










PWM有非常广泛的应用,比如直流电机的无极调速,开关电源、逆变器等等。个人认为,要充分理解或掌握模拟电路、且有所突破,很有必要吃透这三个知识点:
-
PWM
-
电感
-
纹波
PWM是一种技术手段,PWM波是在这种技术手段控制下的脉冲波。
如图1所示,这种比喻很形象也很恰当,希望对学习的朋友有所帮助与启发。
图1:形象的比喻
PWM全称Pulse Width Modulation:脉冲宽度调制(简称脉宽调制,通俗的讲就是调节脉冲的宽度),是电子电力应用中非常重要的一种控制技术,在理解TA之前我们先来了解几个概念 。
脉冲波的基本信息如图2所示:
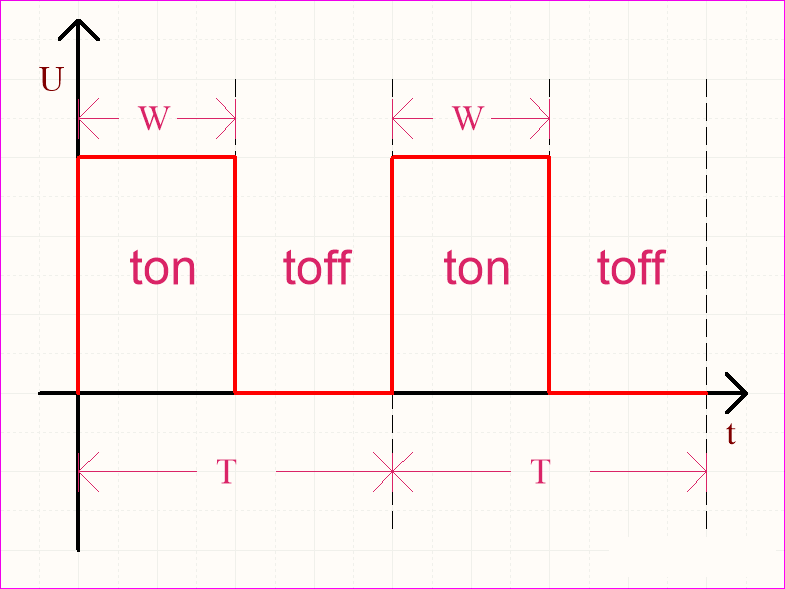
图2:脉冲波的基本信息
-
脉冲周期(T),单位是时间,比如纳秒(ns)、微妙(μs)、毫秒(ms)等;
-
脉冲频率(f),单位是赫兹(Hz)、千赫兹(kHz)等,与脉冲周期成倒数关系,f=1/T;
-
脉冲宽度(W),简称“脉宽”,是脉冲高电平持续的时间。单位是时间,比如纳秒(ns)、微妙(μs)、毫秒(ms)等;
-
占空比(D),脉宽除以脉冲周期的值,百分数表示,比如50%。也常有小数或分数表示的,比如0.5或1/2。
以上之间的关系如图3所列的公式:
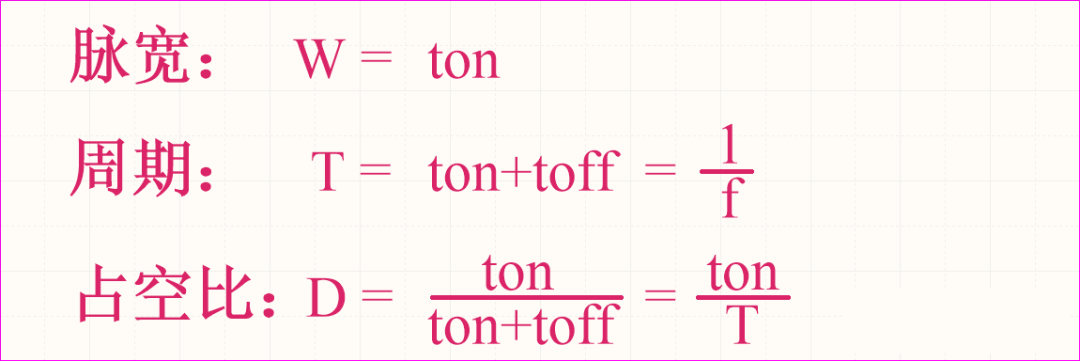
图3:公式
工程应用中的PWM波是幅值、周期(或频率)不变,脉宽(或占空比)可调的脉冲波。接下来我们来认清该PWM波到底是什么,TA隐藏着什么思想?
如果我们想要控制一个直流电机的转速,我们可以通过改变其两端电压即可;但是该种方法有很大的局限性,可调直流电源构造复杂、成本高昂,应用起来很不现实。
所以我们采用另外的控制方式:电压源→驱动器→直流电机,电压源提供直流电压,不同的驱动器控制不同的直流电机,应用非常灵活。其中驱动器对电机的调速控制就是利用PWM。
可调直流电源控制与PWM控制都能调速,那么它们有什么相同之处呢?
如图4~图7,电机为某相同转速时,红色代表驱动器输出幅值不变的PWM波,蓝色代表可调直流电源输出的电压。两者都是直接作用到负载。
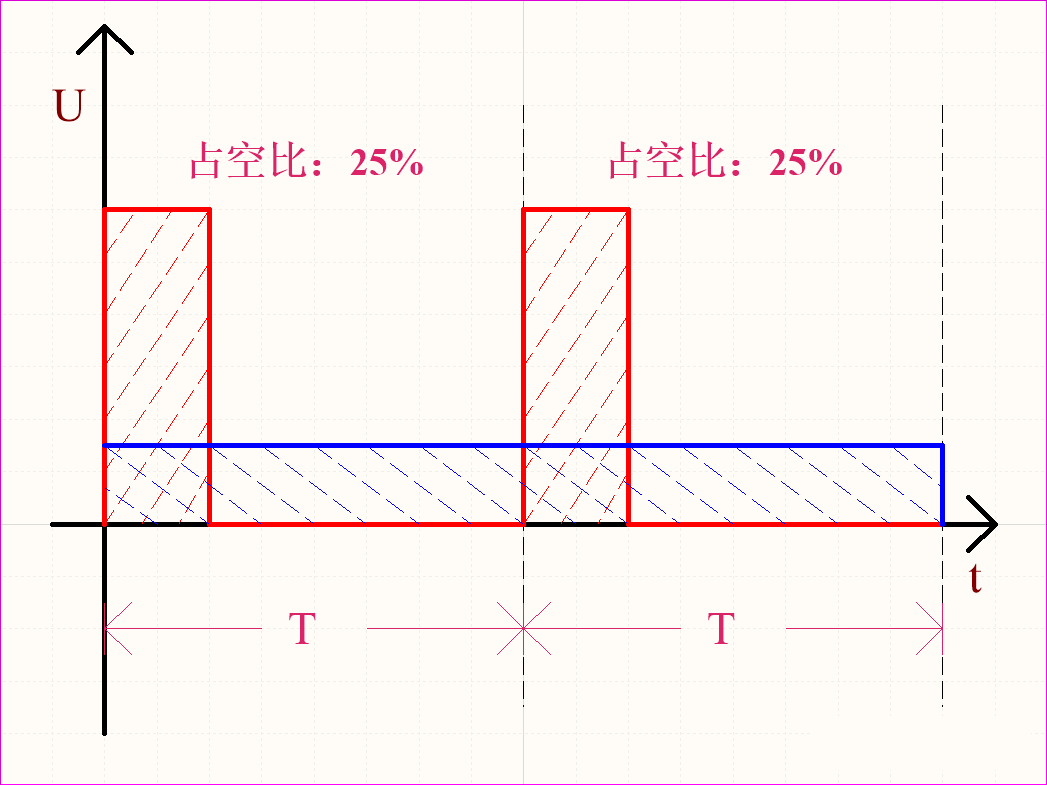
图4
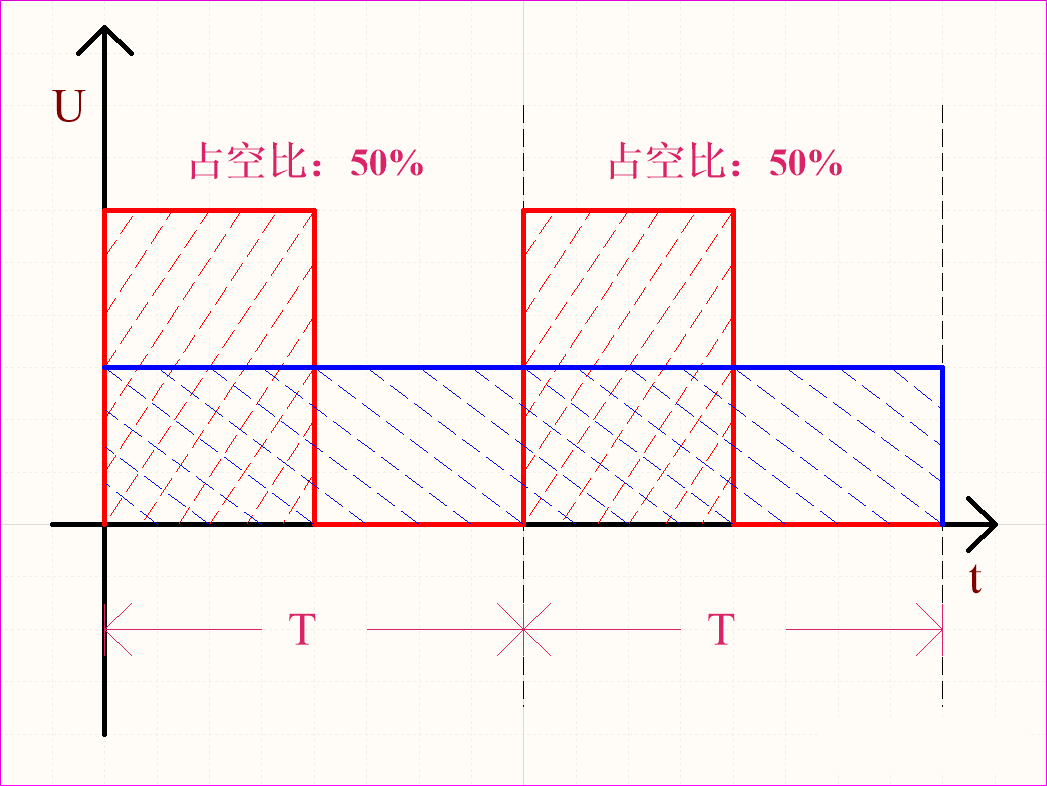
图5
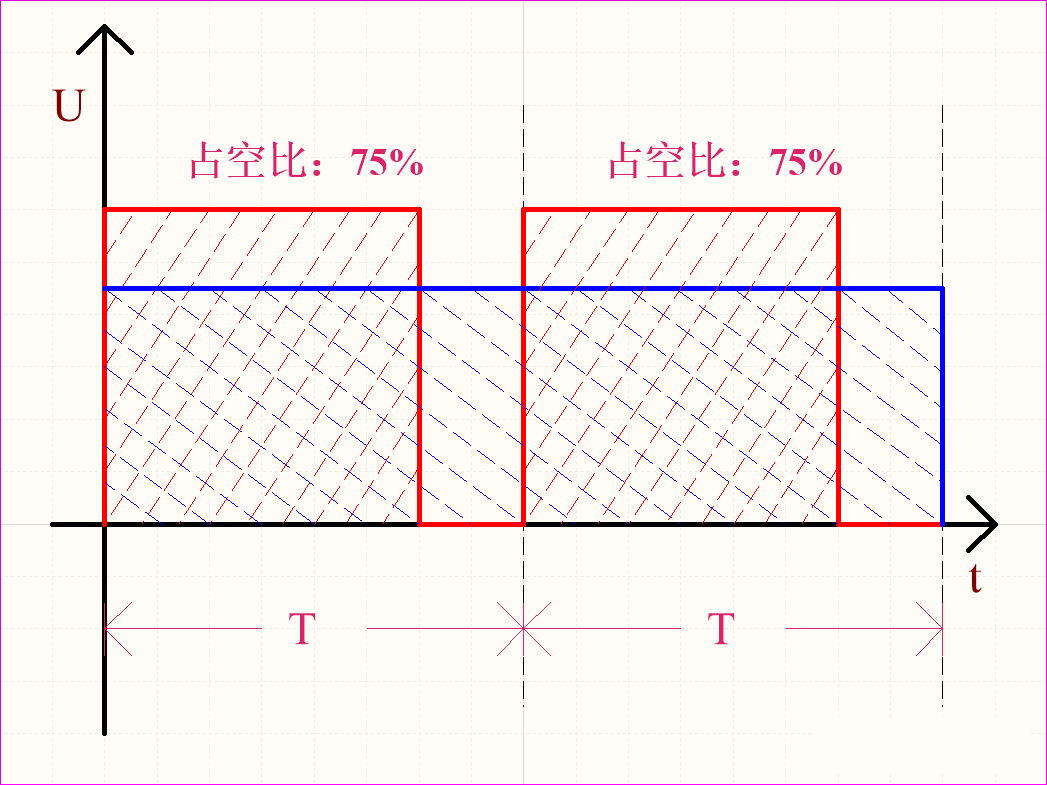
图6
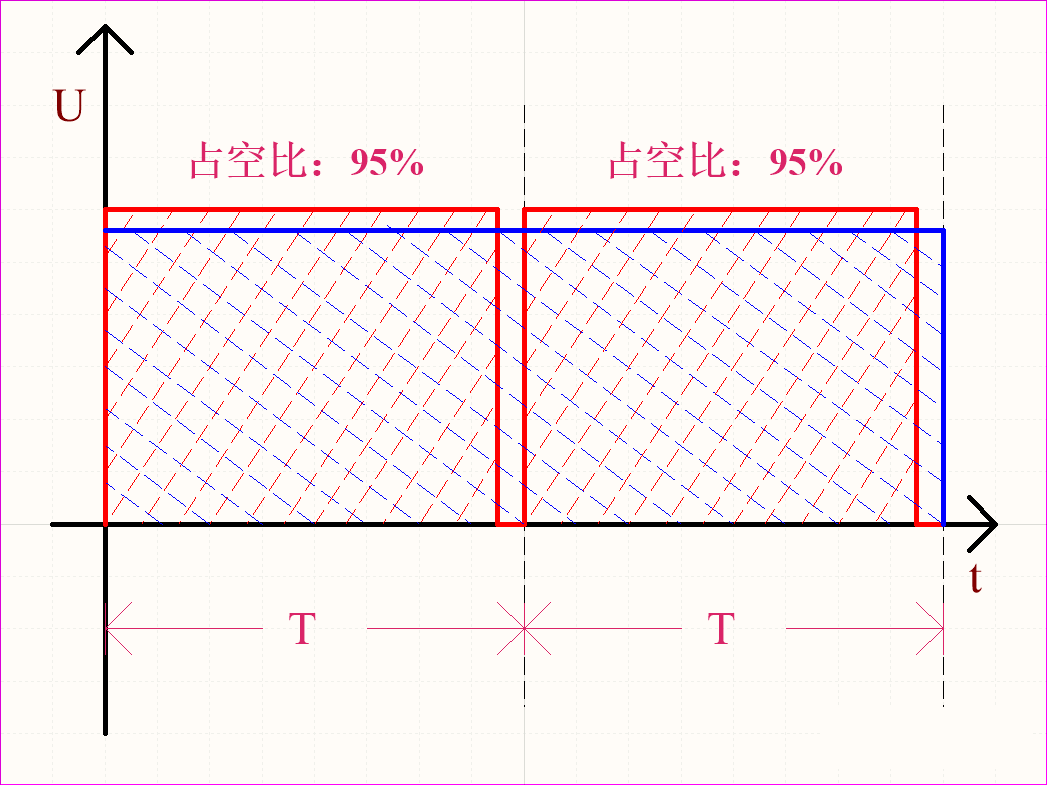
图7
由以上得知:
-
当PWM波的占空比越大时,所对应的直流电压与PWM波的幅值越接近;反之与0V越接近;
-
周期的红色PWM波脉宽下的矩形面积之和与蓝色直流电压的面积相等,即伏秒积相等:
两端同时除以T,得到如下关系式:
例如当PWM波的幅值为24V,占空比为50%时,与直流电压12V作用到电机上所产生的效果是一模一样的,即速度相同;即24V×50%=12V。
另外,既然满足这个关系,那PWM波的频率是不是可以随意了,答案当然不是,频率太低会导致电机运转不畅,振动大,噪音大;频率太高会导致驱动器开关损耗较大,甚至有电机会啸叫而不转的情况。一般1k~30k的PWM频率较为普遍,几百Hz的也有,实际上还是根据电机功率在测试时确定合适的PWM频率范围为宜。
如图8为实物测试,脉宽在变化,周期不变的PWM波,所加负载如图9所示。
图8:扭动旋钮控制脉宽变化
如图9为实物测试,有刷直流电机的PWM无极调速,其中LED是并联在电机输入端的,其亮弱反映电机速度的变化。
图9:PWM控制电机调速
要点:
①PWM波其实就是一种脉宽可连续调节的矩形脉冲波;
②占空比其实就是描述脉宽与脉冲周期的比值,是量化值,便于分析研究,当我们用占空比来表达时,对脉宽就不那么关心了;
③占空比调节就是脉宽调节,表达不一样,但本质是一样的;
④PWM波满足伏秒积计算:U红(幅值) × 占空比 = U蓝,作用效果与直流电压一样。

















 7027
7027

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









