






基于S7-200 PLC和组态王机械手搬运控制系统
带解释的梯形图程序,接线图原理图图纸,io分配,组态画面
ID:6358673867113925
Holly123~
本文将围绕基于S7-200 PLC和组态王机械手搬运控制系统展开,详细介绍其梯形图程序、接线图原理图图纸、IO分配以及组态画面等关键内容。
一、梯形图程序
梯形图程序是PLC程序设计中常用的一种编程方法。对于基于S7-200 PLC的机械手搬运控制系统,我们需要编写相应的梯形图程序来实现其功能。在本系统中,梯形图程序主要用于控制机械手的运动轨迹、抓取和释放动作等。本文将详细介绍该梯形图程序的编写步骤,并对每一步进行解释和分析。
二、接线图原理图图纸
接线图原理图图纸是机械手搬运控制系统设计中必不可少的一环。它们提供了系统各个部分的接线方式和电气原理图。本文将详细介绍接线图原理图图纸的绘制过程,并解释其中的各个元件、电气符号和连接方式,以便读者能够全面理解系统的电气设计。
三、IO分配
IO分配是指将PLC的输入输出口与系统中的传感器和执行器相对应,将其分配到合适的端口上。IO分配的正确性和合理性直接影响到系统的稳定性和可靠性。本文将详细介绍基于S7-200 PLC的机械手搬运控制系统的IO分配方式,并解释每个IO口的用途和功能。
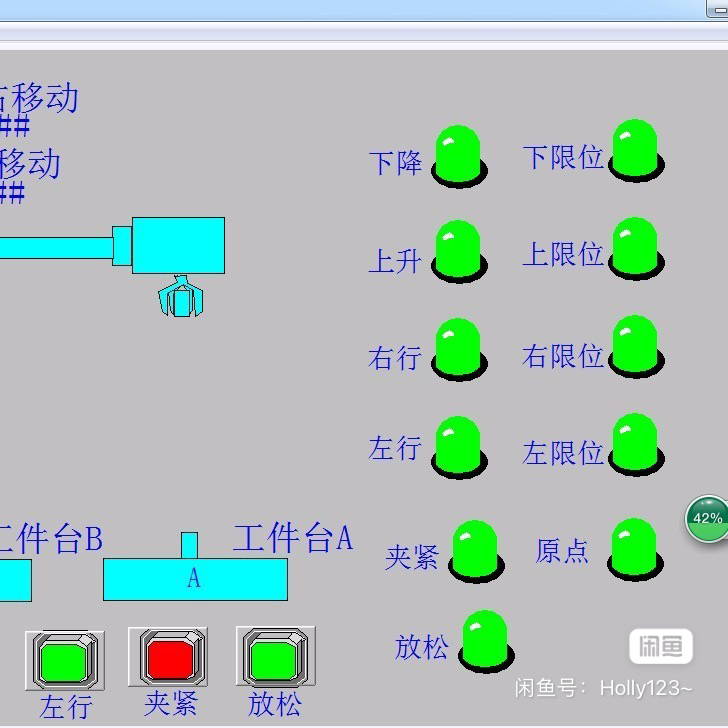
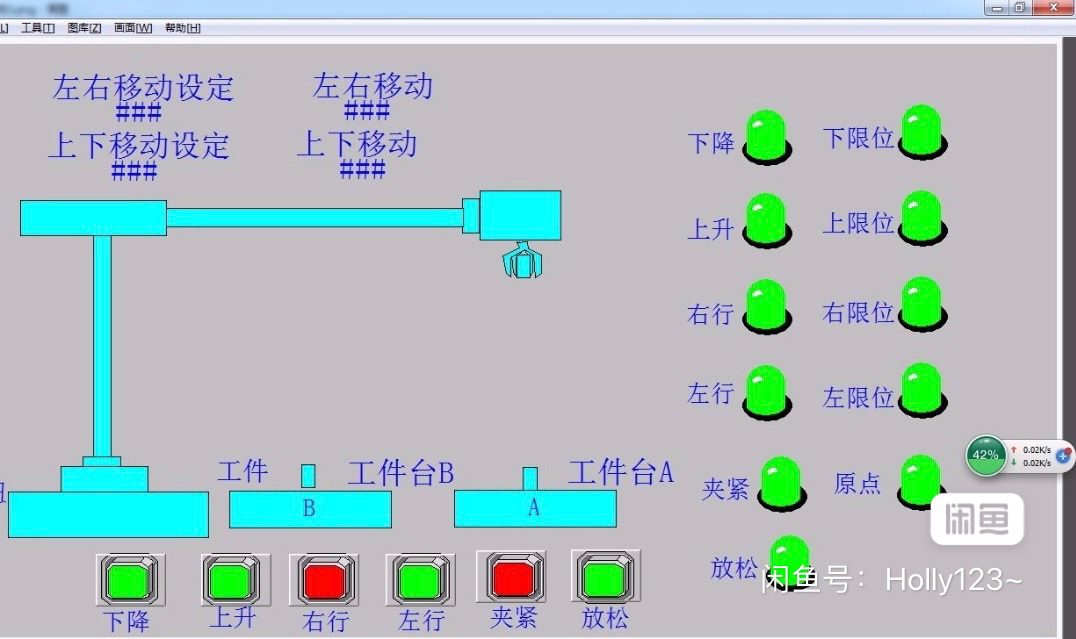
四、组态画面
组态画面是机械手搬运控制系统中用于人机交互的界面,通过其可以实时监控和操作系统。在本文中,我们将详细介绍组态画面的设计方法和实现过程,并解释每个界面元素的作用和功能。同时,还将介绍如何合理布局组态画面,使其易于操作和观察。
通过以上四个方面的阐述,读者能够全面了解基于S7-200 PLC和组态王机械手搬运控制系统的相关知识和技术细节。同时,本文还将结合实际应用场景,提供一些实用的技术分析和优化建议。总结起来,本文将为读者提供一份全面、详实的技术分析文章,使其能够深入了解该控制系统的工作原理、电气设计和人机交互等方面的内容。
总的来说,本文将以清晰的结构和流畅的语言,围绕基于S7-200 PLC和组态王机械手搬运控制系统展开,在阐述梯形图程序、接线图原理图图纸、IO分配以及组态画面等关键内容的基础上,提供实用的技术分析和优化建议,让读者能够全面了解该系统,并能够应用于实际工程中。
相关的代码,程序地址如下:http://wekup.cn/673867113925.html



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









