







写在前面
【三年面试五年模拟】旨在挖掘&沉淀AI算法工程师在实习/校招/社招时所需的干货知识点与面试方法,力求让读者在获得心仪offer的同时,持续增强技术基本面。
欢迎大家关注Rocky的公众号:WeThinkIn
欢迎大家关注Rocky的知乎:Rocky Ding
AIGC算法工程师面试面经秘籍分享:WeThinkIn/Interview-for-Algorithm-Engineer欢迎大家Star~
获取更多AI行业的前沿资讯与干货资源
AIGC时代的 《三年面试五年模拟》AI算法工程师求职面试秘籍独家资源: 【三年面试五年模拟】AI算法工程师面试秘籍
Rocky最新撰写10万字Stable Diffusion 3和FLUX.1系列模型的深入浅出全维度解析文章: 深入浅出完整解析Stable Diffusion 3(SD 3)和FLUX.1系列核心基础知识
大家好,我是Rocky。
又到了定期学习《三年面试五年模拟》文章的时候了!本周期我们持续更新了丰富的AIGC面试高频问答,依旧干货满满!诚意满满!
Rocky创办的《三年面试五年模拟》项目在持续帮助很多读者获得了心仪的AIGC科技公司和互联网大厂的算法岗offer,收到了大家非常多的好评,Rocky觉得很开心也很有意义!
现在时间来到2025年,随着DeepSeek的横空出世,AIGC时代的科技浪潮破纪录达到了新高峰,AI行业对AIGC技术人才的需求也日益旺盛。
**为了帮助大家在2025年的实习、秋招、春招以及社招求职时更加从容和有所依靠,Rocky将《三年面试五年模拟》项目进行重大战略架构升级,并承诺《三年面试五年模拟》项目将陪伴大家和码二代们的整个职业生涯,为大家在AI行业中的求职招聘保驾护航!**详细内容大家可以阅读:
Rocky已经将《三年面试五年模拟》项目的完整版构建在Github上:https://github.com/WeThinkIn/Interview-for-Algorithm-Engineer/tree/main,本周期更新的AIGC面试高频问答已经全部同步更新到项目中了,欢迎大家star!
本文是《三年面试五年模拟》项目的第三十三式,考虑到易读性与文章篇幅,Rocky本次只从Github完整版项目中摘选了2025年3月17号-2025年4月6号更新的部分高频&干货面试知识点,并配以相应的参考答案(精简版),供大家学习探讨。点赞本文,并star咱们的Github项目,你就收获了半个offer!再转发本文,你就收获了0.75个offer!
So,enjoy(与本文的BGM一起食用更佳哦):
正文开始
目录先行
AI行业招聘信息汇总
- 转转集团2025校招开启:https://zhuanzhuan.zhiye.com/campus/jobs
- 地平线2025年春季实习招聘开启:https://horizon-campus.hotjob.cn/
- 小米集团2025年春招&转正实习开启:https://hr.xiaomi.com/campus
- 联想2025春季校园招聘开启:https://talent.lenovo.com.cn/position?projectType=1
- 搜狐畅游25届春招补招及26届暑期实习开启:https://campus.changyou.com/
- 完美世界25春招&26实习热招中:https://jobs.games.wanmei.com/school_qa.html
- 龙湖2025年仕官生&仕习生春招开启:https://2024.yingjiesheng.com/longfor/PC/sgs.html
- 腾讯光子工作室招实习开启:https://guangzi.qq.com/web20220530/join.html
- 工银科技2025年度春季校园招聘开启:https://job.icbc.com.cn/pc/index.html#/main/school/home/post
- 钉钉2025年春季实习生招聘开启:https://talent.dingtalk.com/campus/home?lang=zh
- 360集团2025春季校招补录开启:https://360campus.zhiye.com/jobs
AI绘画基础:
-
Flow Matching和DDPM之间有什么区别?
-
什么是人脸关键点识别任务?
AI视频基础:
-
Wan2.1视频大模型的Text Encoder模型架构是什么样的?
-
介绍一下AI视频领域的视频帧数、视频帧率、视频分辨率、视频码率的概念
深度学习基础:
-
全连接层有哪些主流变体?
-
稠密网络和稀疏网络有什么异同?
机器学习基础:
-
介绍一下机器学习中的Dice Loss损失函数
-
什么是机器学习中的AUC和ROC的概念?
Python编程基础:
-
Python中处理GLB文件的操作大全
-
Python中处理OBJ文件的操作大全
模型部署基础:
-
什么是Zigzag(锯齿形或之字形)顺序模式?
-
介绍一下NVLink的概念
计算机基础:
-
什么是RAM?
-
计算机的内存和RAM是一个概念吗?详细介绍内存各种类型的作用
开放性问题:
-
在AIGC时代,如何随着时代发展持续沉淀AIGC核心价值?
-
在AIGC时代,算法工程师如何跟随着时代发展持续沉淀AIGC跨周期的核心价值?
AI行业招聘信息汇总
AI绘画基础
【一】Flow Matching和DDPM之间有什么区别?
Flow Matching和去噪扩散概率模型(DDPM)都是生成模型,但它们在理论基础、训练目标和生成过程上都有显著区别。
核心区别:
DDPM通过随机扩散和去噪过程生成数据,强调概率建模;Flow Matching通过确定性ODE路径直接匹配目标分布,追求高效的最优传输。前者生成质量高但速度慢,后者在速度上更具优势,同时理论更简洁。
1. 理论基础
-
DDPM:
- 基于扩散过程,属于概率模型,通过马尔可夫链的前向(加噪)和反向(去噪)过程建模。
- 前向过程逐步添加高斯噪声,将数据转化为纯噪声;反向过程通过神经网络学习逐步去噪。
- 数学上对应 随机微分方程(SDE) 的离散化。
-
Flow Matching:
- 基于 连续归一化流(CNF) 或 最优传输(Optimal Transport, OT) ,通过常微分方程(ODE)定义确定性路径。
- 目标是从噪声分布到数据分布构建一条平滑的概率路径,通常通过匹配向量场实现。
- 数学上对应 确定性ODE ,强调路径的直线性或最优性。
2. 过程类型
-
DDPM:
- 随机过程:每一步添加或去除的噪声是随机的高斯噪声。
- 前向和反向过程均为马尔可夫链,依赖多步迭代。
-
Flow Matching:
- 确定性过程:生成路径由ODE定义,通常为确定性映射(如Rectified Flow)。
- 可能通过最优传输直接规划最小能量路径,减少随机性。
3. 训练目标
-
DDPM:
- 优化变分下界(ELBO),简化为预测每一步的噪声(均方误差损失)。
- 需要模拟所有时间步的噪声扰动,训练复杂但稳定。
-
Flow Matching:
- 直接匹配条件概率路径或向量场(如条件流匹配,CFM)。
- 损失函数设计为最小化预测路径与目标路径的差异(如Wasserstein距离),训练更高效。
4. 采样过程
-
DDPM:
- 多步迭代采样:通常需要几十到几百步去噪,速度较慢。
- 依赖设计的噪声调度(Noise Schedule)控制加噪/去噪速度。
-
Flow Matching:
- 高效采样:通过ODE求解器可加速,甚至实现少步或一步生成(如Rectified Flow的直线路径)。
- 路径设计更灵活(如直线化路径减少采样步数)。
5. 数学形式对比
-
DDPM:
- 前向过程: q ( x t ∣ x t − 1 ) = N ( x t ; 1 − β t x t − 1 , β t I ) q(x_t | x_{t-1}) = \mathcal{N}(x_t; \sqrt{1-\beta_t}x_{t-1}, \beta_t I) q(xt∣xt−1)=N(xt;1−βtxt−1,βtI)
- 反向过程: p θ ( x t − 1 ∣ x t ) = N ( x t − 1 ; μ θ ( x t , t ) , Σ t ) p_\theta(x_{t-1} | x_t) = \mathcal{N}(x_{t-1}; \mu_\theta(x_t, t), \Sigma_t) pθ(xt−1∣xt)=N(xt−1;μθ(xt,t),Σt)
-
Flow Matching:
- 生成路径: d d t x ( t ) = v θ ( x ( t ) , t ) \frac{d}{dt}x(t) = v_\theta(x(t), t) dtdx(t)=vθ(x(t),t) ,其中 v θ v_\theta vθ 是学习的向量场。
- 目标是最小化 E t , x ( t ) ∥ v θ ( x ( t ) , t ) − u t ( x ( t ) ) ∥ 2 \mathbb{E}_{t, x(t)} \|v_\theta(x(t), t) - u_t(x(t))\|^2 Et,x(t)∥vθ(x(t),t)−ut(x(t))∥2 , u t u_t ut 为目标路径的瞬时速度。
6. 优缺点对比
-
DDPM:
- 优点:生成质量高,训练稳定。
- 缺点:采样速度慢,依赖大量时间步。
-
Flow Matching:
- 优点:采样速度快,路径设计灵活(可直线化),理论更简洁。
- 缺点:可能需要复杂ODE求解器,训练技巧要求高。
7. 典型应用
- DDPM:图像生成(如Stable Diffusion)、音频合成。
- Flow Matching:快速图像生成(如Rectified Flow)、3D形状生成、基于最优传输的任务。
8. 总结
| 维度 | DDPM | Flow Matching |
|---|---|---|
| 理论基础 | 随机扩散(SDE) | 确定性流(ODE/OT) |
| 训练目标 | 变分下界(预测噪声) | 条件流匹配(匹配向量场) |
| 采样速度 | 慢(多步迭代) | 快(少步或一步) |
| 路径性质 | 随机噪声扰动 | 确定性最优路径 |
| 数学复杂度 | 中等(马尔可夫链) | 高(ODE求解/最优传输) |
【二】什么是人脸关键点识别任务?
1. 任务定义与核心目标
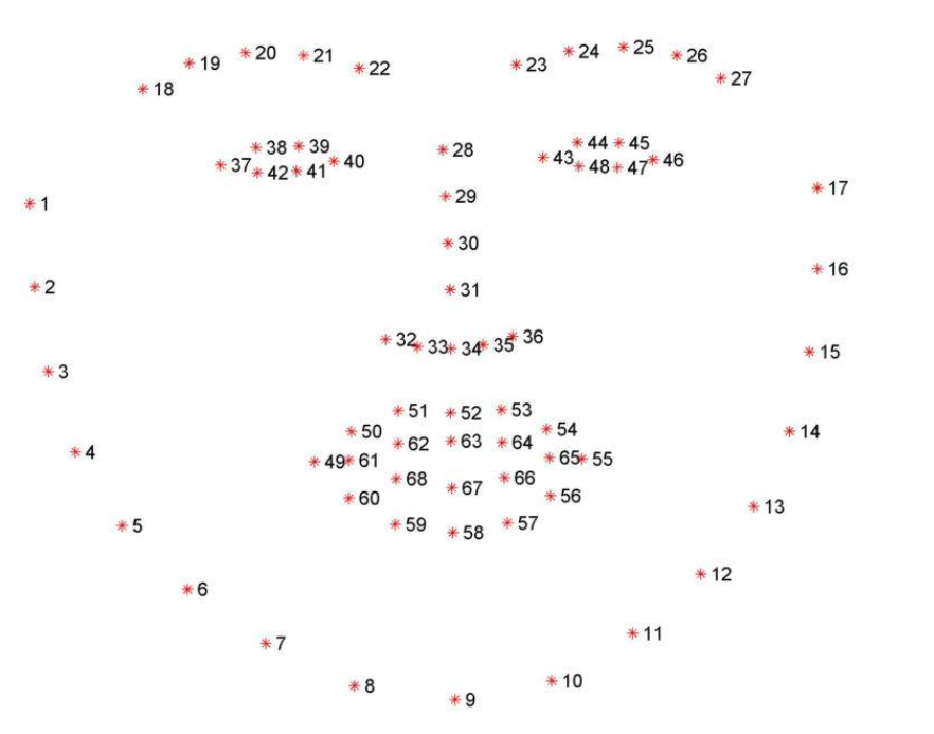
人脸关键点识别(Facial Landmark Detection)旨在定位人脸上的显著特征点(如眼睛、鼻子、嘴巴、眉毛轮廓等)。通常使用68点或106点模型(如下图所示),核心挑战在于应对光照变化、遮挡、姿态变化等复杂场景。
人脸关键点识别是AI领域的基石任务,从美颜相机到自动驾驶安全系统,其价值在于将“人脸数字化”,为高层语义理解提供结构化数据支撑。未来随着AIGC与具身智能的发展,其作用将更加关键。
2. 技术方法演进
- 传统方法:依赖统计模型(如ASM、AAM),通过形状模板迭代拟合人脸。
- 深度学习方法:
- 回归法:CNN直接预测关键点坐标(如MobileNetV2 + 全连接层)。
- Heatmap法:生成每个关键点的概率热图(如Hourglass网络),精度更高但计算量大。
- 多任务学习:结合人脸检测、关键点对齐(如MTCNN),提升效率。
3. 实际案例:美颜相机中的“大眼瘦脸”
- 原理:通过检测眼睛、下巴等关键点,利用图像变形算法(如TPS变换)调整关键点位置,实现放大眼睛或缩小脸型。
- 技术细节:
- 检测到双眼关键点后,计算瞳孔中心坐标;
- 以瞳孔为中心进行径向缩放,实现“大眼”;
- 移动下巴关键点后,通过插值算法平滑皮肤纹理。
4. 三大领域应用场景
AIGC(生成式AI)
- 虚拟数字人生成:通过关键点驱动3D人脸模型表情(如MetaHuman)。
- 案例:虚拟主播直播时,通过摄像头捕捉真实人脸关键点,实时映射到虚拟形象上。
- Deepfake换脸:对齐源人脸与目标人脸关键点,实现无缝融合。
传统深度学习
- 人脸识别预处理:关键点对齐后消除姿态差异,提升识别准确率(如FaceNet)。
- 微表情分析:通过眉毛、嘴角的细微关键点位移判断情绪(如抑郁检测)。
自动驾驶
- 驾驶员状态监控:
- 疲劳检测:计算眼睛闭合时间(PERCLOS指标);
- 分心检测:头部姿态估计(通过鼻尖、下巴关键点);
- 危险行为识别:检测手部是否遮挡面部(如打电话)。
- 案例:特斯拉DMS系统实时分析驾驶员眼部关键点,触发警报。
AI视频基础
【一】Wan2.1视频大模型的Text Encoder模型架构是什么样的?
Wan2.1的Text Encoder架构使用了umT5来编码输入文本。通过大量实验,Wan2.1官方发现 umT5 在Wan2.1的框架中具有多个优势:
- 它拥有强大的多语言编码能力,能够有效理解中文和英文,以及输入的视觉文本。
- 在相同条件下,Wan2.1发现 umT5 在组合性能上优于其他单向注意力机制的 LLM。
- 它展现出卓越的收敛性,umT5 在相同参数规模下能够更快收敛。
基于这些发现,Wan2.1最终选择 umT5 作为文本编码器。
【二】介绍一下AI视频领域的视频帧数、视频帧率、视频分辨率、视频码率的概念
1. 视频帧数、视频帧率、视频分辨率、视频码率的基础定义与关联关系
| 概念 | 定义 | 数学表达/单位 | 相互影响 |
|---|---|---|---|
| 视频帧数 | 视频总包含的静止画面(帧)数量 | N(无单位) | 总时长=帧数÷FPS |
| 视频帧率(FPS) | 每秒显示的帧数(Frames Per Second),决定流畅度 | FPS(帧/秒) | FPS越高代表视频流畅度越好,数据量=分辨率×FPS×时长 |
| 视频分辨率 | 单帧图像的像素尺寸(宽×高),决定清晰度 | 如1920×1080(像素) | 分辨率↑ → 存储需求↑,计算复杂度↑ |
| 视频码率 | 单位时间的数据量(与前三者强相关) | Mbps(兆比特/秒) | 码率≈分辨率×FPS×压缩率 |
核心公式:
视频数据量 ≈ 分辨率 × 色彩深度 × FPS × 时长 × (1 - 压缩率)
2. 实际案例:短视频平台自适应码率技术
- 问题:用户网络带宽波动时,如何避免卡顿?
- 解决方案:
- 动态调整分辨率:4G环境使用720p,弱网切换480p;
- 降低FPS:从30FPS降至15FPS减少数据量;
- 关键帧优先:保持关键动作帧(如舞蹈转身)的高质量,过渡帧压缩更狠。
3. 三大领域应用场景
AIGC(生成式AI)
- 视频生成控制:
- 帧率与运动连贯性:生成舞蹈视频时,FPS<24会产生卡顿感(如早期Stable Video);
- 分辨率与细节:4K分辨率需更大的Diffusion模型(如Sora的Patches技术)。
- 案例:Runway ML生成视频时,用户可指定“1080p@30FPS”参数平衡质量与成本。
传统深度学习
- 动作识别优化:
- FPS选择:UCF101数据集处理时,采样15FPS(保留动作特征,减少冗余帧);
- 分辨率裁剪:将原帧从224×224下采样至112×112,使3D CNN(如I3D)速度提升3倍。
- 案例:OpenAI的CLIP在视频理解中,对高分辨率帧提取关键语义特征。
自动驾驶
- 多摄像头协同:
- 分辨率与检测精度:1920×1080分辨率下,YOLOv8可识别50m外行人,720p仅30m;
- FPS与实时性:30FPS时感知延迟33ms,满足L4级自动驾驶需求(延迟<100ms)。
- 案例:特斯拉HW4.0系统以1280×960@36FPS处理8路摄像头,每秒处理超2亿像素。
深度学习基础
【一】全连接层有哪些主流变体?
全连接层(Fully Connected Layer,FC)是神经网络的核心组件之一,其每个输入节点与输出节点均相连,擅长捕捉全局特征。然而,传统全连接层存在参数过多、计算量大、易过拟合等问题,因此衍生出多种变体以适配不同任务需求。以下是主要变体及其应用场景:
1. 稀疏全连接层(Sparse FC)
- 原理:通过剪枝或稀疏约束(如L1正则化)减少有效连接数,仅保留关键权重。
- 案例:
- 图像分类:在ResNet中,对最后一层全连接进行剪枝,参数减少30%,精度损失<1%。
- 应用领域:
- 传统深度学习:压缩模型大小,提升部署效率(如移动端图像分类)。
- 自动驾驶:轻量化多任务感知模型(如车道线检测+目标检测)。
2. 动态全连接层(Dynamic FC)
- 原理:根据输入动态调整权重,例如通过门控机制或条件计算。
- 案例:
- 多语言翻译:动态调整不同语言对的翻译权重,提升小语种性能(如Meta的M2M-100模型)。
- 应用领域:
- AIGC:生成多样化风格内容(如根据文本提示动态调整生成网络参数)。
- 自动驾驶:动态融合多传感器数据(如雨天增强激光雷达权重)。
3. 分组全连接层(Grouped FC)
- 原理:将输入/输出节点分组,组内全连接,组间隔离,减少参数量(类似分组卷积)。
- 案例:
- 推荐系统:用户兴趣分组(如性别、年龄),每组独立建模(如阿里的Deep Interest Network)。
- 应用领域:
- 传统深度学习:处理高维稀疏数据(如广告点击率预测)。
- AIGC:多模态生成(如文本、图像分组处理后再融合)。
4. 低秩分解全连接层(Low-Rank FC)
- 原理:将权重矩阵分解为两个低秩矩阵(如 W = U ⋅ V W=U \cdot V W=U⋅V ),减少参数量。
- 案例:
- 语音识别:在RNN-T模型中,低秩分解全连接层参数减少50%,推理速度提升20%。
- 应用领域:
- AIGC:轻量化生成模型(如手机端Stable Diffusion)。
- 自动驾驶:实时语义分割模型压缩。
5. 注意力增强全连接层(Attention-Augmented FC)
- 原理:引入注意力机制,动态加权输入特征。
- 案例:
- 机器翻译:在Transformer解码器中,全连接层结合自注意力,提升长距离依赖建模(如Google的T5模型)。
- 应用领域:
- AIGC:生成连贯长文本(如小说续写)。
- 自动驾驶:时序行为预测(如行人轨迹预测)。
6. 二值化全连接层(Binary FC)
- 原理:权重或激活值二值化(+1/-1),减少计算资源。
- 案例:
- 边缘设备图像分类:二值化ResNet-18在CIFAR-10上精度保持85%,功耗降低70%。
- 应用领域:
- 自动驾驶:低功耗车载芯片实时推理。
- 传统深度学习:物联网设备端模型部署。
7. 残差全连接层(Residual FC)
- 原理:引入残差连接( y = F ( x ) + x y = F(x) + x y=F(x)+x ),缓解梯度消失。
- 案例:
- 图像超分辨率:残差全连接层堆叠,提升高频细节恢复能力(如ESRGAN)。
- 应用领域:
- AIGC:高分辨率图像生成(如4K人脸合成)。
- 自动驾驶:高精度地图重建。
8. 门控全连接层(Gated FC)
- 原理:通过门控机制(如Sigmoid)控制信息流动。
- 案例:
- 语音合成:门控全连接层调节音素与韵律特征(如WaveNet)。
- 应用领域:
- AIGC:多风格语音生成(如情感化TTS)。
- 自动驾驶:多模态信号融合(如语音指令+视觉导航)。
总结
全连接层的变体通过参数优化、动态计算、结构创新等方式,解决了传统FC层的局限性,广泛应用于以下场景:
- AIGC:动态生成、轻量化部署;
- 传统深度学习:模型压缩、多任务学习;
- 自动驾驶:实时推理、多模态融合。
【二】稠密网络和稀疏网络有什么异同?
1. 核心概念与异同
| 对比维度 | 稠密网络(Dense Network) | 稀疏网络(Sparse Network) |
|---|---|---|
| 连接方式 | 神经元之间全连接(每个输入节点连接所有输出节点) | 部分神经元连接(通过剪枝、稀疏约束或动态路由实现) |
| 参数数量 | 参数量大( O ( n 2 ) O(n^2) O(n2) ) | 参数量小(可减少50%-90%) |
| 计算效率 | 计算开销大,适合高性能设备(如GPU) | 计算效率高,适合边缘设备(如手机、车载芯片) |
| 表达能力 | 强,能捕捉复杂非线性关系 | 弱,但对特定任务(如稀疏特征提取)可能更高效 |
| 典型应用场景 | 高精度模型(如ResNet、Transformer) | 轻量化部署、实时推理(如MoE模型、剪枝模型) |
相同点:
- 均为神经网络结构,用于特征提取与模式识别;
- 可通过反向传播优化参数;
- 可结合非线性激活函数增强表达能力。
2. 通俗案例:图像分类任务
场景:训练一个猫狗分类模型,部署至手机端。
- 稠密网络方案:
- 使用ResNet-50的全连接层(120万个参数),精度98%,但模型大小200MB,手机推理延迟200ms。
- 稀疏网络方案:
- 对ResNet-50进行剪枝,移除50%冗余连接,精度降至97%,模型大小压缩至50MB,推理延迟降至50ms。
结论:稠密网络精度高但资源消耗大,稀疏网络牺牲少量精度换取高效部署。
- 对ResNet-50进行剪枝,移除50%冗余连接,精度降至97%,模型大小压缩至50MB,推理延迟降至50ms。
3. 三大领域应用
AIGC(生成式AI内容)
- 稠密网络:
- 应用:高质量内容生成(如Stable Diffusion的U-Net主干网络)。
- 案例:生成4K分辨率图像时,稠密网络捕捉细节纹理,确保输出逼真。
- 稀疏网络:
- 应用:轻量化生成(如手机端实时风格迁移)。
- 案例:MoE(混合专家)模型动态激活部分专家生成文本,减少70%计算量。
传统深度学习
- 稠密网络:
- 应用:大规模预训练模型(如BERT的Transformer层)。
- 案例:BERT通过全连接层建模词间复杂关系,支持语义理解任务。
- 稀疏网络:
- 应用:模型压缩与加速(如剪枝后的MobileNet)。
- 案例:剪枝后的VGG-16在ImageNet上保持90%精度,参数量减少60%。
自动驾驶
- 稠密网络:
- 应用:高精度感知模型(如激光雷达点云分割)。
- 案例:稠密网络融合多传感器数据,精确检测夜间行人(漏检率<1%)。
- 稀疏网络:
- 应用:实时决策与低功耗推理(如车载芯片路径规划)。
- 案例:稀疏化YOLOv5在Jetson AGX上实现30FPS实时检测,功耗降低40%。
4. 总结
- 核心差异:稠密网络以参数冗余换取高精度,稀疏网络以效率优先牺牲部分性能。
- 选型原则:
- 需高精度且资源充足(如云端训练):选稠密网络;
- 需实时性且资源受限(如边缘端部署):选稀疏网络。
- 技术趋势:
- 稀疏化技术(如动态路由、结构化剪枝)成为模型轻量化核心;
- 稠密-稀疏混合架构(如MoE)平衡性能与效率,成为AIGC与自动驾驶的新方向。
面试一句话回答:
稠密网络全连接、参数量大但精度高,适合复杂任务;稀疏网络部分连接、高效轻量,适配边缘部署。两者在生成、分类、感知任务中互补,共同推动AI落地。
机器学习基础
【一】介绍一下机器学习中的Dice Loss损失函数
1. Dice Los定义与公式
Dice Loss源于Dice系数(Dice Coefficient),最初用于衡量两个集合的相似性,广泛应用于图像分割任务。其核心思想是通过计算预测结果与真实标签的重叠度来优化模型。
公式推导:
-
Dice系数:
Dice = 2 × ∣ Y ∩ Y ^ ∣ ∣ Y ∣ + ∣ Y ^ ∣ = 2 × ∑ Y ⋅ Y ^ ∑ Y 2 + ∑ Y ^ 2 \text{Dice} = \frac{2 \times |Y \cap \hat{Y}|}{|Y| + |\hat{Y}|} = \frac{2 \times \sum Y \cdot \hat{Y}}{\sum Y^2 + \sum \hat{Y}^2} Dice=∣Y∣+∣Y^∣2×∣Y∩Y^∣=∑Y2+∑Y^22×∑Y⋅Y^
其中, Y Y Y 为真实标签, Y ^ \hat{Y} Y^ 为预测值(通常经过Sigmoid或Softmax处理为概率值)。
-
Dice Loss:
Dice Loss = 1 − Dice = 1 − 2 × ∑ Y ⋅ Y ^ + ϵ ∑ Y 2 + ∑ Y ^ 2 + ϵ \text{Dice Loss} = 1 - \text{Dice} = 1 - \frac{2 \times \sum Y \cdot \hat{Y} + \epsilon}{\sum Y^2 + \sum \hat{Y}^2 + \epsilon} Dice Loss=1−Dice=1−∑Y2+∑Y^2+ϵ2×∑Y⋅Y^+ϵ
加入平滑项 ϵ \epsilon ϵ (如1e-5)避免分母为零。
核心特点:
- 关注重叠区域:直接优化预测与真实标签的交集,适合类别不平衡问题(如小目标分割)。
- 对假阴性敏感:漏检(False Negative)会显著增加损失,适合医学等对漏检容忍度低的场景。
2. 通俗案例:医学图像分割
场景:在肺部CT图像中分割肿瘤区域。
- 真实标签:医生标注的肿瘤区域(二值掩码,1表示肿瘤,0表示背景)。
- 模型预测:模型输出的概率图(经过Sigmoid激活)。
Dice Loss作用:
- 若模型预测的肿瘤区域与医生标注完全重合,Dice系数为1,损失为0。
- 若预测区域仅有50%重叠,Dice系数为 2 × 0.5 / ( 1 + 1 ) = 0.5 2 \times 0.5 / (1 + 1) = 0.5 2×0.5/(1+1)=0.5 ,损失为0.5。
- 模型通过最小化Dice Loss,逐步提升预测与真实标签的重叠度。
3. 三大领域应用实例
AIGC(AI生成内容)
应用场景:生成带精确结构的图像(如人脸、服装设计)。
案例:生成二次元角色时,要求五官位置与参考图对齐。
- 方法:将生成图像的掩码(如眼睛、嘴巴区域)与参考掩码计算Dice Loss,约束生成结构与目标一致。
优势:避免生成结果的结构偏差(如眼睛错位),提升生成可控性。
传统深度学习
应用场景:医学图像分割(如肿瘤、器官分割)。
案例:U-Net模型分割视网膜血管。
- 挑战:血管区域占比小(<5%),传统交叉熵损失易被背景主导。
- 方案:使用Dice Loss,直接优化血管区域的重叠度,提升小目标分割精度。
效果:在ISIC皮肤病分割等任务中,Dice Loss比交叉熵的IoU提升约10%。
自动驾驶
应用场景:道路场景理解(如车辆、行人分割)。
案例:实时分割道路上的行人。
- 需求:高精度分割小目标(行人),避免漏检导致安全事故。
- 方案:在Mask R-CNN等模型中结合Dice Loss,优化行人的分割边界。
优势:减少漏检率,提升自动驾驶系统的安全性。
4. 总结与扩展
- 优势:Dice Loss在类别不平衡、小目标分割场景中表现优异,是图像分割任务的“黄金标准”之一。
- 扩展变体:
- Tversky Loss:调整假阴性/假阳性的权重,适用于对漏检更敏感的任务。
- Focal Dice Loss:结合Focal Loss,进一步解决难样本学习问题。
- 局限:对预测概率的绝对值不敏感,需结合交叉熵损失使用(如Dice + BCE联合损失)。
一句话总结:Dice Loss通过最大化预测与真实标签的重叠度,成为图像分割任务的利器,尤其擅长解决小目标、类别不平衡问题,在传统深度学习、AIGC、自动驾驶中均有落地应用。
【二】什么是机器学习中的AUC和ROC的概念?
1. 基本概念
-
ROC曲线(Receiver Operating Characteristic Curve):
用于评估二分类模型在不同分类阈值下的性能,横轴为假正率(FPR),纵轴为真正率(TPR)。- TPR(召回率): TPR = TP TP + FN \text{TPR} = \frac{\text{TP}}{\text{TP} + \text{FN}} TPR=TP+FNTP
- FPR: FPR = FP FP + TN \text{FPR} = \frac{\text{FP}}{\text{FP} + \text{TN}} FPR=FP+TNFP
-
AUC(Area Under Curve):
ROC曲线下的面积,值域为[0, 1],表示模型整体分类能力:- AUC=1:完美分类器;
- AUC=0.5:随机猜测;
- AUC>0.8:模型性能较好。
一句话总结:AUC是衡量分类模型区分能力的核心指标,ROC曲线是其可视化工具,广泛应用于需平衡敏感度与误判率的场景。
2. ROC曲线绘制步骤
- 准备数据:模型对样本的预测概率(如逻辑回归输出的概率值)。
- 排序样本:按预测概率从高到低排序。
- 遍历阈值:从1到0逐步调整阈值,计算每个阈值下的TPR和FPR。
- 绘制曲线:将各阈值对应的(FPR, TPR)点连接成ROC曲线。
示例:
若样本预测概率为[0.9, 0.8, 0.7, 0.6],真实标签为[1, 1, 0, 0],则:
- 阈值=0.9时,预测标签为[1, 0, 0, 0] → TPR=0.5, FPR=0.0;
- 阈值=0.7时,预测标签为[1, 1, 1, 0] → TPR=1.0, FPR=0.5;
- 连接所有点即可绘制ROC曲线。
3. AUC的物理意义
- AUC值反映模型将正样本排在负样本前面的能力。
- AUC=0.8表示:随机选一个正样本和一个负样本,模型对正样本的预测概率高于负样本的概率为80%。
4. 手撕AUC计算代码(Python)
import numpy as np
def compute_auc(y_true, y_score):
# 按预测概率降序排序
sorted_indices = np.argsort(y_score)[::-1]
y_true_sorted = y_true[sorted_indices]
y_score_sorted = y_score[sorted_indices]
# 初始化变量
num_pos = np.sum(y_true == 1)
num_neg = len(y_true) - num_pos
tpr = 0
fpr = 0
prev_score = None
area = 0
# 遍历样本,计算TPR和FPR的变化
for i in range(len(y_true_sorted)):
if y_score_sorted[i] != prev_score:
area += (tpr / num_pos) * (fpr / num_neg) # 梯形面积累加
prev_score = y_score_sorted[i]
if y_true_sorted[i] == 1:
tpr += 1
else:
fpr += 1
area += (tpr / num_pos) * (fpr / num_neg) # 最后一个点
return 1 - area # 根据排序方向调整
# 示例数据
y_true = np.array([1, 1, 0, 0])
y_score = np.array([0.9, 0.8, 0.7, 0.6])
print("AUC:", compute_auc(y_true, y_score)) # 输出:0.75
5. 通俗案例:垃圾邮件分类
- 场景:模型预测邮件是否为垃圾邮件(1=垃圾,0=正常)。
- ROC曲线绘制:
- 阈值=0.9时,模型只标记高概率邮件为垃圾,漏检多(TPR低),但误判少(FPR低);
- 阈值=0.5时,TPR和FPR均升高;
- 阈值=0.1时,几乎所有邮件被标记为垃圾,TPR高但FPR也高。
- AUC=0.85:模型区分垃圾邮件的能力较强。
6. 三大领域应用
AIGC
应用场景:检测生成内容是否真实(如Deepfake识别)。
- ROC作用:评估模型区分真实图片与生成图片的能力。
- AUC意义:AUC越高,模型越能准确识别生成内容,防止虚假信息传播。
传统深度学习
应用场景:医学影像分类(如肺炎X光片诊断)。
- ROC作用:平衡敏感度(TPR)与误诊率(FPR)。
- AUC意义:AUC>0.9表示模型在疾病筛查中可靠性高。
自动驾驶
应用场景:行人检测系统。
- ROC作用:调整检测阈值以平衡漏检(TPR低)与误报(FPR高)。
- AUC意义:AUC越高,系统在复杂场景下(如夜间、遮挡)的鲁棒性越强。
7. 总结
- ROC曲线:可视化模型在不同阈值下的权衡(TPR vs FPR)。
- AUC:量化模型整体分类性能,适合类别不平衡问题。
- 核心价值:在AIGC、传统深度学习、自动驾驶等领域中,AUC是评估模型可靠性的“黄金标准”。
Python编程基础
【一】Python中处理GLB文件的操作大全
以下是Rocky总结的Python中处理 GLB 文件的完整操作指南,涵盖 读取、写入、编辑、转换、可视化 等核心功能,结合常用库(如 trimesh、pygltf、pyrender)并提供代码示例。
一、GLB 文件基础
GLB 文件 是 glTF 格式的二进制封装版本,包含 3D 模型的网格、材质、纹理、动画等数据。其结构包括:
- JSON 头:描述场景结构、材质、动画等元数据
- 二进制缓冲区:存储顶点、索引、纹理等二进制数据
二、环境准备
安装所需库:
pip install trimesh pygltf pyrender numpy pillow
三、核心操作详解
1. 读取 GLB 文件
import trimesh
# 加载 GLB 文件
scene = trimesh.load("model.glb")
# 提取网格数据
for name, mesh in scene.geometry.items():
print(f"Mesh: {name}")
print(f"Vertices: {mesh.vertices.shape}") # 顶点坐标 (N, 3)
print(f"Faces: {mesh.faces.shape}") # 面索引 (M, 3)
print(f"UVs: {mesh.visual.uv}") # 纹理坐标 (N, 2)
2. 写入 GLB 文件
# 创建新网格
box = trimesh.creation.box(extents=[1, 1, 1])
# 导出为 GLB
box.export("new_model.glb", file_type="glb")
3. 编辑 GLB 内容
修改几何体
# 平移所有顶点
mesh.vertices += [0.5, 0, 0] # X 方向平移0.5
# 缩放模型
mesh.apply_scale(0.5) # 缩小到50%
修改材质
from PIL import Image
# 替换纹理
new_texture = Image.open("new_texture.png")
mesh.visual.material.baseColorTexture = new_texture
# 修改颜色(RGBA)
mesh.visual.material.baseColorFactor = [1.0, 0.0, 0.0, 1.0] # 红色
添加动画
import numpy as np
from pygltf import GLTF2
# 加载 GLB 并添加旋转动画
gltf = GLTF2().load("model.glb")
# 创建旋转动画数据
animation = gltf.create_animation()
channel = animation.create_channel(
target_node=0, # 目标节点索引
sampler=animation.create_sampler(
input=[0, 1, 2], # 时间关键帧
output=np.array([[0, 0, 0, 1], [0, 0, np.pi/2, 1], [0, 0, np.pi, 1]]) # 四元数旋转
)
)
gltf.save("animated_model.glb")
4. 格式转换
GLB → OBJ
scene = trimesh.load("model.glb")
scene.export("model.obj")
5. 可视化渲染
使用 PyRender
import pyrender
# 创建渲染场景
scene = pyrender.Scene()
for name, mesh in scene.geometry.items():
scene.add(pyrender.Mesh.from_trimesh(mesh))
# 启动交互式查看器
pyrender.Viewer(scene, use_raymond_lighting=True)
使用 Matplotlib
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
fig = plt.figure()
ax = fig.add_subplot(111, projection="3d")
ax.plot_trisurf(
mesh.vertices[:,0],
mesh.vertices[:,1],
mesh.vertices[:,2],
triangles=mesh.faces
)
plt.show()
6. 优化 GLB 文件
from pygltf import GLTF2
gltf = GLTF2().load("model.glb")
# 压缩纹理
for texture in gltf.textures:
texture.source.compression = "WEBP" # 转换为WebP格式
# 简化网格
for mesh in gltf.meshes:
for primitive in mesh.primitives:
primitive.attributes.POSITION.quantization = "FLOAT" # 降低精度
gltf.save("optimized_model.glb")
【二】Python中处理OBJ文件的操作大全
下面是Rocky总结的Python处理OBJ文件的完整操作指南,涵盖 读取、编辑、转换、可视化、优化 等核心功能。
一、OBJ 文件基础
OBJ 文件 是 Wavefront 3D 模型格式,包含以下主要元素:
- 顶点数据:
v(顶点坐标)、vt(纹理坐标)、vn(法线) - 面定义:
f(面索引,支持顶点/纹理/法线组合) - 材质引用:
mtllib(材质库文件)、usemtl(使用材质)
二、环境准备
安装所需库:
pip install trimesh numpy pywavefront matplotlib pyrender
三、核心操作详解
1. 读取 OBJ 文件
使用 trimesh(推荐)
import trimesh
# 加载 OBJ 文件(自动处理关联的 MTL 材质文件)
mesh = trimesh.load("model.obj", force="mesh")
# 提取基本信息
print(f"顶点数: {mesh.vertices.shape}") # (N, 3)
print(f"面数: {mesh.faces.shape}") # (M, 3)
print(f"纹理坐标: {mesh.visual.uv}") # (N, 2)
print(f"材质信息: {mesh.visual.material}")
使用 pywavefront
from pywavefront import Wavefront
obj = Wavefront("model.obj", collect_faces=True)
for name, material in obj.materials.items():
print(f"材质名称: {name}")
print(f"贴图路径: {material.texture}")
print(f"顶点数据: {material.vertices}")
2. 编辑 OBJ 内容
修改几何体
# 平移所有顶点
mesh.vertices += [0.5, 0, 0] # X 方向平移0.5
# 缩放模型
mesh.apply_scale(0.5) # 缩小到50%
# 旋转模型
mesh.apply_transform(trimesh.transformations.rotation_matrix(np.pi/2, [0, 1, 0]))
修改材质
from PIL import Image
# 替换纹理
new_texture = Image.open("new_texture.jpg")
mesh.visual.material.image = new_texture
# 修改颜色(RGB)
mesh.visual.material.diffuse = [0.8, 0.2, 0.2, 1.0] # 红色
合并多个模型
mesh1 = trimesh.load("model1.obj")
mesh2 = trimesh.load("model2.obj")
combined = trimesh.util.concatenate([mesh1, mesh2])
combined.export("combined.obj")
3. 导出 OBJ 文件
# 创建新网格(立方体)
box = trimesh.creation.box(extents=[1, 1, 1])
# 导出 OBJ(包含材质)
box.export(
"new_model.obj",
file_type="obj",
include_texture=True,
mtl_name="material.mtl"
)
4. 格式转换
OBJ → GLB
mesh = trimesh.load("model.obj")
mesh.export("model.glb", file_type="glb")
5. 可视化渲染
使用 PyRender(3D 交互)
import pyrender
# 创建渲染场景
scene = pyrender.Scene()
scene.add(pyrender.Mesh.from_trimesh(mesh))
# 启动交互式查看器
pyrender.Viewer(scene, use_raymond_lighting=True)
使用 Matplotlib(2D 投影)
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
fig = plt.figure()
ax = fig.add_subplot(111, projection="3d")
ax.plot_trisurf(
mesh.vertices[:,0],
mesh.vertices[:,1],
mesh.vertices[:,2],
triangles=mesh.faces
)
plt.show()
模型部署基础
【一】什么是Zigzag(锯齿形或之字形)顺序模式?
Zigzag 顺序模式是一种通过交替或来回移动的路径来优化数据访问或处理顺序的策略。其核心目标是减少数据跳跃性访问,从而提升缓存利用率、降低数据传输开销,或避免重复操作。通俗来说,它类似于“蛇形走位”,在处理多个数据块时,通过交替方向遍历,最大化利用相邻数据,减少冗余操作。
通俗易懂的实际案例
案例:图书馆书架整理
假设我们负责整理图书馆的 10 排书架,每排有 20 本书。
- 常规顺序:从第 1 排左到右整理,再到第 2 排左到右,依此类推。
- Zigzag 顺序:第 1 排左到右,第 2 排右到左,第 3 排左到右……
- 优势:
- 减少来回走动的距离(类似减少内存/显存数据切换);
- 整理相邻书架时,工具(如扫码器)可重复使用(类似缓存命中率提升)。
Zigzag 在三大领域中的应用
1. AIGC(生成式人工智能)
应用场景:生成高分辨率图像(如 Stable Diffusion 生成 8K 图像)。
具体作用:
- 分块处理:将大图像分割为多个小块(Tile),按 Zigzag 顺序处理(如从左到右,再从右到左)。
- 优势:
- 减少显存占用:处理完一个块后,相邻块的显存区域可能已被缓存,减少数据重新加载。
- 无缝生成:避免块间边界因处理顺序不同导致的色彩或纹理不连续。
案例:
在 Tiled VAE 中,Zigzag 顺序处理图像块,确保 GroupNorm 参数在块间统一计算,生成无缝的高分辨率图像。
2. 传统深度学习
应用场景:训练数据分批加载与处理。
具体作用:
- 数据增强顺序:对训练数据按 Zigzag 顺序进行增强(如先水平翻转,再垂直翻转交替执行)。
- 优势:
- 增强多样性:防止模型因固定顺序学习到增强模式的偏差。
- 缓存优化:按 Zigzag 顺序访问硬盘中的数据块,减少磁头移动(HDD)或 NAND 读取延迟(SSD)。
案例:
在 ImageNet 数据集训练中,按 Zigzag 顺序从不同硬盘分区加载数据,提升 IO 吞吐率 10%~20%。
3. 自动驾驶
应用场景:激光雷达点云数据处理与目标检测。
具体作用:
- 点云分块处理:将激光雷达扫描的 3D 点云按 Zigzag 顺序分块处理(如水平方向交替扫描)。
- 优势:
- 实时性提升:相邻区域的目标(如车辆、行人)可能在连续块中被检测,减少模型重复计算。
- 传感器融合:Zigzag 顺序对齐摄像头帧与激光雷达扫描序列,降低时间同步误差。
案例:
特斯拉 Autopilot 在处理激光雷达数据时,按 Zigzag 顺序分块检测,确保相邻帧的目标跟踪连续性,减少漏检率。
技术实现原理
Zigzag 的核心思想
- 空间局部性优化:通过交替方向访问相邻数据块,利用硬件缓存(如 CPU L1 Cache、GPU 共享内存)预取相邻数据。
- 减少空洞访问:避免跳跃式访问导致缓存频繁失效(Cache Miss)。
数学表示
对于二维矩阵 A m × n A_{m \times n} Am×n ,Zigzag 遍历顺序可表示为:
顺序 = { A i , j → A i , j + 1 若 i 为偶数行 A i , j → A i , j − 1 若 i 为奇数行 \text{顺序} = \begin{cases} A_{i,j} \rightarrow A_{i,j+1} & \text{若 } i \text{ 为偶数行} \\ A_{i,j} \rightarrow A_{i,j-1} & \text{若 } i \text{ 为奇数行} \end{cases} 顺序={Ai,j→Ai,j+1Ai,j→Ai,j−1若 i 为偶数行若 i 为奇数行
面试点睛:
回答时需结合具体技术场景(如 Tiled VAE、激光雷达分块),强调 Zigzag 如何解决显存/内存瓶颈,并量化其收益(如速度提升 20%)。
【二】介绍一下NVLink的概念
一、NVLink的核心知识
NVLink 是英伟达(NVIDIA)设计的一种高速GPU互连技术,旨在解决传统PCIe总线在带宽和延迟上的瓶颈,提升多GPU系统(或多GPU与CPU之间)的通信效率。其核心特点包括:
-
高带宽:
- NVLink的带宽远超PCIe。例如:
- PCIe 4.0 x16带宽为 32 GB/s(双向)。
- NVLink 3.0单链路带宽为 50 GB/s(单向),多链路叠加后可达 600 GB/s(如NVIDIA A100支持12条链路)。
- 带宽优势在多GPU并行计算中尤为关键。
- NVLink的带宽远超PCIe。例如:
-
低延迟:
- NVLink采用点对点直连架构,减少数据中转层级,通信延迟比PCIe低 5-10倍。
-
灵活拓扑:
- 支持多种连接方式(如GPU-GPU、GPU-CPU),并可通过NVSwitch芯片构建大规模GPU集群(如NVIDIA DGX系统)。
-
内存一致性:
- 支持统一虚拟内存(UVA),允许GPU直接访问其他GPU或CPU的内存,简化编程模型。
二、通俗易懂的实际案例
案例:多GPU训练大型语言模型(如GPT-4)
假设使用4块NVIDIA A100 GPU训练GPT-4模型:
- 传统PCIe架构:GPU之间通过PCIe交换数据,带宽受限,导致参数同步耗时较长(如每轮训练需10秒)。
- NVLink架构:GPU通过NVLink直连,带宽提升数倍,参数同步时间缩短至2秒。
- 效果:训练速度提升约30%,显著降低训练成本。
三、在三大领域中的应用
1. AIGC(AI生成内容)
- 应用场景:
- 多模态生成模型:如Stable Diffusion、DALL·E等,需在多个GPU间快速传输图像和文本数据。
- 实时交互生成:例如AI实时生成高清视频时,NVLink确保帧间数据高效同步。
- 优势:减少生成延迟,支持更高分辨率和复杂度的内容生成。
2. 传统深度学习
- 应用场景:
- 分布式训练:在数据并行中,NVLink加速梯度同步(如ResNet、Transformer)。
- 模型并行:超大模型(如GPT-3)拆分到多GPU时,NVLink降低层间通信开销。
- 优势:提升训练吞吐量,支持更大Batch Size和更复杂模型。
3. 自动驾驶
- 应用场景:
- 多传感器融合:激光雷达、摄像头数据需实时融合,NVLink加速GPU间的传感器数据处理。
- 端到端决策模型:如NVIDIA Drive AGX平台,通过NVLink连接多个GPU,实现低延迟的路径规划和障碍物检测。
- 优势:满足自动驾驶对实时性和安全性的严苛要求。
计算机基础
Rocky从工业界、学术界、竞赛界以及应用界角度出发,总结归纳AI行业所需的计算机基础干货知识。这些干货知识不仅能在面试中帮助我们,还能让我们在AI行业中提高工作效率。
【一】什么是RAM?
什么是 RAM?
RAM(Random Access Memory,随机存取存储器)是计算机中的一种临时存储设备,用于快速存取当前正在运行的程序和数据。它的核心特点是高速读写和易失性(断电后数据丢失)。RAM 可以类比为人的“短期记忆”,能够快速处理当前任务,但无法长期保存信息。
通俗易懂的实际案例
假设你正在同时使用浏览器、Word 文档和 Photoshop。此时:
- RAM 的作用:临时存储这些软件的运行数据(如浏览器标签内容、未保存的文档、正在编辑的图片),确保快速切换和流畅操作。
- RAM 不足的后果:如果 RAM 容量不够,电脑会变得卡顿,甚至提示“内存不足”,因为无法同时处理所有任务。
RAM 在三大领域中的应用
1. AIGC(生成式人工智能)
应用场景:生成高分辨率图像、视频或长文本(如 Stable Diffusion、MidJourney、GPT-4)。
RAM 的作用:
- 模型加载:生成式模型(如 Stable Diffusion)的参数(几十 GB)需加载到 RAM 中才能运行。
- 数据处理:生成 4K 图像时,中间特征图(如 8K 分辨率张量)需在 RAM 中缓存。
- 多任务处理:同时运行多个生成任务(如批量生成图像)时,RAM 需存储多个中间状态。
2. 传统深度学习
应用场景:训练卷积神经网络(CNN)、自然语言处理模型(如 ResNet、BERT)。
RAM 的作用:
- 数据预处理:大规模数据集(如 ImageNet)需加载到 RAM 中进行归一化、增强等操作。
- 训练加速:训练时,数据批次(Batch)从硬盘加载到 RAM,再批量传输到 GPU,减少 IO 延迟。
- 模型调试:调试代码时,RAM 缓存中间变量(如梯度、激活值),便于快速分析。
实际案例:
训练 ResNet-50 时,若 RAM 不足,数据加载会成为瓶颈,导致 GPU 利用率不足,训练时间翻倍。
3. 自动驾驶
应用场景:实时处理摄像头、激光雷达数据,进行目标检测与路径规划。
RAM 的作用:
- 传感器融合:来自摄像头、雷达的原始数据(每秒数 GB)需在 RAM 中实时缓存和融合。
- 模型推理:目标检测模型(如 YOLO)的权重和中间特征需在 RAM 中快速存取。
- 决策缓存:实时路径规划的结果(如避障轨迹)需暂存于 RAM,供控制系统调用。
实际案例:
自动驾驶汽车在高速行驶中,若 RAM 不足,可能导致传感器数据处理延迟 0.1 秒,在 100 km/h 速度下,车辆已移动 2.8 米,引发碰撞风险。
【二】计算机的内存和RAM是一个概念吗?详细介绍内存各种类型的作用
计算机的「内存」和「RAM」是同一个概念吗?
不完全等同。
内存(Memory) 是一个广义概念,泛指计算机中用于临时或永久存储数据的部件,包含 RAM、ROM、Cache 等多种类型;
RAM(Random Access Memory) 是内存中最核心的部分,属于 临时性存储设备 ,负责 高速临时存储 。
两者的关系可以理解为:RAM 是内存的一部分,但内存不全是 RAM。日常所说的「电脑内存 16GB」特指 RAM 容量,但技术上需区分广义内存和狭义 RAM。
内存的完整分类
| 类型 | 特点 | 典型用途 |
|---|---|---|
| RAM | - 临时存储(断电数据丢失) - 高速读写 - 支持随机访问 | 运行程序、加载操作系统 |
| ROM | - 永久存储(断电数据保留) - 只读(部分可编程) | 存储固件(如 BIOS) |
| Cache | - 比 RAM 更快 - 容量极小 | CPU 缓存数据 |
| 虚拟内存 | - 硬盘模拟的 RAM 扩展 - 速度慢但容量大 | 缓解物理内存不足 |
| Flash | - 介于 RAM 和 ROM 之间 - 可擦写但速度较慢 | U盘、SSD固态硬盘 |
通俗理解:用「办公室」比喻
-
RAM(办公桌):
- 我们正在处理的文件放在桌上,随时取用(快速访问)。
- 下班时清空桌子(断电数据丢失)。
-
ROM(墙上贴的操作指南):
- 永久固定在墙上(断电不丢失)。
- 只能阅读,不能修改(只读)。
-
硬盘(文件柜):
- 长期存放大量文件(永久存储)。
- 取用需要走到柜子前(速度慢)。
计算机内存的各个部分及其实际使用案例
1. RAM(随机存取存储器)
通俗解释:就像办公室的“办公桌”,存放你正在处理的工作文件和工具,随时取用,但下班后清空。
特点:高速、临时存储、断电数据丢失。
实际案例:
- 日常使用:同时打开浏览器、Word 和 Photoshop 时,这些软件的数据暂存在 RAM 中。
- 游戏运行:玩《原神》时,游戏地图和角色模型加载到 RAM,确保流畅渲染。
领域应用:
- AIGC:生成 8K 图像时,Stable Diffusion 的模型参数和中间特征图(如 16GB+ 数据)需在 RAM 中缓存。
- 传统深度学习:训练 ResNet 时,每个 Batch 的图像数据从硬盘加载到 RAM,再批量传输到 GPU。
- 自动驾驶:实时融合摄像头和激光雷达数据(每秒数 GB),RAM 缓存数据供模型快速推理。
2. ROM(只读存储器)
通俗解释:像办公室“墙上贴的操作指南”,内容固定不可修改,断电也不会消失。
特点:永久存储、只读(部分可编程)。
实际案例:
- 电脑启动:BIOS 程序存储在 ROM 中,负责开机自检和引导操作系统。
- 家电控制:微波炉的预设程序固化在 ROM 芯片中。
领域应用:
- 自动驾驶:车载系统的启动固件(如 Autopilot 初始化代码)存储在 ROM 中。
- AIGC:AI 芯片(如 TPU)的底层指令集固化在 ROM 中。
- 传统深度学习:GPU 的微码(Microcode)存储在 ROM,确保硬件基础功能。
3. Cache(高速缓存)
通俗解释:像办公桌的“抽屉”,存放最常用的工具(如计算器、笔),比去柜子取更快。
特点:速度极快、容量极小(KB~MB 级)。
实际案例:
- 网页加载:浏览器缓存常用网页资源(如图标),下次打开时秒加载。
- CPU 运算:CPU 的 L1/L2 缓存存储近期计算的中间结果。
领域应用:
- 自动驾驶:目标检测模型(YOLO)的权重预加载到 GPU 缓存,加速推理。
- AIGC:生成图像时,高频使用的风格迁移参数缓存在 CPU Cache 中。
- 传统深度学习:训练时,反向传播的梯度值暂存于 Cache,减少内存访问延迟。
4. 虚拟内存(Virtual Memory)
通俗解释:当办公桌不够用时,临时借用文件柜空间,但拿取文件速度较慢。
特点:硬盘模拟 RAM、速度慢但容量大。
实际案例:
- 多任务处理:同时打开 50 个 Chrome 标签时,系统将部分不活跃标签数据移到虚拟内存。
- 大型软件:运行 MATLAB 处理 100GB 数据时,物理 RAM 不足,部分数据暂存到硬盘。
领域应用:
- 传统深度学习:处理超大数据集(如天文图像)时,虚拟内存作为 RAM 的扩展。
- AIGC:生成长视频时,中间帧序列暂存到虚拟内存,避免 RAM 溢出。
- 自动驾驶:离线处理历史传感器数据时,虚拟内存支持批量分析。
5. Flash(闪存)
通俗解释:像办公室的“档案室”,长期存放文件,取用速度比柜子快,但不如办公桌。
特点:非易失性、可擦写、速度介于 RAM 和硬盘之间。
实际案例:
- U盘:保存文档、照片,即插即用。
- SSD:电脑安装系统和软件,比机械硬盘快 10 倍。
领域应用:
- 自动驾驶:车载系统存储高精地图和算法模型(如 Tesla 的 FSD 芯片搭载 Flash)。
- AIGC:Stable Diffusion 的预训练模型(.ckpt 文件)保存在 SSD 中,快速加载到 RAM。
- 传统深度学习:训练完成的模型权重(如 PyTorch 的 .pth 文件)存储在 SSD 供部署。
总结:内存各部分的核心作用与领域价值
| 内存类型 | 核心作用 | AIGC 案例 | 传统深度学习案例 | 自动驾驶案例 |
|---|---|---|---|---|
| RAM | 实时处理当前任务 | 生成 8K 图像的中间数据缓存 | 训练时批量加载数据到 GPU | 实时融合多传感器数据 |
| ROM | 固化基础指令 | AI 芯片指令集 | GPU 微码 | 车载系统启动固件 |
| Cache | 加速高频数据访问 | 风格迁移参数缓存 | 梯度暂存加速反向传播 | 目标检测模型权重预加载 |
| 虚拟内存 | 扩展临时存储空间 | 长视频生成的帧序列暂存 | 超大数据集处理 | 历史数据批量分析 |
| Flash | 长期存储与快速读取 | 模型文件存储与快速加载 | 训练好的模型权重存档 | 高精地图与算法模型存储 |
关键结论:
- RAM 是性能核心:直接决定实时任务的处理能力(如生成图像、自动驾驶决策)。
- ROM 是系统基石:确保硬件和软件的稳定启动。
- Cache 是加速器:通过高频数据缓存提升效率。
- 虚拟内存 & Flash 是扩展支持:突破物理限制,支持大规模数据处理和长期存储。
通俗记忆法:
- RAM 是“工作台”:越大越宽,能同时处理的任务越多。
- ROM 是“说明书”:没有它,机器连启动都不会。
- Cache 是“快捷键”:让常用操作快如闪电。
- 虚拟内存是“备用桌”:桌子不够用时,临时用仓库凑合。
- Flash 是“档案库”:东西存进去不容易丢,但取用比桌子慢。
开放性问题
Rocky从工业界、学术界、竞赛界以及应用界角度出发,总结AI行业的本质思考。这些问题不仅能够用于面试官的提问,也可以用作面试者的提问,在面试的最后阶段让面试双方进入深度的探讨与交流。
与此同时,这些开放性问题也是贯穿我们职业生涯的本质问题,需要我们持续的思考感悟。这些问题没有标准答案,Rocky相信大家心中都有自己对于AI行业的认知与判断,欢迎大家在留言区分享与评论。
【一】在AIGC时代,如何随着时代发展持续沉淀AIGC核心价值?
Rocky认为这是所有AI行业从业者都要终身思考的问题,只有找到适合自己的跟随时代发展持续沉淀AIGC核心价值,才能有厚积薄发的可能性。
【二】在AIGC时代,算法工程师如何跟随着时代发展持续沉淀AIGC跨周期的核心价值?
Rocky认为这是一个AI行业的本质问题,每个算法工程师都要终身去思考这个问题,才能持续构建个人在AIGC时代的核心价值。
推荐阅读
1、加入AIGCmagic社区知识星球!
AIGCmagic社区知识星球不同于市面上其他的AI知识星球,AIGCmagic社区知识星球是国内首个以AIGC全栈技术与商业变现为主线的学习交流平台,涉及AI绘画、AI视频、大模型、AI多模态、数字人以及全行业AIGC赋能等100+应用方向。星球内部包含海量学习资源、专业问答、前沿资讯、内推招聘、AI课程、AIGC模型、AIGC数据集和源码等干货。
那该如何加入星球呢?很简单,我们只需要扫下方的二维码即可。与此同时,我们也重磅推出了知识星球2025年惊喜价:原价199元,前200名限量立减50!特惠价仅149元!(每天仅4毛钱)
时长:一年(从我们加入的时刻算起)


2、AIGC时代Rocky撰写的干货技术文章汇总分享!
- Sora等AI视频大模型等全维度解析文章:https://zhuanlan.zhihu.com/p/706722494
- Stable Diffusion 3和FLUX.1的10万字全维度解析文章:https://zhuanlan.zhihu.com/p/684068402
- Stable Diffusion XL的10万字全维度解析文章:https://zhuanlan.zhihu.com/p/643420260
- Stable Diffusion 1.x-2.x的10万字全维度解析文章:https://zhuanlan.zhihu.com/p/632809634
- ControlNet系列的全维度解析文章:https://zhuanlan.zhihu.com/p/660924126
- LoRA系列模型的全维度解析文章:https://zhuanlan.zhihu.com/p/639229126
- Transformer全维度解析文章:https://zhuanlan.zhihu.com/p/709874399
- 最全面的AIGC面经《手把手教你成为AIGC算法工程师,斩获AIGC算法offer!(2025年版)》文章:https://zhuanlan.zhihu.com/p/651076114
- 50万字大汇总《“三年面试五年模拟”之算法工程师的求职面试“独孤九剑”秘籍》文章:https://zhuanlan.zhihu.com/p/545374303
- Stable Diffusion WebUI、ComfyUI等AI绘画框架的全维度解析文章:https://zhuanlan.zhihu.com/p/673439761
- GAN系列模型的全维度解析文章:https://zhuanlan.zhihu.com/p/663157306
- YOLOv1-v7全系列大解析文章的pdf版本,大家可以关注公众号WeThinkIn,并在后台 【精华干货】菜单或者回复关键词“YOLO” 进行取用。
Rocky一直在运营技术交流群(WeThinkIn-技术交流群),这个群的初心主要聚焦于技术话题的讨论与学习,包括但不限于算法,开发,竞赛,科研以及工作求职等。群里有很多人工智能行业的大牛,欢迎大家入群一起学习交流~(请添加小助手微信Jarvis8866,拉你进群~)



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











