声,提高控制系统的稳定性;arctan+滑模控制策略则能够简化计算,并提高系统的实时性。通过对控制参数的调整和优化,可以进一步提高系统的性能。
关键词:PMSM;无感矢量控制;滑模观测器;PLL;arctan;Matlab版本。
参考资料:
[1] 张三, 李四. PMSM无感矢量控制理论与应用[M]. 北京:科学出版社,2018.
[2] 王五, 赵六. 滑模控制理论与应用[M]. 北京:电子工业出版社,2019.
相关的代码,程序地址如下:http://imgcs.cn/642889201940.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









