







文章目录
Opencv 官网下载链接: https://opencv.org/releases/
一、 效果(版本2的效果)
手部模型不需要自己再去训练,Opencv封装好了训练模型。
封装好的文件模型如下(记得当时是找了很久才找到在哪里,所以当时找到了专门建了一个文件夹):

我自己的Opencv是4.x版本的,这些xml文件具体在:
D:\Opencv\opencv\sources\data\haarcascades_cuda
可以使用文件搜索:

如果找不到下面有链接。
百度网盘连接提取码:2apc

下面是我的关于Opencv的手势识别代码模型。
二、全部源码
版本1:未封装代码
这个代码可以复制后直接运行,看出效果的。
#!/usr/bin/python3.7
# coding=utf-8
import cv2
import mediapipe as mp
import time
# 导入opencv模块
# 捕捉帧,笔记本摄像头设置为0即可
""" VideoCapture第一个参数就是摄像头编号"""
capture =cv2.VideoCapture(0,cv2.CAP_DSHOW)
# 初始化(模型使用之前)
mpHands =mp.solutions.hands
hands=mpHands.Hands()
mpDraw=mp.solutions.drawing_utils
pTime=0
cTime=0
# 循环显示帧
while True :
success, img = capture.read()
imgRGB=cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
results=hands.process(imgRGB)
"""在显示图片之前,我们需要对图像进行一些处理"""
# 下面这个函数,当手放入摄像头范围内,就会返回相应的Landmark值,否则返回的是None
#print(results.multi_hand_landmarks)
# 输出手的每个坐标(一只手几十个点)
if results.multi_hand_landmarks:
print("读取成功!")
for handLms in results.multi_hand_landmarks:
for id, lm in enumerate(handLms.landmark):
print(id,lm)
mpDraw.draw_landmarks(img, handLms,mpHands.HAND_CONNECTIONS) # 第三个参数的意思是,让手中的节点连接。
cv2.imshow('Carmer', img)
if cv2.waitKey(1) == ord('q'): # 按Q退出
break
版本2:封装好的代码
这个代码是封装好的,都后面如果需要就是直接引用。不过也可以直接运行这个程序,也同样能出结果。
import cv2
import mediapipe as mp
import time
class handDetector():
def __init__(self, mode=False, maxHands=2, detectionCon=0.5, trackCon=0.5):
self.mode = mode
self.maxHands = maxHands
self.detectionCon = detectionCon
self.trackCon = trackCon
self.mpHands = mp.solutions.hands
self.hands = self.mpHands.Hands(self.mode, self.maxHands,
self.detectionCon, self.trackCon)
self.mpDraw = mp.solutions.drawing_utils
def findHands(self, img, draw=True):
imgRGB = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
self.results = self.hands.process(imgRGB)
# print(results.multi_hand_landmarks)
if self.results.multi_hand_landmarks:
for handLms in self.results.multi_hand_landmarks:
if draw:
self.mpDraw.draw_landmarks(img, handLms,
self.mpHands.HAND_CONNECTIONS)
return img
def findPosition(self, img, handNo=0, draw=True):
lmList = []
if self.results.multi_hand_landmarks:
myHand = self.results.multi_hand_landmarks[handNo]
for id, lm in enumerate(myHand.landmark):
# print(id, lm)
h, w, c = img.shape
cx, cy = int(lm.x * w), int(lm.y * h)
# print(id, cx, cy)
lmList.append([id, cx, cy])
# if draw: 这部分代码画出了手上所有结点,因为比较难看,就注释掉了。
# cv2.circle(img, (cx, cy), 15, (255, 0, 255), cv2.FILLED)
return lmList
def main():
pTime = 0
cTime = 0
cap = cv2.VideoCapture(0)
detector = handDetector()
while True:
success, img = cap.read()
img = detector.findHands(img)
lmList = detector.findPosition(img)
if len(lmList) != 0:
print(lmList[4])
cTime = time.time()
fps = 1 / (cTime - pTime)
pTime = cTime
cv2.putText(img, str(int(fps)), (10, 70), cv2.FONT_HERSHEY_PLAIN, 3,
(255, 0, 255), 3)
cv2.imshow("Image", img)
cv2.waitKey(1)
if __name__ == "__main__":
main()
同时打印出了手上的每个结点的位置变化。
三、 开发工具
Pycharm2021,Python3.7 .
四、 遇到的问题记录
1. error: (-215:Assertion failed) !_src.empty() in function ‘cv::cvtColor’
报错:
imgRGB = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
cv2.error: OpenCV(4.5.3) C:\Users\runneradmin\AppData\Local\Temp\pip-req-build-_xlv4eex\opencv\modules\imgproc\src\color.cpp:182: error: (-215:Assertion failed) !_src.empty() in function ‘cv::cvtColor’
这个问题,网上的一些解释是,如果你导入的是一个静态图片,那么要么是你的斜杠写错,
或者是你的路径中有中文,不妨换个没有中文的路径,或者修改图片为英文试试。
但是我这里是摄像头
解决方案:修改摄像头参数
cap = cv2.VideoCapture(1) #这个是B站源码中的摄像头编号
可能是获取摄像头参数出错,修改摄像头编号为0。运行即可。
cap = cv2.VideoCapture(0)
2. 使用pip指令,下载opencv-python,numpy等报错
在控制台上使用pip指令下载是,经常碰到超时问题,本身文件不大,但是你的下载速度只有12kb/s甚至只有几kb每秒
遇到的问题例如下面这个:

其实这个问题就是因为你的下载速度太慢导致的。
解决方案:使用国内镜像安装
这时候,考虑使用国内镜像安装,会快很多。.点击进入国内镜像安装教程
一般numpy,opencv-python都有国内镜像。不过我安装mediatepipe时,并没有找到国内镜像,但是控制台cmd使用下面这个指令太慢了。也是只有几kb/s
pip install mediapipe
所以我选择了去PyCharm去下载:
方式:
File—>Setting—>Project:python-project-Python Interpreter(Python解释器)


点击“+”,添加解释器,然后在搜索框中搜索你需要的package即可。opencv-python,numpy,mediapipe都可以直接搜到。

点击下面的Install Package即可。
3.`anonymous-namespace’::SourceReaderCB::~SourceReaderCB terminating async callback
ValueError: could not broadcast input array from shape (656,396,3) into shape (200,200,3)
[ WARN:1] global C:\Users\runneradmin\AppData\Local\Temp\pip-req-build-_xlv4eex\opencv\modules\videoio\src\cap_msmf.cpp (438) `anonymous-namespace’::SourceReaderCB::~SourceReaderCB terminating async callback
原代码:
cap =cv2.VideoCapture(0)
修改成下面的:
cap =cv2.VideoCapture(0,cv2.CAP_DSHOW)
五、附录:关于Android中使用机器学习套件
现在做的项目需要把OpenCV部署到 Android 端,其实Opencv有专门为Android设计的函数库,但是上手慢,安装比较复杂。这里推荐用华为HMS Core 中的 机器学习服务
HMS Core是华为终端云服务(HUAWEI Mobile Services)开放能力合集,位于开发者应用与操作系统之间,是为应用开发提供基础服务的平台。同时,依托华为云服务,HMS Core也为这些服务提供云端能力,用于各服务的开通、业务实现及运营,如下图所示。



具体HMS Core 服务信息点击这个链接 :HMS Core 服务官方文档
对于新手来说,上手很方便,在我的项目里面主要用于康复训练姿势识别。这里给出几个项目的运行截图
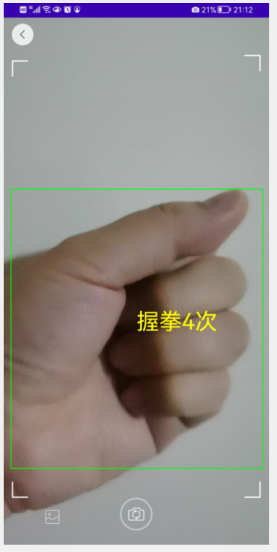
从开发者来讲,HMS Core ML Kit使用起来十分方便,其中还有很多姿势识别,这里只是列举了手势识别的效果。这款APP全部由我一人开发完成,时间原因只能做一些简单的姿势。
HMS Core ML Kit 机器学习套件 相关网址:
想直接看机器学习的点击第三个链接就是源代码部分。
先根据官方文档注册成为开发者,后续使用直接下载Gitee ZIP文件,然后将下载下来的压缩包解压成文件夹,直接解压放到桌面上也行,然后用Android Studio 直接打开本地文件直接运行就可以使用了。
注意:HMS Core中的姿态识别需要在真机调试。
由于本人使用的就是华为手机(鸿蒙操作系统),所以把项目运行在我的手机上时可以直接用,但是别的牌子手机可能就需要安装 HMS Core 终端服务了。.
















 3290
3290











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











