







在测量电梯轨距的项目用到了这个模组,我这个是量程8m的,客服只给了两个文档,没有代码,这里分享最简单的三种使用方法,分别是使用官方上位机,串口通信,IIC通信
简单介绍一下模块,更多细看请查看官方文档
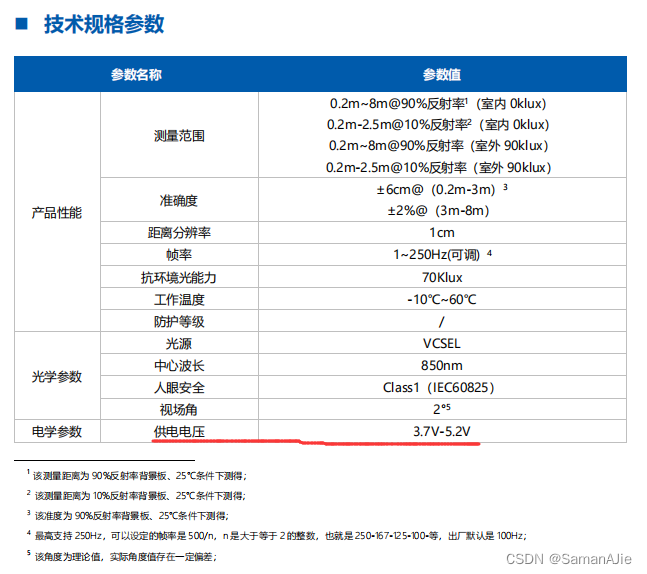
这里需要注意供电电压为3.7V-5.2V,有很可能没注意到而直接使用3.3V供电,我是使用5V供电


模块的通信方式有两种,UART和IIC。串口的波特率默认为115200,可发送指令更改,IIC通信速率400k以内,默认从机地址为0x10。

他的接口间距是1.25mm,发货时带了一根双头mx1.25 6p的线,如果想在单片机上调试,需要买一根mx1.25转杜邦线

如果你跟我一样比较急,就直接暴力拆解,焊杜邦线上去,然后打胶
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









