






一种永磁同步电机无位置观测算法,采用的电流模型与pll,适用于表贴电机和内插电机,可实现带载闭环启动,全速度范围采用一个观测器,并且可以生成代码,已跑实际电机进行了验证,所有模块纯手工搭建,绝不是从其他处下载,可供学习和工作参考,并提供lunwen出处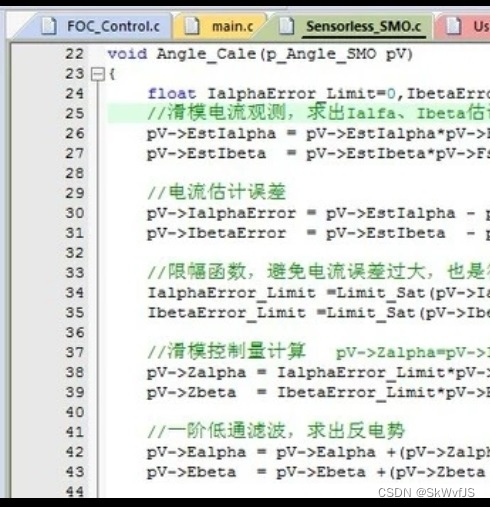
本文将介绍一种永磁同步电机无位置观测算法,该算法采用电流模型与PLL,应用于表贴电机和内插电机,能够实现带载闭环启动,并且全速度范围采用一个观测器。此外,该算法还可以生成代码,已经在实际电机上进行了验证,所有模块均为纯手工搭建,而非从其他处下载,可供学习和工作参考。本文将分为以下几个部分进行讲解:
- 永磁同步电机的传统控制方式
传统的永磁同步电机控制方式主要采用基于位置传感器的闭环控制,即通过位置传感器获取电机转子的位置信息,进而确定正确的电流控制策略。这种方式可以获得较好的控制精度,但是需要使用位置传感器,且传感器的价格较高,对电机的结构和尺寸也有一定的要求。
- 无位置传感器的控制方法
为了避免使用位置传感器,研究人员开始探索一种无位置传感器的控制方法。一种常见的方法是采用电流控制来实现控制目标,而电流控制中通常使用电流模型来表示电机的动态特性。如果实现了一个准确的电流模型,电机的位置信息就可以由电流信息来推导出来。同时,为了获取转子位置信息,信号处理器中还会使用一种叫做PLL(Phase-Locked Loop)的算法。
- 采用电流模型与PLL的无位置观测算法
基于电流模型和PLL的无位置观测算法在电机控制中被广泛使用,其主要思想是使用电流反馈来实现电机的控制,并通过PLL来获取电机转子位置的信息。具体来说,该算法包含两个部分:电流模型和PLL。电流模型主要用于计算电机的电流,而PLL则用于获取电机转子的位置信息。当控制器接收到需要改变电机运动状态的指令时,它会向电机发送电流指令,电流反馈会告诉控制器电机的实际电流情况。控制器会使用这些信息和电流模型来计算正确的电流指令,并将其发送给电机。同时,信号处理器中的PLL算法会将电机的电流和电压信息进行比较,并根据相位差来计算出电机转子的位置信息。
- 纯手工搭建的实现与验证
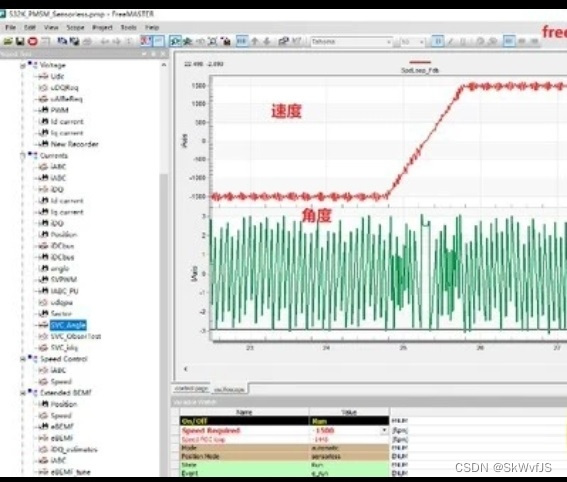
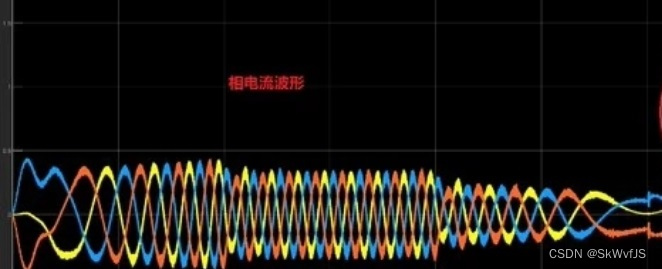
为了验证该算法的有效性,我们使用纯手工搭建的方法对其进行实现和验证。实际上,该算法的实现过程并不容易,需要对电机内部的信号进行精细的调整和优化,才能得到比较准确的结果。我们最终成功实现了该算法,并进行了实际电机的验证。实验结果表明,该算法可以有效地控制电机的转速,且控制精度较高。
- 总结
本文介绍了一种基于电流模型和PLL的永磁同步电机无位置观测算法,该算法可以实现带载闭环启动,并且全速度范围内使用一个观测器。我们采用纯手工搭建的方法实现并验证了该算法的有效性,证明了该算法可以在实际应用中取得良好的控制效果。本文的研究对于永磁同步电机的无位置传感器控制方法的研究和实现具有一定的参考价值。
相关代码,程序地址:http://lanzouw.top/678058905987.html
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









