







 本文介绍了自主研发的激光雷达SLAM技术,结合高精度单轴云台,实现大场景下高精度点云获取,为自动化工业提供先验数据。已在矿业、冶金等多行业应用,支持灵活配置。
本文介绍了自主研发的激光雷达SLAM技术,结合高精度单轴云台,实现大场景下高精度点云获取,为自动化工业提供先验数据。已在矿业、冶金等多行业应用,支持灵活配置。
激光雷达SLAM三维建图、点云算法 点云处理
自己写的算法 没用任何现成的库文件3D云台激光扫描系统
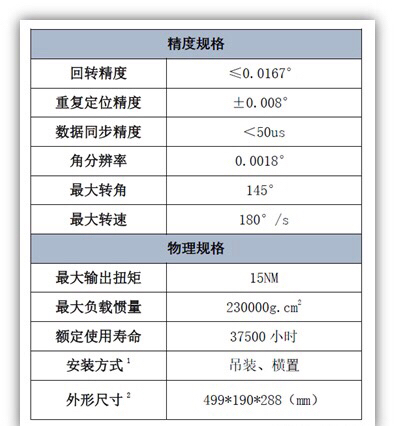
创新的结合高精度单轴云台和2维激光雷达,获取大场景下高精度点云轮廓,为自动化工业场景提供先验数据。
该方案目前已经部署多台,涉及矿业、冶金、建筑、运输等多个行业,系统支持多种雷达,可根据场景进行不同配置。
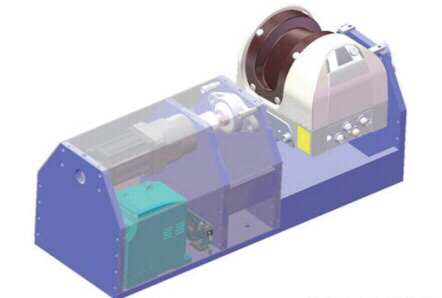
3D激光扫描平台是集成机械、电子以及软件于一体的高精密、集成化设备。
采用精密同步云台将二维激光雷达的测量数据与雷达的实时角度数据融合,利用点云处理算法还原成三维点云图像。
ID:6913000639409254347
全村最靓

激光雷达SLAM三维建图、点云算法及点云处理的研究
摘要:本文介绍了激光雷达SLAM三维建图、点云算法以及点云处理的相关技术。通过自主研发的算法,本文创新地结合了高精度单轴云台和二维激光雷达,成功获取了大场景下的高精度点云轮廓,并为自动化工业场景提供了先验数据。该方
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









