









Robust Steerable Differential Beamformer for Concentric Circular Array With Directional Microphones--Weilong Huang∗and Jinwei Feng(基于同心圆定向麦克风阵列的鲁棒可操纵性差分波束形成器)
(1)麦克风阵列模型
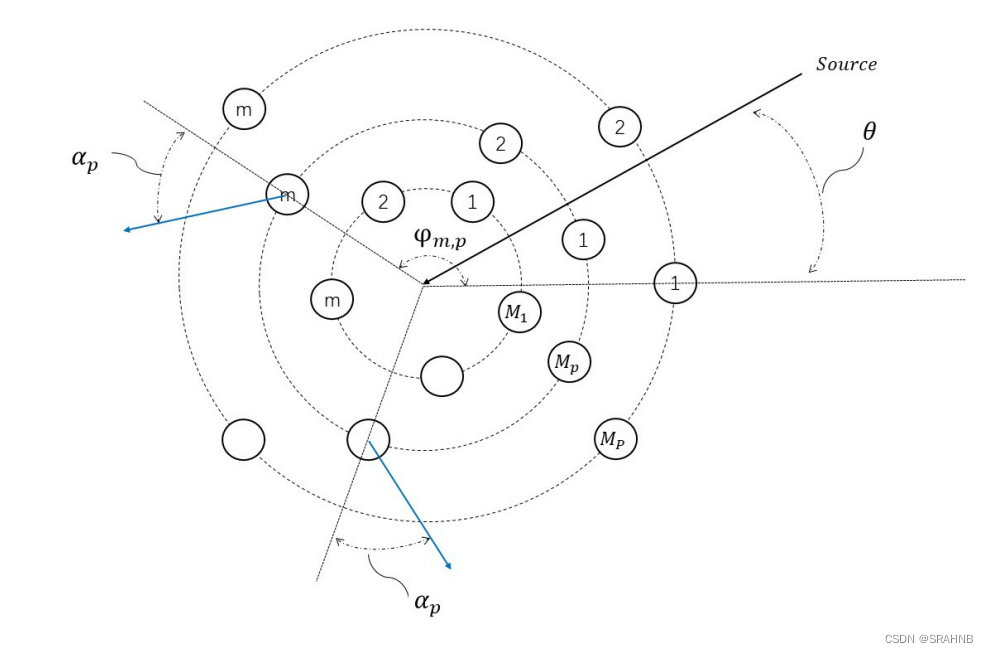
其中:
:麦克风指向性与环半径偏角;
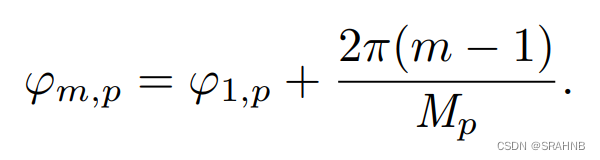
表示第几个环,m表示该环第几个麦克风,环半径为
:表示第p环第m个麦克风所在的位置;
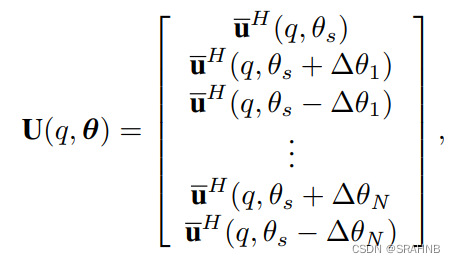
(2)导向矢量矩阵:

![]()

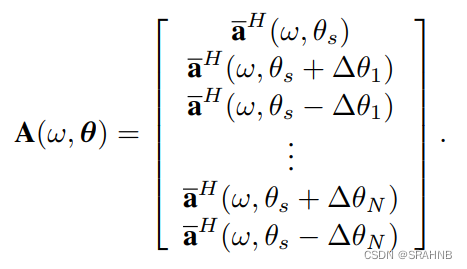
文章提出根据哈达玛积可将导向矢量矩阵分解为:
![]()
是相位响应矢量;
为幅度响应矢量。
![]()
![]()
是麦克风类型参数 ,例如心形指向性麦克风为0.5
同样地
![]()

(3)推导
![]()
基于零点约束的方法,可将微分波束形成器的约束表示成:
![]()
是维度为2N+1的第一行为1,其余全为0的列向量;N是差分阶数。


为实现更高的鲁棒性,将差分波束形成器做以下优化:
![]()
因此concentric circular differential directional microphone array (CCDDMA)
有
![]()
根据上述哈达玛积分解可以得到
![]()
故h可为

当q = 1时,定向麦克风被简化为全向麦克风,U变成全1的矩阵,前面提出的波束形成器将变成传统的差分麦克风阵列。

这样我们可以看到,常规方法hccdma(ω)是作者文中提出的方案的一种特殊情况,当传声器响应矩阵U (q, θ)被简化为all (one)矩阵(当全向元素q = 1时)。换句话说,所提出的CCDDMA可以作为一个更通用的框架来设计CCA的鲁棒差分波束形成器。此外,每个环上的每个麦克风都可以单独控制q,这可能会在具有定向麦克风的CCA设计中引入更多自由度。
(四) 性能指标
1、波束图描述了波束形成器对从入射角θ撞击到阵列上的平面波的方向灵敏度
![]()
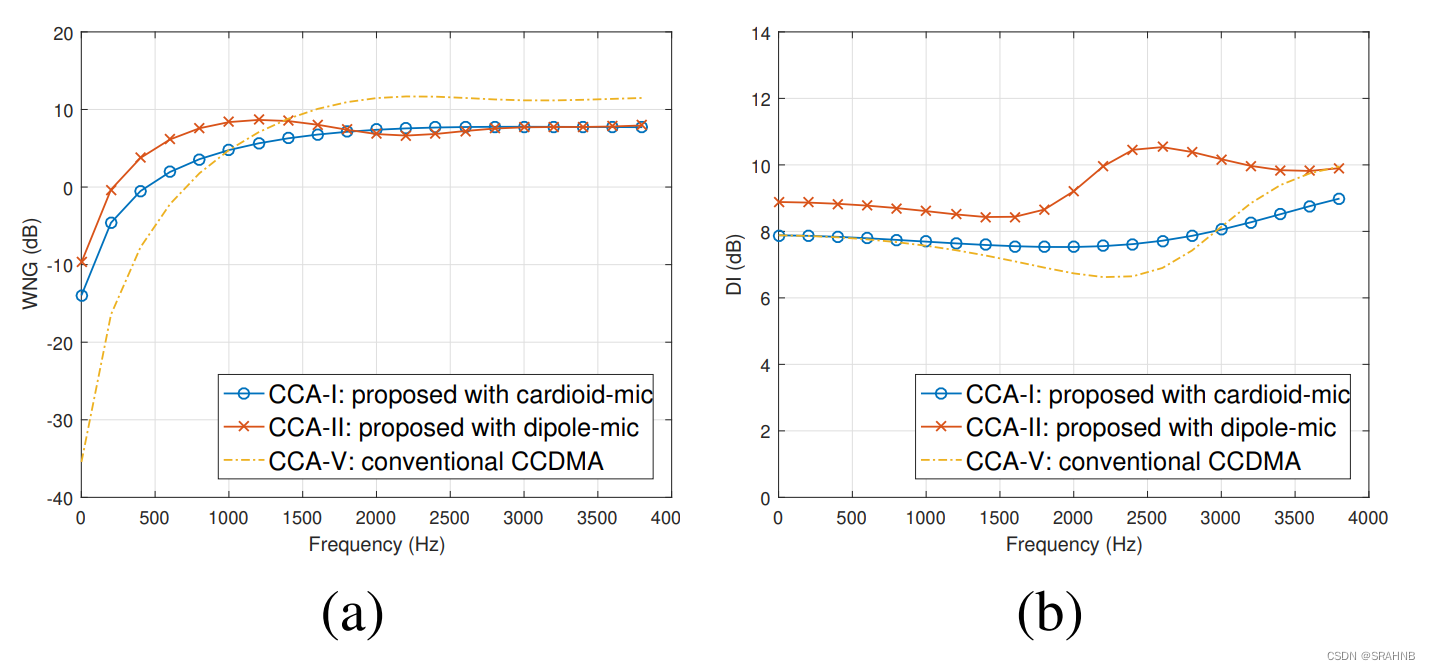
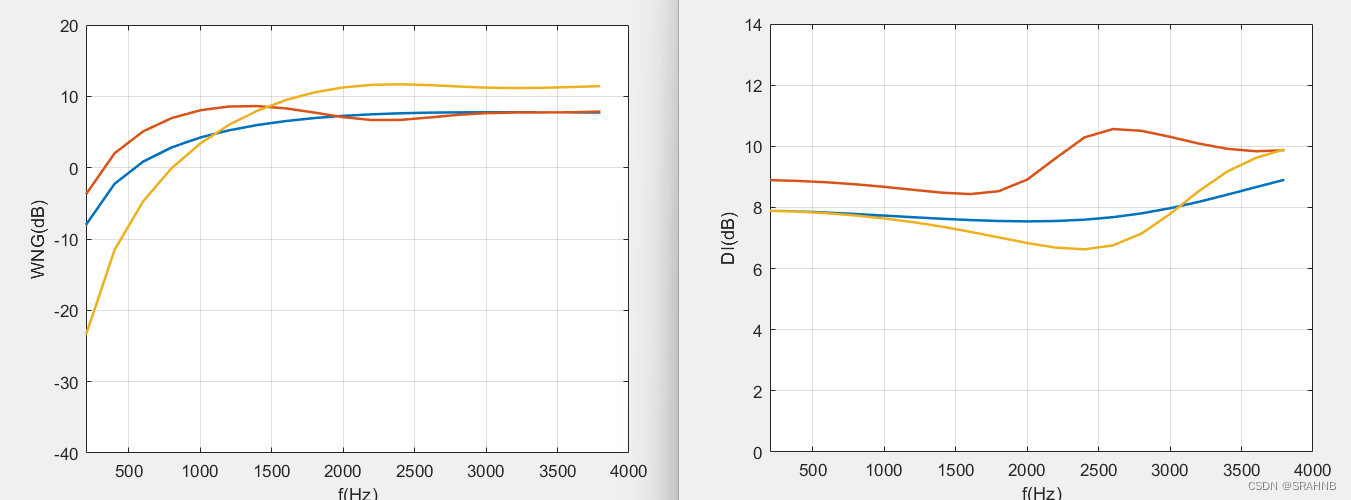
2、WNG测量抑制空间不相关噪声]的能力。这也是评估波束形成器对某些缺陷(如传感器噪声、位置误差)最方便的方式。

3、DF量化麦克风阵列在混响存在时的表现。在期望方向的无失真响应下,可表示为
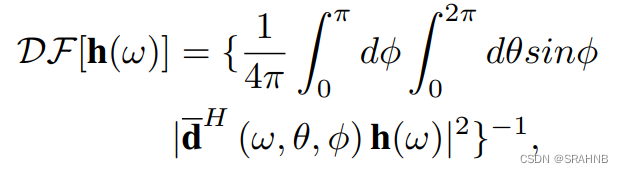
是方位角,
为俯仰角
![]()

写成指向性因子为
![]()
(五) 设计示例:心型(q = 0.5)和偶极子(q = 0)两种定向麦克风阵列
期望信号方向,
,
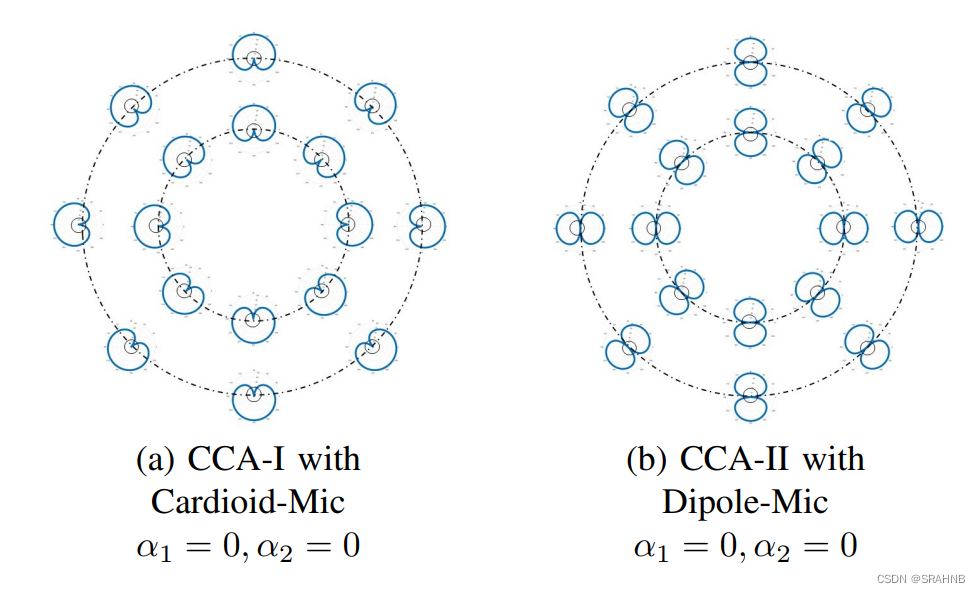
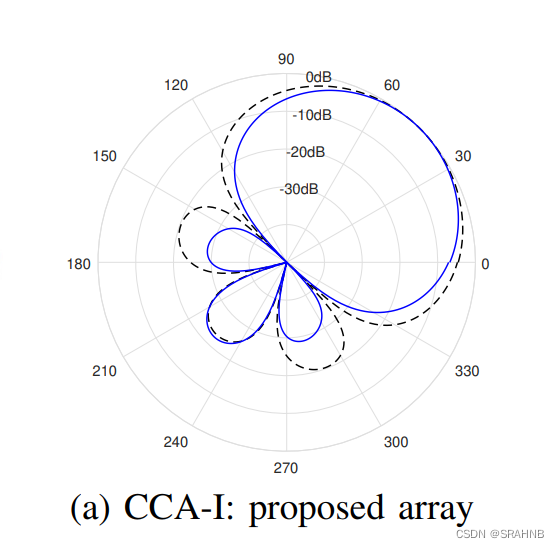
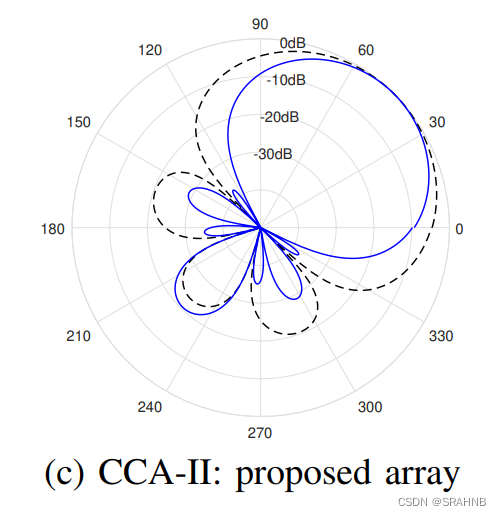
(实线3Hz,虚线1Khz)
关于公式DF中的积分,实际上积分离散化就是累加求和,简单来说就是
部分代码展示:
for t=1:length(theta)
for t1=1:length(Fai)
d1=exp(1j*k*r1*cosd(theta(t)-fai)*sind(Fai(t1))).*(q1+(1-q1)*cosd(theta(t)-fai-alfa1)*sind(Fai(t1)));
d2=exp(1j*k*r2*cosd(theta(t)-fai)*sind(Fai(t1))).*(q2+(1-q2)*cosd(theta(t)-fai-alfa2)*sind(Fai(t1)));
temp=[d1.';d2.'];
p1(t1)=abs(h'*temp)^2*sind(Fai(t1));
end
p2(t)=sum(p1);
end
sum_value=pi*sum(p2)/length(theta)/length(Fai)/2;
DI(i,j)=10*log10(abs(d_thetas'*h)^2/sum_value);部分仿真结果如下:















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









