



以下以两相步进电机为例:
步距角:
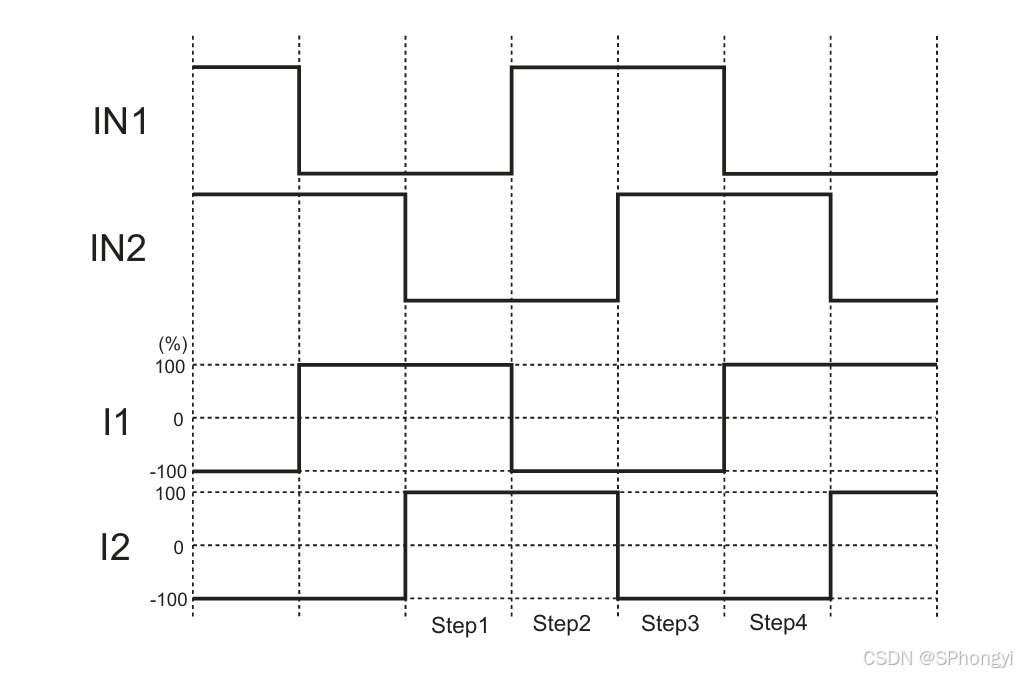
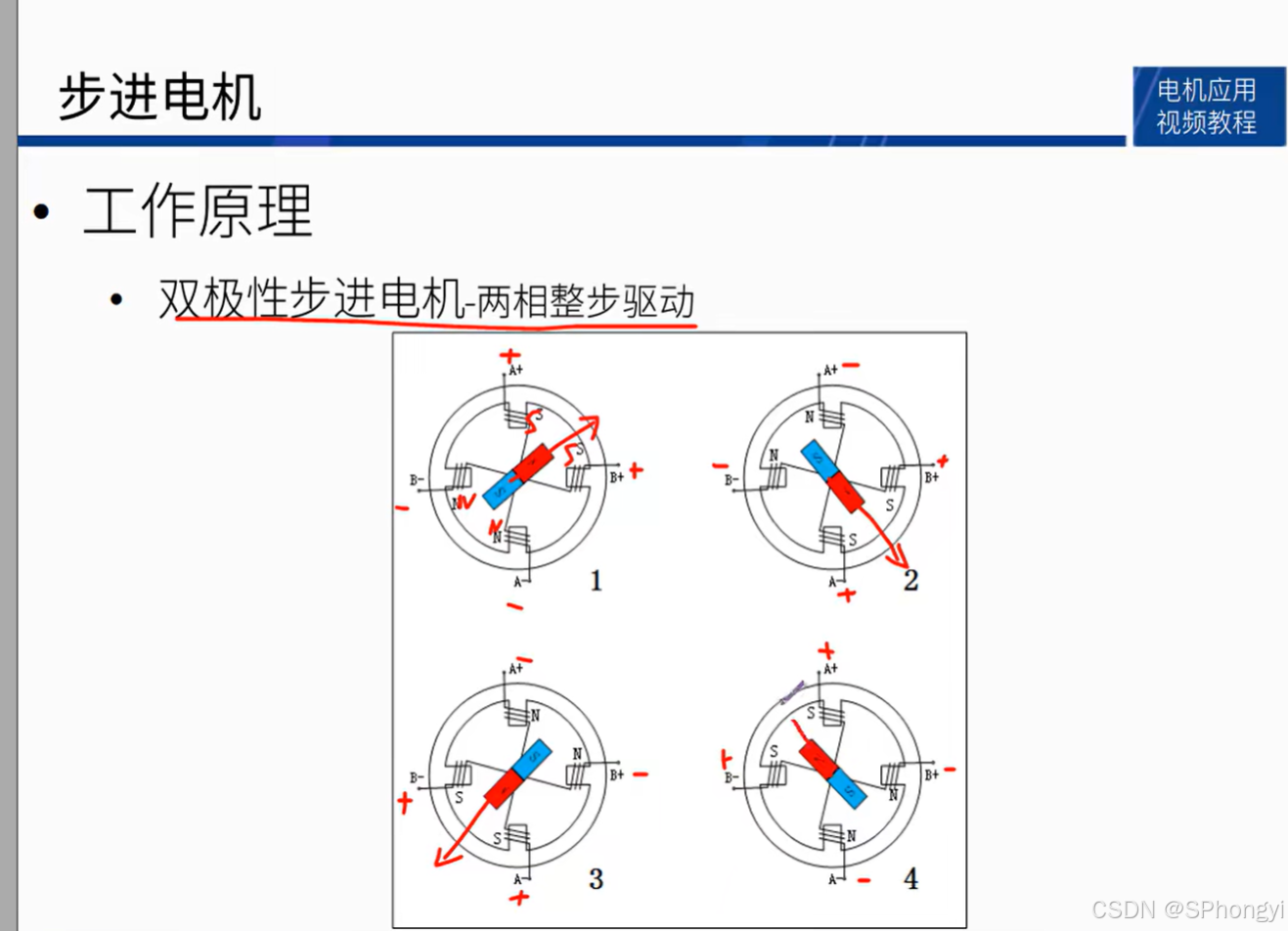
1.8度或0.9度,指步进电机的最小转动角,使用步进电机驱动器时(1细分时),输入驱动器一个脉冲转过的角度;或者两相四线走完一个步进周期时转动的角度。
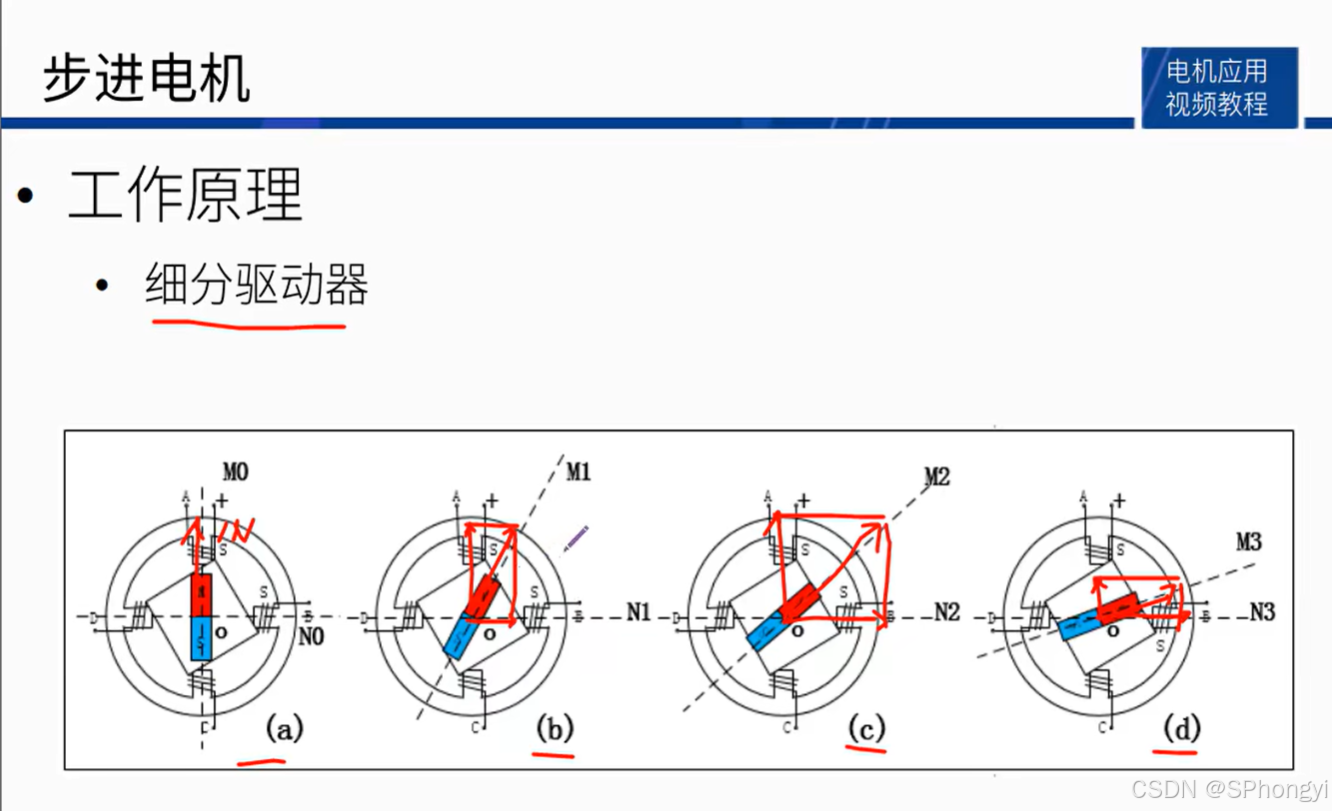
细分控制,通过在原有的两相基础上增加对两个绕组电流大小的控制,来改变组合磁场,从而减少一步的角度。(但细分似乎不能增加电机的控制精度,只能在控制脉冲信号端起到滤波的作用)
精度:
转动一个步距角的误差角度,比1.8度步距角的5%的就是0.09度。
保持转矩:
也就是扭矩,一般指电机驱动负载的能力,过低则无法驱动;
相电流(额定电流):
指步进电机驱动所需要的电流,不能选择过大或者过小,过大可能会使电机发热过量导致烧坏,而过小的话会导致扭矩不足而无法驱动负载;
相电阻、相电感(暂时不明确)
转子惯量
电机本身的“体重”,需要和负载的惯量做好匹配,否则出现小马拉大车的现象。
引线数
两相电机一般为四线制,两个绕组,各自两根线。
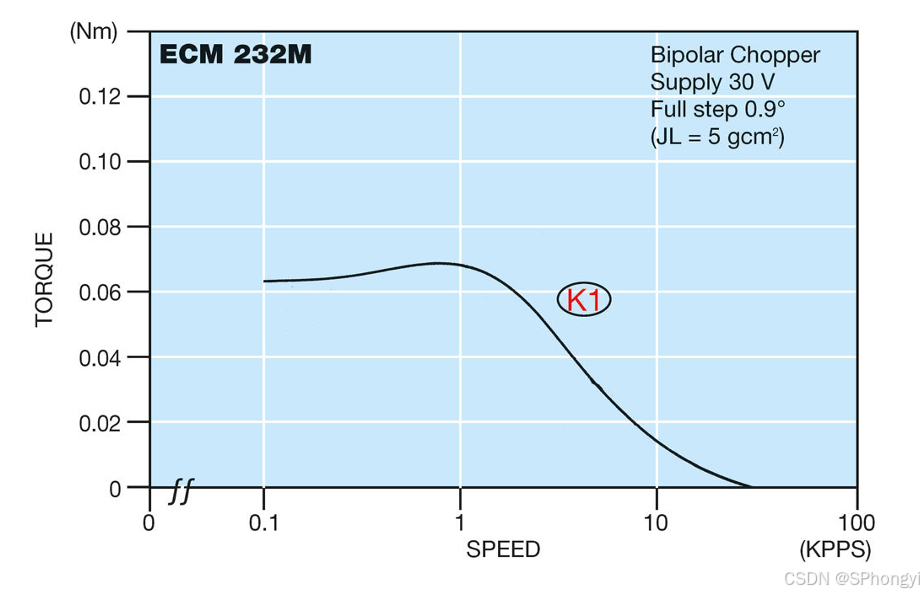
频率扭矩曲线
脉冲数与电机扭矩的曲线关系,一般步进电机的合适脉冲数在0-1k之间,否则会降低扭矩。

















 2938
2938

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









