




 本文详细解析了Linux内核中的实时调度类,包括sched_rt_entity数据结构、rt_sched_class数据结构以及与SMP(对称多处理器)和NUMA(非一致性内存访问)架构相关的功能。介绍了enqueue_task,pick_next_task等关键函数在进程调度中的作用。
本文详细解析了Linux内核中的实时调度类,包括sched_rt_entity数据结构、rt_sched_class数据结构以及与SMP(对称多处理器)和NUMA(非一致性内存访问)架构相关的功能。介绍了enqueue_task,pick_next_task等关键函数在进程调度中的作用。
文章目录

一、 实时调度类分析
1.1 实时调度实体sched_rt_entity数据结构
表示实时调度实体,包含整个实时调度数据信息。具体内核源码如下:
// 表示实时调度实体
struct sched_rt_entity {
struct list_head run_list; // 用于加入优先级队列当中
unsigned long timeout; // 设置时间超时
unsigned long watchdog_stamp; // 记录jiffies值
unsigned int time_slice; // 记录时间片
unsigned short on_rq;
unsigned short on_list;
struct sched_rt_entity *back; // 临时用于从上往下连接RT调度实体
#ifdef CONFIG_RT_GROUP_SCHED
struct sched_rt_entity *parent; // 指向父RT调度实体
/* rq on which this entity is (to be) queued: */
// rt_rq:实时类
struct rt_rq *rt_rq; // RT调度实体所属实时运行队列,被调度
/* rq "owned" by this entity/group: */
struct rt_rq *my_q; // RT调度实体拥有的实时调度队列,用于管理子任务或子组任务
#endif
} __randomize_layout;
1.2 实时调度类rt_sched_class数据结构
数据结构内核源码如下:
const struct sched_class rt_sched_class = {
.next = &fair_sched_class,
.enqueue_task = enqueue_task_rt, // 将task存放到就绪队列或者尾部
.dequeue_task = dequeue_task_rt, // 将task从就绪队列末尾删除
.yield_task = yield_task_rt, // 主动放弃执行
.check_preempt_curr = check_preempt_curr_rt,
.pick_next_task = pick_next_task_rt, // 核心调度器,从就绪队列中选择一个执行
.put_prev_task = put_prev_task_rt, // 当任务将要被调度出时执行
.set_next_task = set_next_task_rt,
#ifdef CONFIG_SMP
.balance = balance_rt,
.select_task_rq = select_task_rq_rt,
.set_cpus_allowed = set_cpus_allowed_common,
.rq_online = rq_online_rt,
.rq_offline = rq_offline_rt,
.task_woken = task_woken_rt,
.switched_from = switched_from_rt,
#endif
.task_tick = task_tick_rt,
.get_rr_interval = get_rr_interval_rt,
.prio_changed = prio_changed_rt,
.switched_to = switched_to_rt,
.update_curr = update_curr_rt,
#ifdef CONFIG_UCLAMP_TASK
.uclamp_enabled = 1,
#endif
};
1.3 实时调度类功能函数
- 插入进程:enqueue_task_rt(…) -> ,源码如下:
/*
* Adding/removing a task to/from a priority array:
* 更新调度信息,将调度实体插入到相应优先级队列末尾
*/
static void
enqueue_task_rt(struct rq *rq, struct task_struct *p, int flags)
{
struct sched_rt_entity *rt_se = &p->rt;
if (flags & ENQUEUE_WAKEUP)
rt_se->timeout = 0;
enqueue_rt_entity(rt_se, flags);
if (!task_current(rq, p) && p->nr_cpus_allowed > 1)
enqueue_pushable_task(rq, p);
}
- 选择进程:pick_next_rt_entity(…),实时调度会选择最高优先级的实时进程来运行,源码如下:
static struct sched_rt_entity *pick_next_rt_entity(struct rq *rq,
struct rt_rq *rt_rq)
{
struct rt_prio_array *array = &rt_rq->active;
struct sched_rt_entity *next = NULL;
struct list_head *queue;
int idx;
// 首先找到一个可用实体
idx = sched_find_first_bit(array->bitmap);
BUG_ON(idx >= MAX_RT_PRIO);
// 从链表组中找对对应链表
queue = array->queue + idx;
next = list_entry(queue->next, struct sched_rt_entity, run_list);
return next; // 返回找到的运行实体
}
- 删除进程:dequeue_task_rt(…),从优先级队列中删除实时进程,并更新调度信息,然后把这个进程添加到队尾。源码如下:
// 删除进程
static void dequeue_task_rt(struct rq *rq, struct task_struct *p, int flags)
{
struct sched_rt_entity *rt_se = &p->rt;
update_curr_rt(rq); // 更新调度数据信息等等
dequeue_rt_entity(rt_se, flags); // 将rt_se从运行队列中删除,然后添加到队列尾部
dequeue_pushable_task(rq, p); // 从hash表中进行删除
}
二、SMP和NUMA
2.1 SMP(多对称处理器结构,UMA)
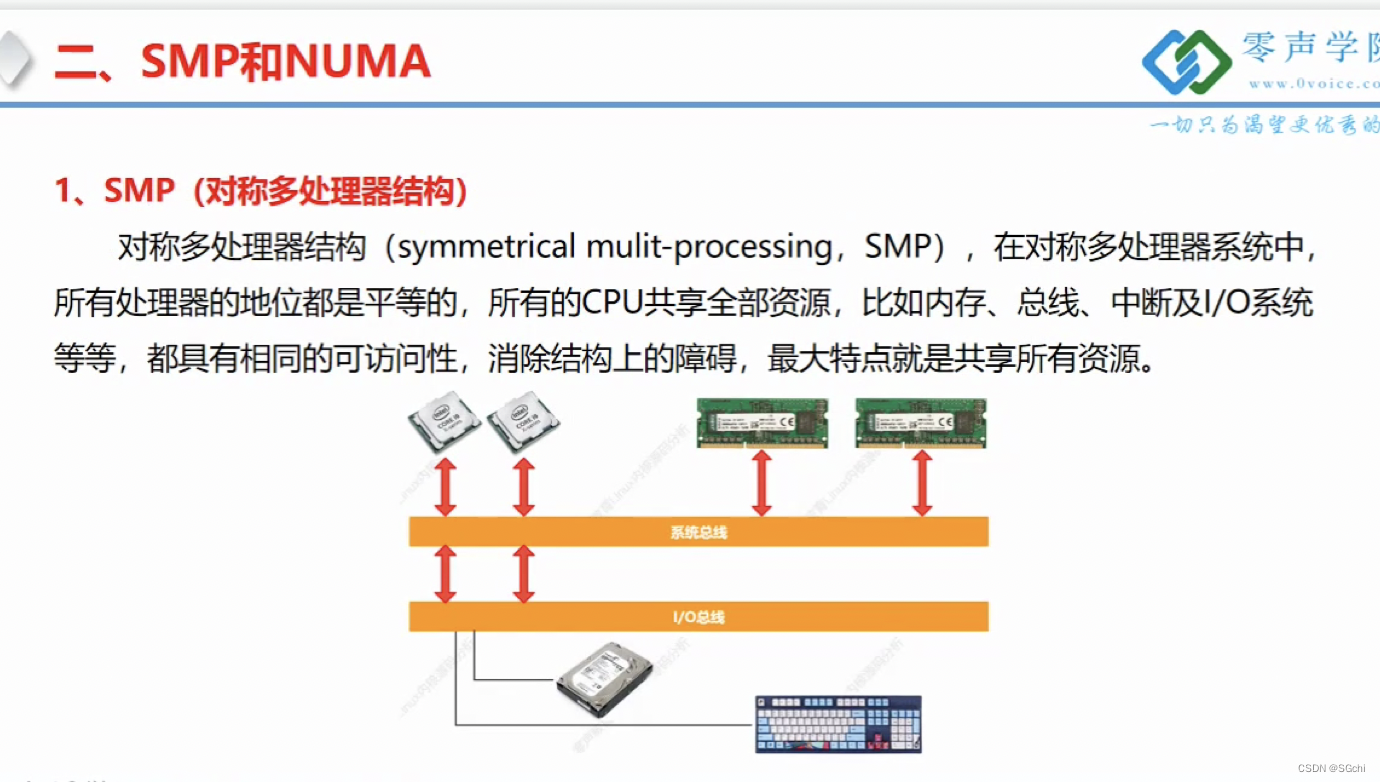
实践证明SMP服务器CPU利用率最高是2-4个CPU
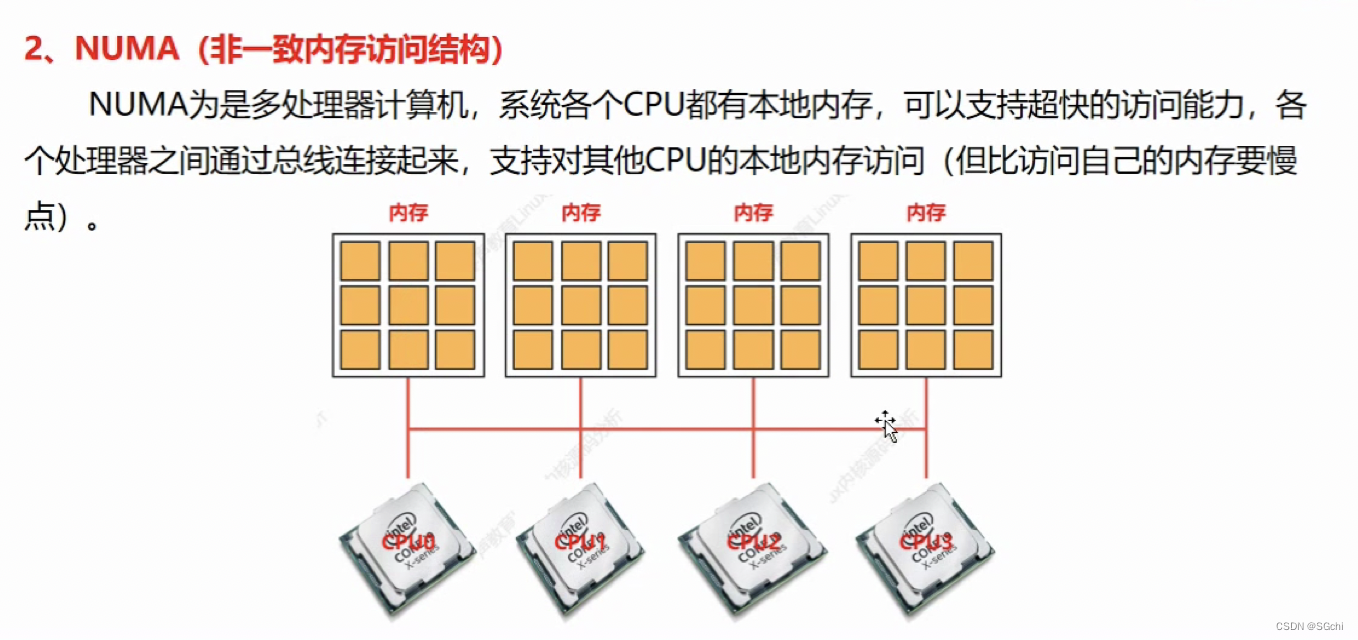
2.2 NUMA(非一致内存访问结构)
2.3 CPU域初始化
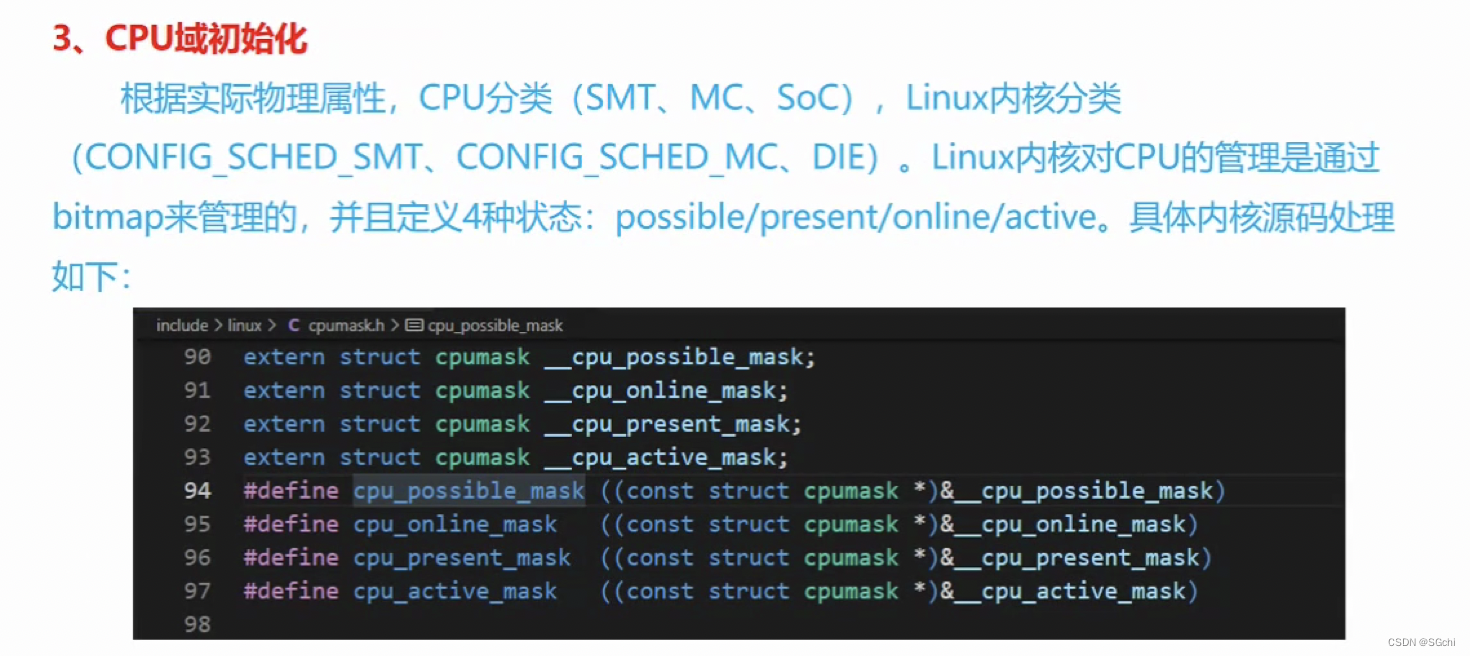
extern struct cpumask __cpu_possible_mask;
extern struct cpumask __cpu_online_mask;
extern struct cpumask __cpu_present_mask;
extern struct cpumask __cpu_active_mask;
// 表示有多少可以执行的CPU核心
#define cpu_possible_mask ((const struct cpumask *)&__cpu_possible_mask)
// 表示有多少正处于运行状态的CPU核心
#define cpu_online_mask ((const struct cpumask *)&__cpu_online_mask)
// 表示有多少个具备online条件的CPU核心(不一定都处于online状态,有的CPU核心可能被热插拔)
#define cpu_present_mask ((const struct cpumask *)&__cpu_present_mask)
// 表示系统中有多少个活跃的CPU核心
#define cpu_active_mask ((const struct cpumask *)&__cpu_active_mask)

















 635
635

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









