#include "opencv2/core/core.hpp"
#include "opencv2/features2d/features2d.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <opencv2/nonfree/nonfree.hpp>
#include<opencv2/legacy/legacy.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main(int argc, char** argv)
{
//【1】载入源图片
Mat img_1 = imread("e:\\1.jpg");
Mat img_2 = imread("e:\\2.jpg");
if (!img_1.data || !img_2.data) { printf("读取图片image0错误~! \n"); return false; }
//【2】利用SURF检测器检测的关键点
int minHessian = 300;
SURF detector(minHessian);
std::vector<KeyPoint> keypoints_1, keypoints_2;
detector.detect(img_1, keypoints_1);
detector.detect(img_2, keypoints_2);
//【3】计算描述符(特征向量)
SURF extractor;
Mat descriptors_1, descriptors_2;
extractor.compute(img_1, keypoints_1, descriptors_1);
extractor.compute(img_2, keypoints_2, descriptors_2);
//【4】采用FLANN算法匹配描述符向量
FlannBasedMatcher matcher;
std::vector< DMatch > matches;
matcher.match(descriptors_1, descriptors_2, matches);
double max_dist = 0; double min_dist = 100;
//【5】快速计算关键点之间的最大和最小距离
for (int i = 0; i < descriptors_1.rows; i++)
{
double dist = matches[i].distance;
if (dist < min_dist) min_dist = dist;
if (dist > max_dist) max_dist = dist;
}
//输出距离信息
printf("> 最大距离(Max dist) : %f \n", max_dist);
printf("> 最小距离(Min dist) : %f \n", min_dist);
//【6】存下符合条件的匹配结果(即其距离小于2* min_dist的),使用radiusMatch同样可行
std::vector< DMatch > good_matches;
for (int i = 0; i < descriptors_1.rows; i++)
{
if (matches[i].distance < 2 * min_dist)
{
good_matches.push_back(matches[i]);
}
}
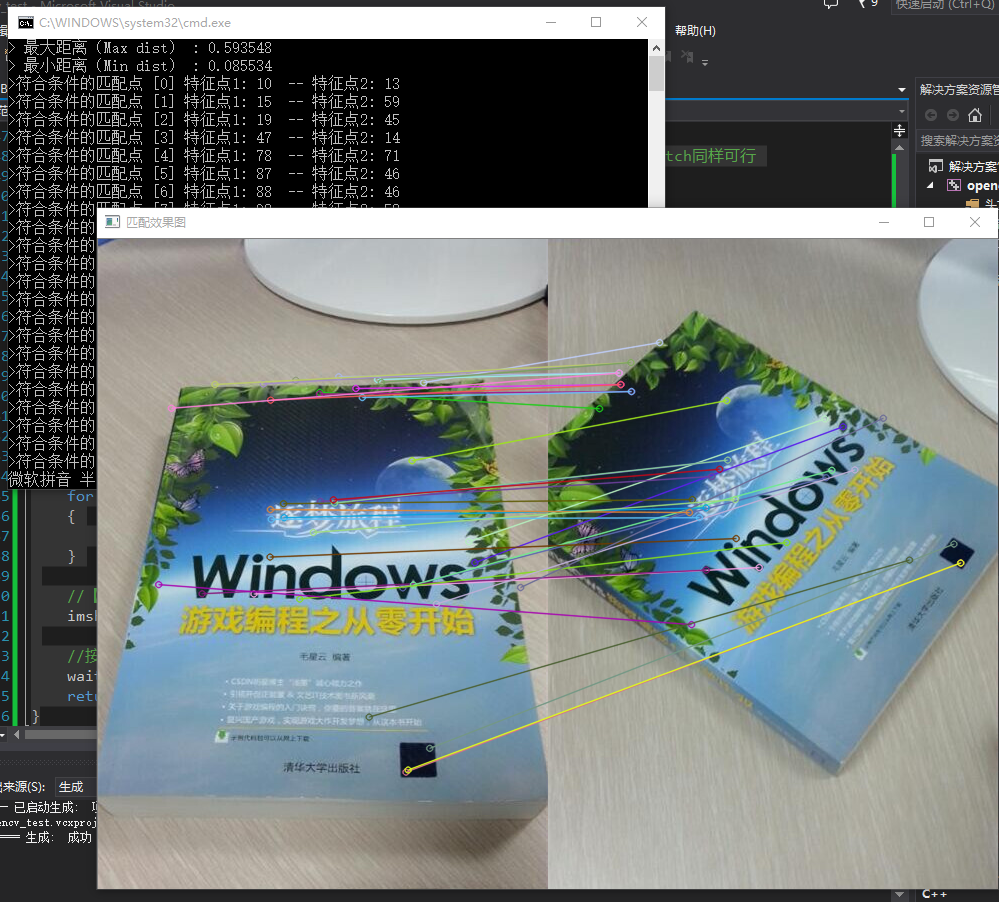
//【7】绘制出符合条件的匹配点
Mat img_matches;
drawMatches(img_1, keypoints_1, img_2, keypoints_2,
good_matches, img_matches, Scalar::all(-1), Scalar::all(-1),
vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
//【8】输出相关匹配点信息
for (int i = 0; i < good_matches.size(); i++)
{
printf(">符合条件的匹配点 [%d] 特征点1: %d -- 特征点2: %d \n", i, good_matches[i].queryIdx, good_matches[i].trainIdx);
}
//【9】显示效果图
imshow("匹配效果图", img_matches);
//按任意键退出程序
waitKey(0);
return 0;
}























 167
167











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









