







 文章详细介绍了计算机图形学中的图形变换,包括齐次坐标的使用,二维和三维空间的平移、缩放、旋转、对称和错切变换。还讨论了复合变换以及如何进行参考点变换。此外,提到了三维空间中的投影变换,如正平行投影和透视投影的概念及计算方法。
文章详细介绍了计算机图形学中的图形变换,包括齐次坐标的使用,二维和三维空间的平移、缩放、旋转、对称和错切变换。还讨论了复合变换以及如何进行参考点变换。此外,提到了三维空间中的投影变换,如正平行投影和透视投影的概念及计算方法。
计算机图形学 第六章 图形变换
这章一般只考一道题(10分左右)
数学基础
(都是线性代数的知识,这里略写)
齐次坐标: 将一个原本是 n n n 维的向量用一个 n + 1 n+1 n+1 维向量来表示
-
如 ( x 1 , x 2 , . . . x n ) (x_1,\,x_2,\,...x_n) (x1,x2,...xn) 的其次坐标表示为 ( h x 1 , h x 2 , . . . , h x n , h ) (hx_1,\,hx_2,\,...,\,hx_n,\,h) (hx1,hx2,...,hxn,h) ,其中 h h h 是一个实数;
-
普通物理坐标与齐次坐标是一对多的关系
几何变换
要会写不同变换的矩阵
窗口区到视图区的坐标变换
需求: 实际的窗口区与视图区往往不一样大,需要从窗口区变换到视图区
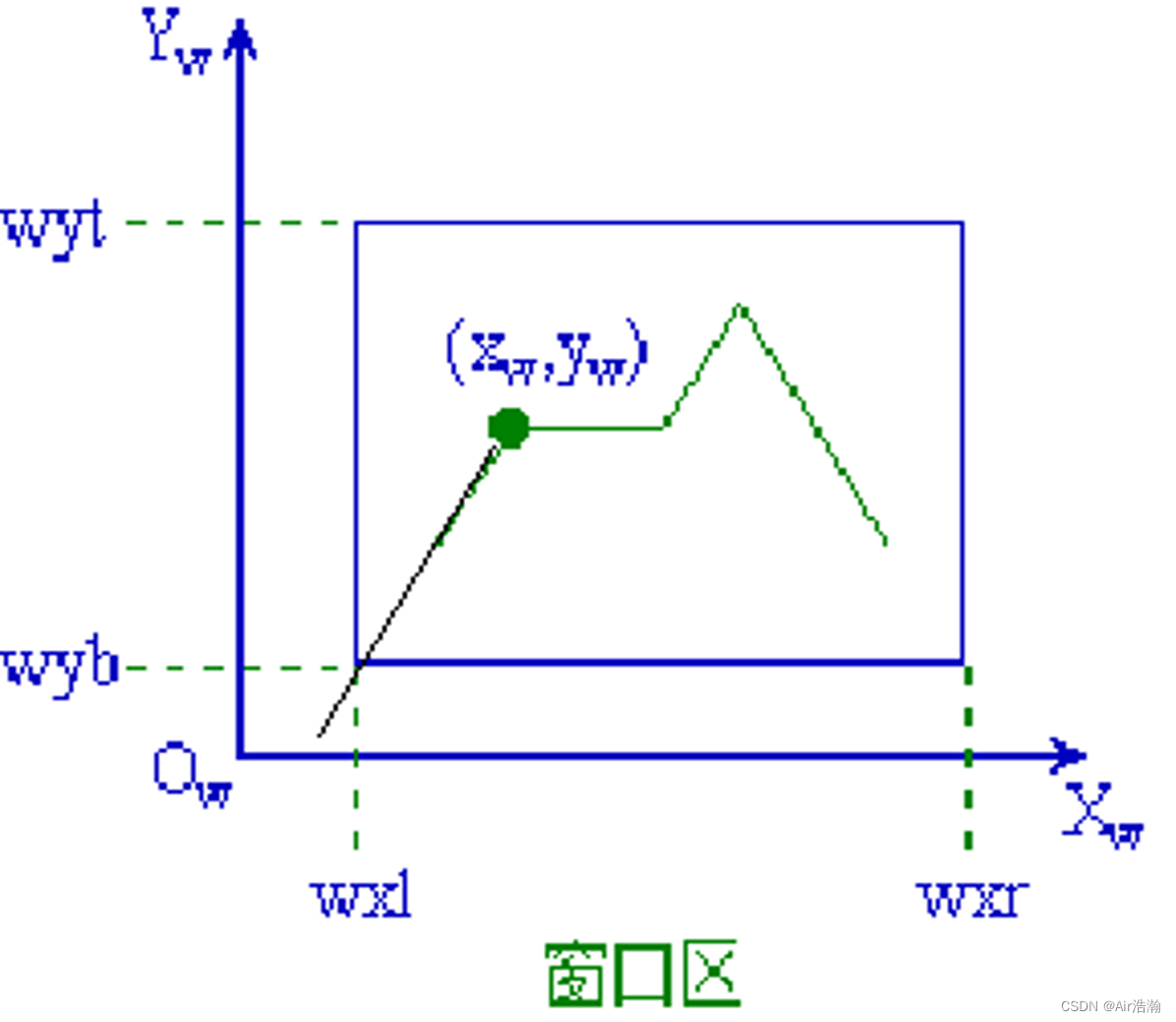 |  |
变换公式: (就很简单的线性变化)(左式可以用右式表示,abcd 的值自己求一下)
{
x
v
−
v
x
l
=
v
x
r
−
v
x
l
w
x
r
−
w
x
l
(
x
w
−
w
x
l
)
y
v
−
v
y
l
=
v
y
r
−
v
y
l
w
y
r
−
w
y
l
(
y
w
−
w
y
l
)
{
x
v
=
a
x
w
+
b
y
v
=
c
y
w
+
d
\left\{\begin{array}{} x_v-vxl=\frac{vxr-vxl}{wxr-wxl}(x_w-wxl) \\ y_v-vyl=\frac{vyr-vyl}{wyr-wyl}(y_w-wyl) \end{array}\right. \quad\quad \left\{\begin{array}{} x_v = ax_w + b \\ y_v = cy_w + d \end{array}\right.
{xv−vxl=wxr−wxlvxr−vxl(xw−wxl)yv−vyl=wyr−wylvyr−vyl(yw−wyl){xv=axw+byv=cyw+d
二维齐次坐标变换
矩阵都要会写,尤其注意错切的变换特点,会画示意图
二位齐次坐标: 矩阵形式如下,每一个部分都有特殊含义:
- [ a b d e ] \begin{bmatrix}a&b\\d&e\end{bmatrix} [adbe] 可以对图形进行 缩放、旋转、对称、错切 等变换
- [ c f ] \begin{bmatrix}c\\f\end{bmatrix} [cf] 是对图形进行 平移 变换
- [ g h ] \begin{bmatrix}g&h\end{bmatrix} [gh] 是对图形作 投影 变换
- [ i ] [i] [i] 是对图形整体进行 缩放 变换

基本变换
平移: [ x ′ y ′ 1 ] = [ 1 0 t x 0 1 t y 0 0 1 ] [ x y 1 ] = [ x + t x y + t y 1 ] = T ( t x , t y ) [ x y 1 ] \begin{bmatrix}x'\\y'\\1\end{bmatrix}= \begin{bmatrix}1&0&t_x\\0&1&t_y\\0&0&1\end{bmatrix} \begin{bmatrix}x\\y\\1\end{bmatrix}= \begin{bmatrix}x+t_x\\y+t_y\\1\end{bmatrix}= T(t_x,t_y)\begin{bmatrix}x\\y\\1\end{bmatrix} x′y′1 = 100010txty1 xy1 = x+txy+ty1 =T(tx,ty) xy1
缩放: [ x ′ y ′ 1 ] = [ s x 0 0 0 s y 0 0 0 1 ] [ x y 1 ] = [ s x x s y y 1 ] = S ( s x , s y ) [ x y 1 ] \begin{bmatrix}x'\\y'\\1\end{bmatrix}= \begin{bmatrix}s_x&0&0\\0&s_y&0\\0&0&1\end{bmatrix} \begin{bmatrix}x\\y\\1\end{bmatrix}= \begin{bmatrix}s_xx\\s_yy\\1\end{bmatrix}= S(s_x,s_y)\begin{bmatrix}x\\y\\1\end{bmatrix} x′y′1 = sx000sy0001 xy1 = sxxsyy1 =S(sx,sy) xy1
旋转:绕原点旋转 θ \theta θ 角: [ x ′ y ′ 1 ] = [ cos θ − sin θ 0 sin θ cos θ 0 0 0 1 ] [ x y 1 ] = [ x cos θ − y sin θ x sin θ + y cos θ 1 ] = R ( θ ) [ x y 1 ] \begin{bmatrix}x'\\y'\\1\end{bmatrix}= \begin{bmatrix}\cos\theta&-\sin\theta&0\\\sin\theta&\cos\theta&0\\0&0&1\end{bmatrix} \begin{bmatrix}x\\y\\1\end{bmatrix}= \begin{bmatrix}x\cos\theta-y\sin\theta\\x\sin\theta+y\cos\theta\\1\end{bmatrix}= R(\theta)\begin{bmatrix}x\\y\\1\end{bmatrix} x′y′1 = cosθsinθ0−sinθcosθ0001 xy1 = xcosθ−ysinθxsinθ+ycosθ1 =R(θ) xy1
(旋转时逆时针 θ \theta θ 为正)
 |  |  |
|---|
对称: [ x ′ y ′ 1 ] = [ a b 0 d e 0 0 0 1 ] [ x y 1 ] = [ a x + b y d x + e y 1 ] \begin{bmatrix}x'\\y'\\1\end{bmatrix}= \begin{bmatrix}a&b&0\\d&e&0\\0&0&1\end{bmatrix} \begin{bmatrix}x&y&1\end{bmatrix}= \begin{bmatrix}ax+by\\dx+ey\\1\end{bmatrix} x′y′1 = ad0be0001 [xy1]= ax+bydx+ey1
- b = d = 0 b=d=0 b=d=0 , a = − 1 a=-1 a=−1 , e = 1 e=1 e=1 时,关于 y y y 轴对称
- b = d = 0 b=d=0 b=d=0 , a = 1 a=1 a=1 , e = − 1 e=-1 e=−1 时,关于 x x x 轴对称
- b = d = 0 b=d=0 b=d=0 , a = e = − 1 a=e=-1 a=e=−1 时,关于原点对称
- b = d = 1 b=d=1 b=d=1 , a = e = 0 a=e=0 a=e=0 时,关于 y = x y=x y=x 对称
- b = d = − 1 b=d=-1 b=d=−1 , a = e = 0 a=e=0 a=e=0 时,关于 y = − x y=-x y=−x 对称
错切: [ x ′ y ′ 1 ] = [ 1 b 0 d 1 0 0 0 1 ] [ x y 1 ] = [ x + b y d x + y 1 ] \begin{bmatrix}x'\\y'\\1\end{bmatrix}= \begin{bmatrix}1&b&0\\d&1&0\\0&0&1\end{bmatrix} \begin{bmatrix}x&y&1\end{bmatrix}= \begin{bmatrix}x+by\\dx+y\\1\end{bmatrix} x′y′1 = 1d0b10001 [xy1]= x+bydx+y1
- 当 d = 0 d=0 d=0 时,图形 y y y 坐标不变, x x x 坐标随初值和变换系数 b b b 作线性变化(skewX)
- 当 b = 0 b=0 b=0 时,图形 x x x 坐标不变, y y y 坐标随初值和变换系数 d d d 作线性变化(skewY)
 |  |  |
|---|
复合变换
注意矩阵乘法的顺序
复合平移: 就是两次平移加起来
T
(
t
x
2
,
t
y
2
)
T
(
t
x
1
,
t
y
1
)
=
[
1
0
t
x
2
0
1
t
y
2
0
0
1
]
[
1
0
t
x
1
0
1
t
y
1
0
0
1
]
=
[
1
0
t
x
2
+
t
x
1
0
1
t
y
2
+
t
y
1
0
0
1
]
=
T
(
t
x
2
+
t
x
1
,
t
y
2
+
t
y
1
)
T(t_{x2},t_{y2})T(t_{x1},t_{y1})= \begin{bmatrix}1&0&t_{x2}\\0&1&t_{y2}\\0&0&1\end{bmatrix}\begin{bmatrix}1&0&t_{x1}\\0&1&t_{y1}\\0&0&1\end{bmatrix}= \begin{bmatrix}1&0&t_{x2}+t_{x1}\\0&1&t_{y2}+t_{y1}\\0&0&1\end{bmatrix}= T(t_{x2}+t_{x1},t_{y2}+t_{y1})
T(tx2,ty2)T(tx1,ty1)=
100010tx2ty21
100010tx1ty11
=
100010tx2+tx1ty2+ty11
=T(tx2+tx1,ty2+ty1)
复合缩放:就是两次缩放相乘
S
(
s
x
2
,
s
y
2
)
S
(
s
x
1
,
s
y
1
)
=
[
s
x
2
0
0
0
s
y
2
0
0
0
1
]
[
s
x
1
0
0
0
s
y
1
0
0
0
1
]
=
[
s
x
2
s
x
1
0
0
0
s
y
2
s
y
1
0
0
0
1
]
=
S
(
s
x
2
s
x
1
,
s
y
2
s
y
1
)
S(s_{x2},s_{y2})S(s_{x1},s_{y1})= \begin{bmatrix}s_{x2}&0&0\\0&s_{y2}&0\\0&0&1\end{bmatrix} \begin{bmatrix}s_{x1}&0&0\\0&s_{y1}&0\\0&0&1\end{bmatrix}= \begin{bmatrix}s_{x2}s_{x1}&0&0\\0&s_{y2}s_{y1}&0\\0&0&1\end{bmatrix}= S(s_{x2}s_{x1},s_{y2}s_{y1})
S(sx2,sy2)S(sx1,sy1)=
sx2000sy20001
sx1000sy10001
=
sx2sx1000sy2sy10001
=S(sx2sx1,sy2sy1)
复合旋转: 就是两次的角度相加
R
(
θ
1
)
R
(
θ
2
)
=
[
cos
θ
1
−
sin
θ
1
0
sin
θ
1
cos
θ
1
0
0
0
1
]
[
cos
θ
2
−
sin
θ
2
0
sin
θ
2
cos
θ
2
0
0
0
1
]
=
[
cos
(
θ
1
+
θ
2
)
−
sin
(
θ
1
+
θ
2
)
0
sin
(
θ
1
+
θ
2
)
cos
(
θ
1
+
θ
2
)
0
0
0
1
]
=
R
(
θ
1
+
θ
2
)
R(\theta_1)R(\theta_2)= \begin{bmatrix}\cos\theta_1&-\sin\theta_1&0\\\sin\theta_1&\cos\theta_1&0\\0&0&1\end{bmatrix} \begin{bmatrix}\cos\theta_2&-\sin\theta_2&0\\\sin\theta_2&\cos\theta_2&0\\0&0&1\end{bmatrix}= \begin{bmatrix}\cos(\theta_1+\theta_2)&-\sin(\theta_1+\theta_2)&0\\\sin(\theta_1+\theta_2)&\cos(\theta_1+\theta_2)&0\\0&0&1\end{bmatrix}= R(\theta_1+\theta_2)
R(θ1)R(θ2)=
cosθ1sinθ10−sinθ1cosθ10001
cosθ2sinθ20−sinθ2cosθ20001
=
cos(θ1+θ2)sin(θ1+θ2)0−sin(θ1+θ2)cos(θ1+θ2)0001
=R(θ1+θ2)
参考点变换: 以上缩放和旋转变换操作都是相对于原点的,如果要相对于任意参考点
(
x
f
,
y
f
)
(x_f,y_f)
(xf,yf) ,则可以先平移到原点,再进行缩放、旋转变换,最后平移回去,即:(变换的顺序要从右到左看这个矩阵)
S
(
x
f
,
y
f
;
s
x
,
s
y
)
=
T
(
x
f
,
y
f
)
S
(
s
x
,
s
y
)
T
(
−
x
f
,
−
y
f
)
=
[
s
x
0
x
f
(
1
−
s
x
)
0
s
y
y
f
(
1
−
s
y
)
0
0
1
]
R
(
x
f
,
y
f
;
θ
)
=
T
(
x
f
,
y
f
)
R
(
θ
)
T
(
−
x
f
,
−
y
f
)
=
[
cos
θ
−
sin
θ
x
f
(
1
−
cos
θ
)
+
y
f
sin
θ
sin
θ
cos
θ
y
f
(
1
−
cos
θ
)
+
x
f
s
i
n
θ
0
0
1
]
S(x_f,y_f;s_x,s_y)=T(x_f,y_f)S(s_x,s_y)T(-x_f,-y_f)=\begin{bmatrix}s_x&0&x_f(1-s_x)\\0&s_y&y_f(1-s_y)\\0&0&1\end{bmatrix} \\ R(x_f,y_f;\theta)=T(x_f,y_f)R(\theta)T(-x_f,-y_f)=\begin{bmatrix}\cos\theta&-\sin\theta&x_f(1-\cos\theta)+y_f\sin\theta\\\sin\theta&\cos\theta&y_f(1-\cos\theta)+x_fsin\theta\\0&0&1\end{bmatrix}
S(xf,yf;sx,sy)=T(xf,yf)S(sx,sy)T(−xf,−yf)=
sx000sy0xf(1−sx)yf(1−sy)1
R(xf,yf;θ)=T(xf,yf)R(θ)T(−xf,−yf)=
cosθsinθ0−sinθcosθ0xf(1−cosθ)+yfsinθyf(1−cosθ)+xfsinθ1
三维齐次坐标变换
经常考绕空间中任意轴旋转
三位齐次坐标: 矩阵形式如下,每一个部分都有特殊含义:
- [ a 11 a 12 a 13 a 21 a 22 a 23 a 31 a 32 a 33 ] \begin{bmatrix}a_{11}&a_{12}&a_{13}\\a_{21}&a_{22}&a_{23}\\a_{31}&a_{32}&a_{33}\end{bmatrix} a11a21a31a12a22a32a13a23a33 可以对图形进行 缩放、旋转、错切 等变换
- [ a 14 a 24 a 34 ] \begin{bmatrix}a_{14}\\a_{24}\\a_{34}\end{bmatrix} a14a24a34 是对图形进行 平移 变换
- [ a 41 a 42 a 43 ] \begin{bmatrix}a_{41}&a_{42}&a_{43}\end{bmatrix} [a41a42a43] 是对图形作 投影 变换
- [ a 44 ] [a_{44}] [a44] 是对图形整体进行 缩放 变换

平移: [ x ′ y ′ z ′ 1 ] = [ 1 0 0 t x 0 1 0 t y 0 0 1 t z 0 0 0 1 ] [ x y z 1 ] = [ x + t x y + t y z + t z 1 ] = T ( t x , t y , t z ) [ x y z 1 ] \begin{bmatrix}x'\\y'\\z'\\1\end{bmatrix}= \begin{bmatrix}1&0&0&t_x\\0&1&0&t_y\\0&0&1&t_z\\0&0&0&1\end{bmatrix} \begin{bmatrix}x\\y\\z\\1\end{bmatrix}= \begin{bmatrix}x+t_x\\y+t_y\\z+t_z\\1\end{bmatrix}= T(t_x,t_y,t_z)\begin{bmatrix}x\\y\\z\\1\end{bmatrix} x′y′z′1 = 100001000010txtytz1 xyz1 = x+txy+tyz+tz1 =T(tx,ty,tz) xyz1
缩放: [ x ′ y ′ z ′ 1 ] = [ s x 0 0 0 0 s y 0 0 0 0 s z 0 0 0 0 0 ] [ x y z 1 ] = [ s x x s y y s z z 1 ] = S ( s x , s y , s z ) [ x y z 1 ] \begin{bmatrix}x'\\y'\\z'\\1\end{bmatrix}= \begin{bmatrix}s_x&0&0&0\\0&s_y&0&0\\0&0&s_z&0\\0&0&0&0\end{bmatrix} \begin{bmatrix}x\\y\\z\\1\end{bmatrix}= \begin{bmatrix}s_xx\\s_yy\\s_zz\\1\end{bmatrix}= S(s_x,s_y,s_z)\begin{bmatrix}x\\y\\z\\1\end{bmatrix} x′y′z′1 = sx0000sy0000sz00000 xyz1 = sxxsyyszz1 =S(sx,sy,sz) xyz1
参考点变换:参照
(
x
f
,
y
f
,
z
f
)
(x_f,y_f,z_f)
(xf,yf,zf) 缩放:
S
(
x
f
,
y
f
,
z
f
;
s
x
,
s
y
,
s
z
)
=
T
(
x
f
,
y
f
,
z
f
)
S
(
s
x
,
s
y
,
s
z
)
T
(
−
x
f
,
−
y
f
,
−
z
f
)
=
[
s
x
0
0
x
f
(
1
−
s
x
)
0
s
y
0
y
f
(
1
−
s
y
)
0
0
s
z
z
f
(
1
−
s
z
)
0
0
0
1
]
S(x_f,y_f,z_f;s_x,s_y,s_z)=T(x_f,y_f,z_f)S(s_x,s_y,s_z)T(-x_f,-y_f,-z_f)=\begin{bmatrix}s_x&0&0&x_f(1-s_x)\\0&s_y&0&y_f(1-s_y)\\0&0&s_z&z_f(1-s_z)\\0&0&0&1\end{bmatrix}
S(xf,yf,zf;sx,sy,sz)=T(xf,yf,zf)S(sx,sy,sz)T(−xf,−yf,−zf)=
sx0000sy0000sz0xf(1−sx)yf(1−sy)zf(1−sz)1
旋转:绕某一轴旋转
θ
\theta
θ 角
-
绕 x x x 轴旋转: [ x ′ y ′ z ′ 1 ] = [ 1 0 0 0 0 cos θ − sin θ 0 0 sin θ cos θ 0 0 0 0 1 ] [ x y z 1 ] = R x ( θ ) [ x y z 1 ] \begin{bmatrix}x'\\y'\\z'\\1\end{bmatrix}= \begin{bmatrix}1&0&0&0\\0&\cos\theta&-\sin\theta&0\\0&\sin\theta&\cos\theta&0\\0&0&0&1\end{bmatrix} \begin{bmatrix}x\\y\\z\\1\end{bmatrix}= R_x(\theta)\begin{bmatrix}x\\y\\z\\1\end{bmatrix} x′y′z′1 = 10000cosθsinθ00−sinθcosθ00001 xyz1 =Rx(θ) xyz1
-
绕 y y y 轴旋转: [ x ′ y ′ z ′ 1 ] = [ cos θ 0 sin θ 0 0 1 0 0 − sin θ 0 cos θ 0 0 0 0 1 ] [ x y z 1 ] = R y ( θ ) [ x y z 1 ] \begin{bmatrix}x'\\y'\\z'\\1\end{bmatrix}= \begin{bmatrix}\cos\theta&0&\sin\theta&0\\0&1&0&0\\-\sin\theta&0&\cos\theta&0\\0&0&0&1\end{bmatrix} \begin{bmatrix}x\\y\\z\\1\end{bmatrix}= R_y(\theta)\begin{bmatrix}x\\y\\z\\1\end{bmatrix} x′y′z′1 = cosθ0−sinθ00100sinθ0cosθ00001 xyz1 =Ry(θ) xyz1
-
绕 z z z 轴旋转: [ x ′ y ′ z ′ 1 ] = [ cos θ − sin θ 0 0 sin θ cos θ 0 0 0 0 1 0 0 0 0 1 ] [ x y z 1 ] = R x ( θ ) [ x y z 1 ] \begin{bmatrix}x'\\y'\\z'\\1\end{bmatrix}= \begin{bmatrix}\cos\theta&-\sin\theta&0&0\\\sin\theta&\cos\theta&0&0\\0&0&1&0\\0&0&0&1\end{bmatrix} \begin{bmatrix}x\\y\\z\\1\end{bmatrix}= R_x(\theta)\begin{bmatrix}x\\y\\z\\1\end{bmatrix} x′y′z′1 = cosθsinθ00−sinθcosθ0000100001 xyz1 =Rx(θ) xyz1
-
绕任意轴旋转:旋转轴 A B AB AB 由 A ( x a , y a , z a ) A(x_a,y_a,z_a) A(xa,ya,za) 和方向 ( a , b , c ) (a,b,c) (a,b,c) 定义:
- 先将坐标原先移动到 A A A 点,
- 使 A B AB AB 绕 x x x 和 y y y 轴分别旋转 α \alpha α 角和 β \beta β 角,使得 A B AB AB 与 z z z 轴重合(其中 α \alpha α 和 β \beta β 分别为 A B AB AB 在 YOZ 平面和 XOZ 平面与 Z 轴的夹角)
- 将 P P P 绕 z z z 轴旋转 θ \theta θ 角
- 做上述变换的逆变换
R A B = T A R x R y R z R y − 1 R x − 1 T A − 1 R_{AB}=T_AR_xR_yR_zR_y^{-1}R_x^{-1}T_A^{-1} RAB=TARxRyRzRy−1Rx−1TA−1
投影变换
画三视图考过简答题
投影变换的类别:

正平行投影:投影方向垂直于投影平面的平行投影,即三视图,按照如下顺序,主视图 y = 0 y =0 y=0 ,侧视图 x = 0 x=0 x=0 ,俯视图 z = 0 z=0 z=0 :

给出图片,算斜平面投影公式
斜平行投影:投影方向不垂直于投影平面的平行投影;下图中观察平面为 z = 0 z=0 z=0 ,点 ( x , y ) (x,y) (x,y) 为点 ( x , y , z ) (x,y,z) (x,y,z) 再观察平面上的正平行投影坐标(即 $(x,y,z)\to(x,y)\bot z=0 $),点 ( x ′ , y ′ ) (x',y') (x′,y′) 为斜投影坐标, ( x , y ) (x,y) (x,y) 与 ( x ′ , y ′ ) (x',y') (x′,y′) 的距离为 L L L :(这里最好想象成 ( x , y , z ) (x,y,z) (x,y,z) 的 z z z 是正的)

有
x
′
=
x
+
L
cos
α
x'=x+L\cos\alpha
x′=x+Lcosα ,
y
′
=
y
+
L
sin
α
y'=y+L\sin\alpha
y′=y+Lsinα ;而
z
=
L
tan
β
z=L\tan\beta
z=Ltanβ ,故
x
′
=
x
+
z
tan
β
cos
α
x'=x+\frac{z}{\tan\beta}\cos\alpha
x′=x+tanβzcosα ,
y
′
=
y
+
z
tan
β
sin
α
y'=y+\frac{z}{\tan\beta}\sin\alpha
y′=y+tanβzsinα ;令
l
1
=
1
tan
β
l_1=\frac{1}{\tan\beta}
l1=tanβ1 ,则:
[
x
′
y
′
z
′
1
]
=
[
1
0
l
1
cos
α
0
0
1
l
1
sin
α
0
0
0
0
0
0
0
0
1
]
[
x
y
z
1
]
\begin{bmatrix}x'\\y'\\z'\\1\end{bmatrix}= \begin{bmatrix} 1 & 0 & l_1\cos\alpha & 0 \\ 0 & 1 & l_1\sin\alpha & 0 \\ 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 1 \\ \end{bmatrix} \begin{bmatrix}x\\y\\z\\1\end{bmatrix}
x′y′z′1
=
10000100l1cosαl1sinα000001
xyz1
透视投影:视线(投影线)是从视点(观察点)出发,视线是不平行的。
- 灭点:不平行于投影平面的视线汇聚的一点称为灭点,在坐标轴上的灭点叫做主灭点。
- 类别:按照主灭点的个数分为:

按照以下图示,根据相似三角形的比例关系可以得到:

x
′
=
x
(
d
p
z
p
r
p
−
z
)
y
′
=
y
(
d
p
z
p
r
p
−
z
)
x'=x(\frac{d_p}{z_{prp}-z})\quad\quad y'=y(\frac{d_p}{z_{prp}-z})
x′=x(zprp−zdp)y′=y(zprp−zdp)
用齐次坐标表示为:
[
x
h
y
h
z
h
h
]
=
[
1
0
0
0
0
1
0
0
0
0
−
z
v
p
/
d
p
z
v
p
(
z
p
r
p
/
d
p
)
0
0
−
1
/
d
p
z
p
r
p
/
d
p
]
=
[
x
y
z
1
]
\begin{bmatrix}x_h\\y_h\\z_h\\h\end{bmatrix}= \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & -z_{vp}/d_p & z_{vp}(z_{prp}/d_p) \\ 0 & 0 & -1/d_p & z_{prp}/d_p \\ \end{bmatrix}= \begin{bmatrix}x\\y\\z\\1\end{bmatrix}
xhyhzhh
=
1000010000−zvp/dp−1/dp00zvp(zprp/dp)zprp/dp
=
xyz1
其中
h
=
z
p
r
p
−
z
d
p
h=\frac{z_{prp}-z}{d_p}
h=dpzprp−z (这里
x
h
x_h
xh 等并不是投影过后的坐标;投影过后的坐标应该是
x
′
=
x
h
h
x'=\frac{x_h}{h}
x′=hxh )



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











