






你的赛车可以从位置 0 开始,并且速度为 +1 ,在一条无限长的数轴上行驶。赛车也可以向负方向行驶。赛车可以按照由加速指令 'A' 和倒车指令 'R' 组成的指令序列自动行驶。
当收到指令 'A' 时,赛车这样行驶:
position += speed
speed *= 2
当收到指令 'R' 时,赛车这样行驶:
如果速度为正数,那么speed = -1
否则 speed = 1
当前所处位置不变。
例如,在执行指令 "AAR" 后,赛车位置变化为 0 --> 1 --> 3 --> 3 ,速度变化为 1 --> 2 --> 4 --> -1
给你一个目标位置 target ,返回能到达目标位置的最短指令序列的长度。
# 解题思路 - BFS(Bellman Ford):
Bellman-Ford 算法是一种用于计算带权有向图中单源最短路径(SSSP:Single-Source Shortest Path)的算法。
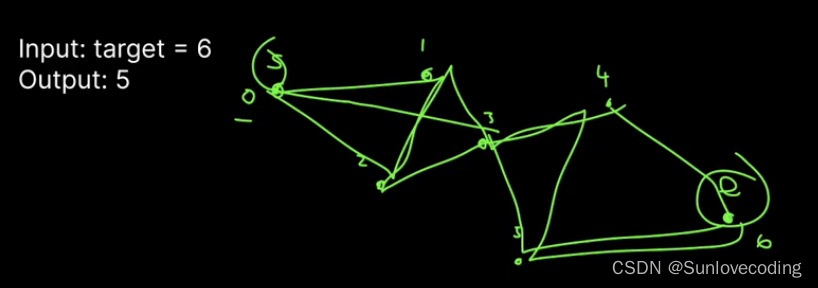
这个题本质上是以position作为Vertex,即每个位置都可以看作是一个点,1-2-3-4-5-6 --> target每个点之间又可以相互连接,即从1->3,然后3->7,7->13,因为速度可以变成负数,所以位置还可以从13连到12,然后12连到11...依此类推,我们可以发现这个题目的本质就是以 pos 为 vertex,寻找从pos 0出发到 vertex的最短距离。最短距离有两种算法:bellmanford 和 dijikstra,先讲最好懂的 bellmanford。
什么时候需要改变speed?
1. 如果当前位置 + 当前速度 > target,并且当前速度 > 0 ,说明我们需要后退(speed变为-1)
2. 如果当前位置 + 当前速度 < target, 并且当前速度 < 0, 说明我们需要重新前进(speed变为1)
# BFS代码
def racecar(self, target: int) -> int:
q = collections.deque() # move, pos, speed
q.append((0,0,1))
visited = set()
while q:
move, pos, speed = q.popleft()
if pos == target:
return move
if (pos,speed,move) in visited:
continue
else:
visited.add((pos,speed,move)) # 一定是先把之前的点放进visited数组
q.append((move+1, pos + speed, speed * 2)) # 然后再对这个点进行操作,放进queue里面
if (pos + speed > target and speed > 0) or (pos + speed < target and speed < 0):
speed = -1 if speed > 0 else 1
q.append((move+1,pos,speed)) # pos doesn't change here
# 这道题破题的关键思路是:每个 pos 都是图中的一个点,1 2 3 4 5 ,每个点之间都可能是相连的,求点0到点target的最短路径# 易错点分析:
1.为什么终止条件不是 if pos + speed == target: return move?
如果要写成这样的话,应该返回 move + 1,因为要把最后一次的操作给加上去
2.为什么一开始不把点放在visited,再进入while q这个循环?
其实是可以的,可以先把点放进visited set里面,反正会通过这句:if (move, pos, speed) in visited: continue 对这个点进行跳过。
3.函数什么情况下会陷入死循环?
如果不加上visited set,函数就会进入死循环出不来。
4.为什么第三个if的判断条件不是和前面两个if持平?
因为第三个if是在无脑加速前进的前提下,我们再去看,有没有用力过猛超速的情况。所以改变speed的判断是在加速的前提下进行判断的。
5. 为什么改变速度之后,新的坐标不需要放进set?
因为这个行为会在下一次执行 while q 的时候自动加进去,试过如果最后一行加上这句话也是可以通过的。
# 时空复杂度:
Bellman-Ford 算法采用动态规划(Dynamic Programming)进行设计,实现的时间复杂度为 O(V*E),其中 V 为顶点数量,E 为边的数量。Dijkstra 算法采用贪心算法(Greedy Algorithm)范式进行设计,普通实现的时间复杂度为 O(V2),若基于 Fibonacci heap 的最小优先队列实现版本则时间复杂度为 O(E + VlogV)。















 893
893











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









