






 本文介绍了如何在QT+VTK环境中对六自由度机械臂进行3D显示,包括模型准备、关节旋转轴和DH参数应用、坐标系建立、STL导出以及坐标位置记录。SolidWorks篇详细讲解了导出步骤,后续将更新代码实现部分。
本文介绍了如何在QT+VTK环境中对六自由度机械臂进行3D显示,包括模型准备、关节旋转轴和DH参数应用、坐标系建立、STL导出以及坐标位置记录。SolidWorks篇详细讲解了导出步骤,后续将更新代码实现部分。
本文将介绍一下在QT+VTK环境下对机械臂进行显示,QT提供一个整体Widget界面,VTK提供一个显示的QVTKWidget界面,为了区分,将文章分为SolidWorks篇与代码篇两个部分。
1.模型准备,我这边已经准备好了一个六自由度机械臂模型(ABB2600模型),如果有需要可以自己在SolidWorks中建一个所需要的机械臂。
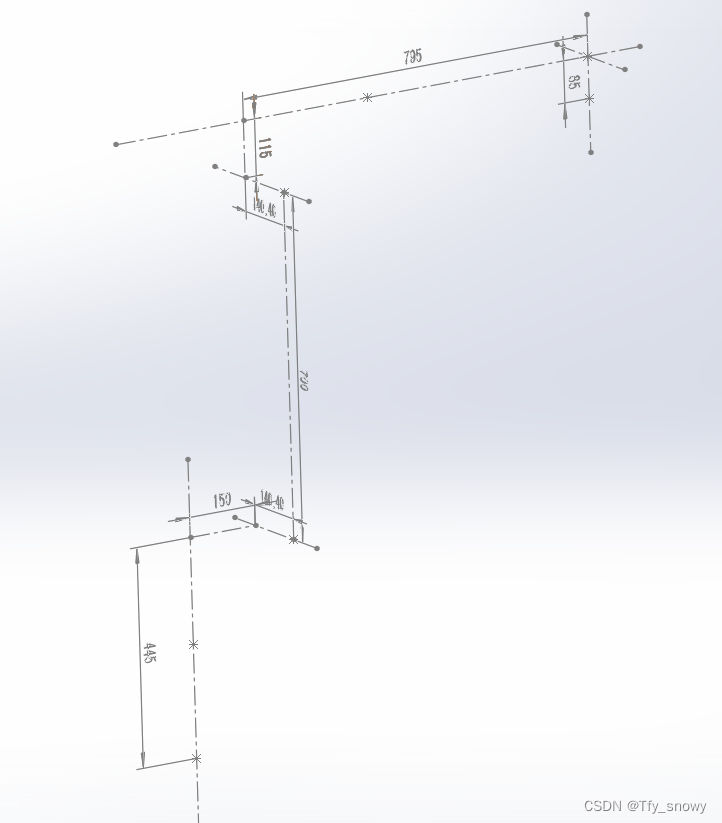
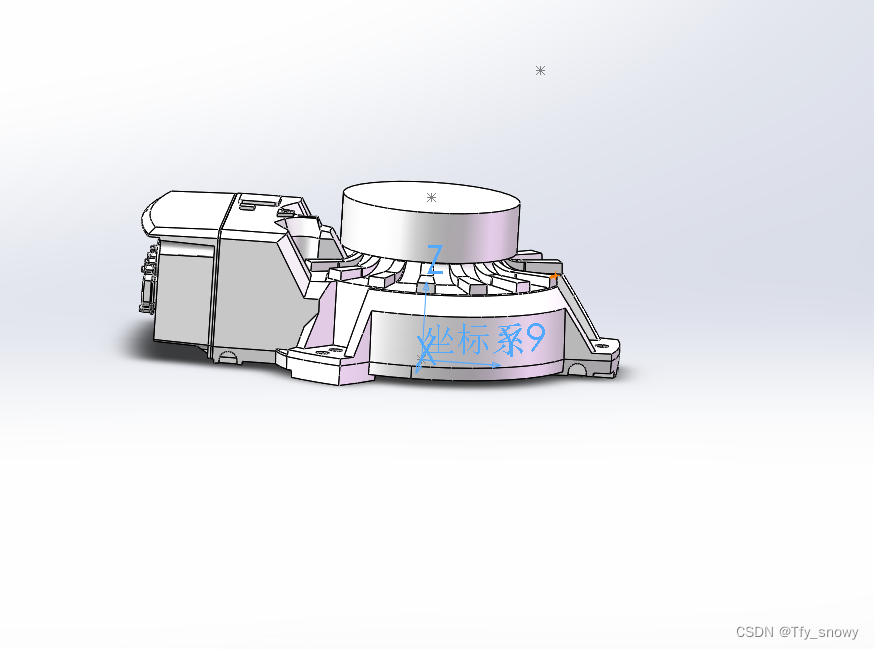
2.针对每个关节画出一条旋转轴,然后根据DH参数的要求建立相关坐标系(注:这一步如果要求严格一点就会很重要,因为模型确定了的话,坐标点是确定的,如果要求不是很严格可以不用按照DH参数来,即坐标点只需要在旋转轴上即可,如果不懂可以去看看DH参数的详细介绍)
加了坐标系的图如下(一定要有一个Base_Link基坐标系):
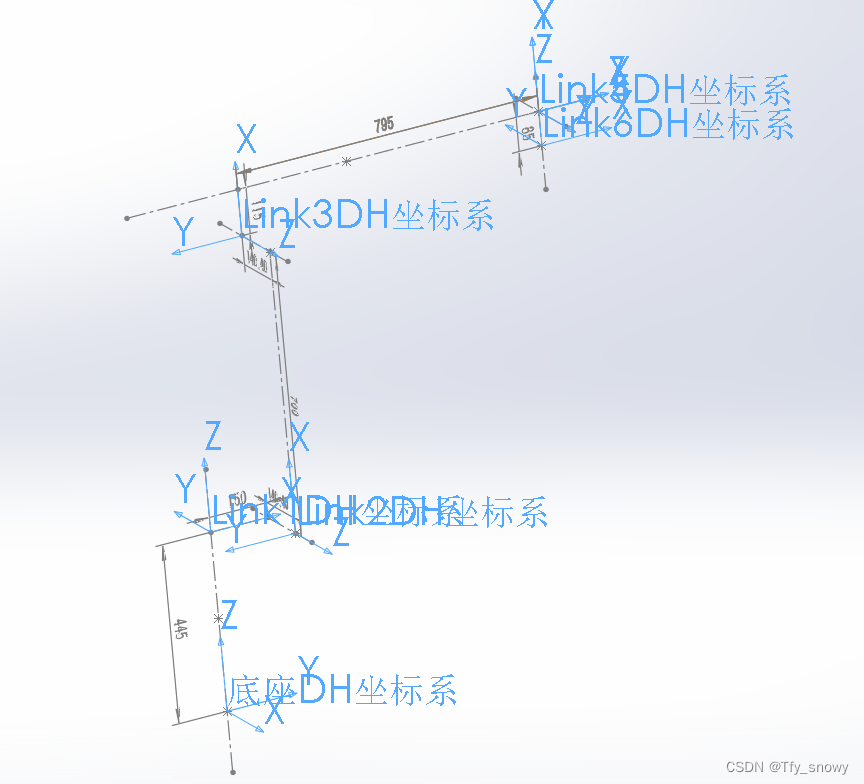
如果要求高的话坐标系不要乱建,坐标系的建立有相应的原则,DH参数遵循Rx->Dx->Rz->Dz的原则进行各个坐标系的建立,因为要根据DH参数表进行正逆运动学的计算。
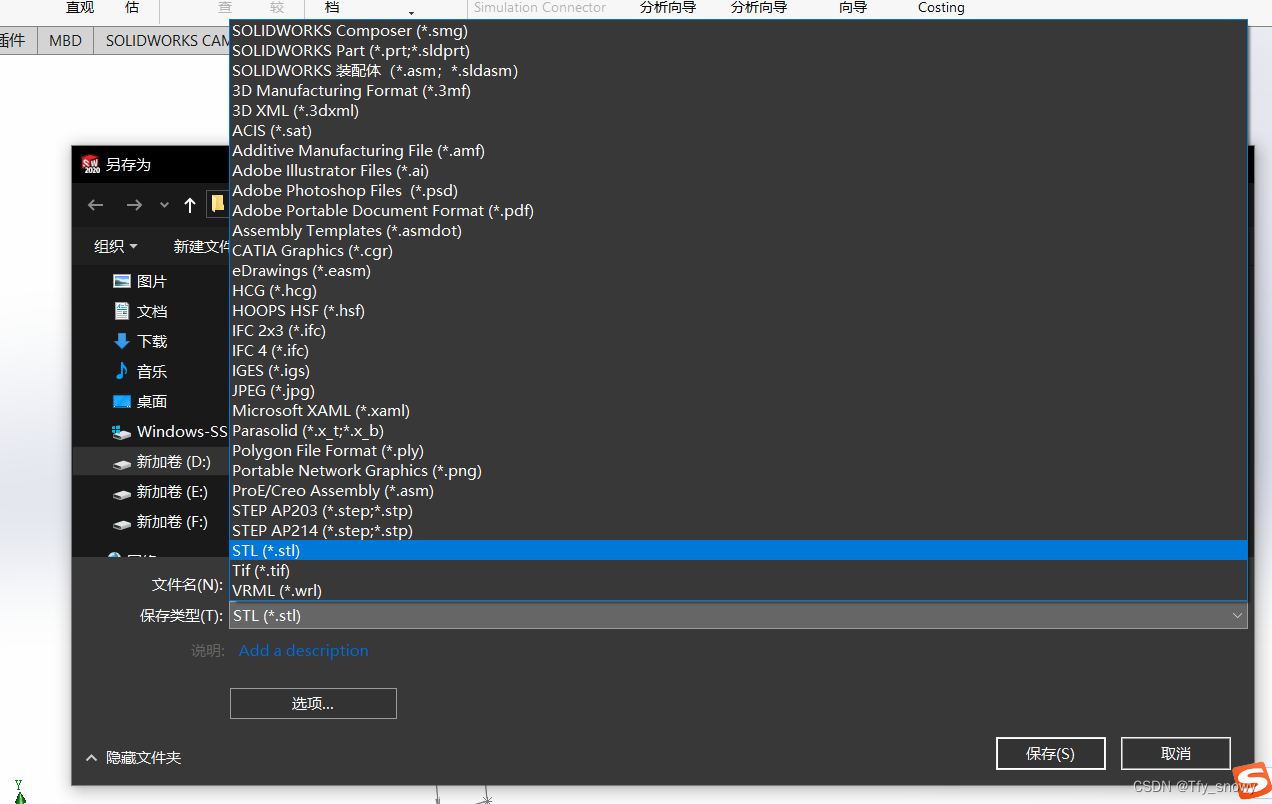
3.建立好坐标系后,就需要将各个关节和基座导出,导出的格式为STL格式,在导出之前,需要在SolidWorks中做一些前提操作
3.1 选项设置(注意,要导出哪个关节就将输出坐标系设置为哪个关节坐标系)
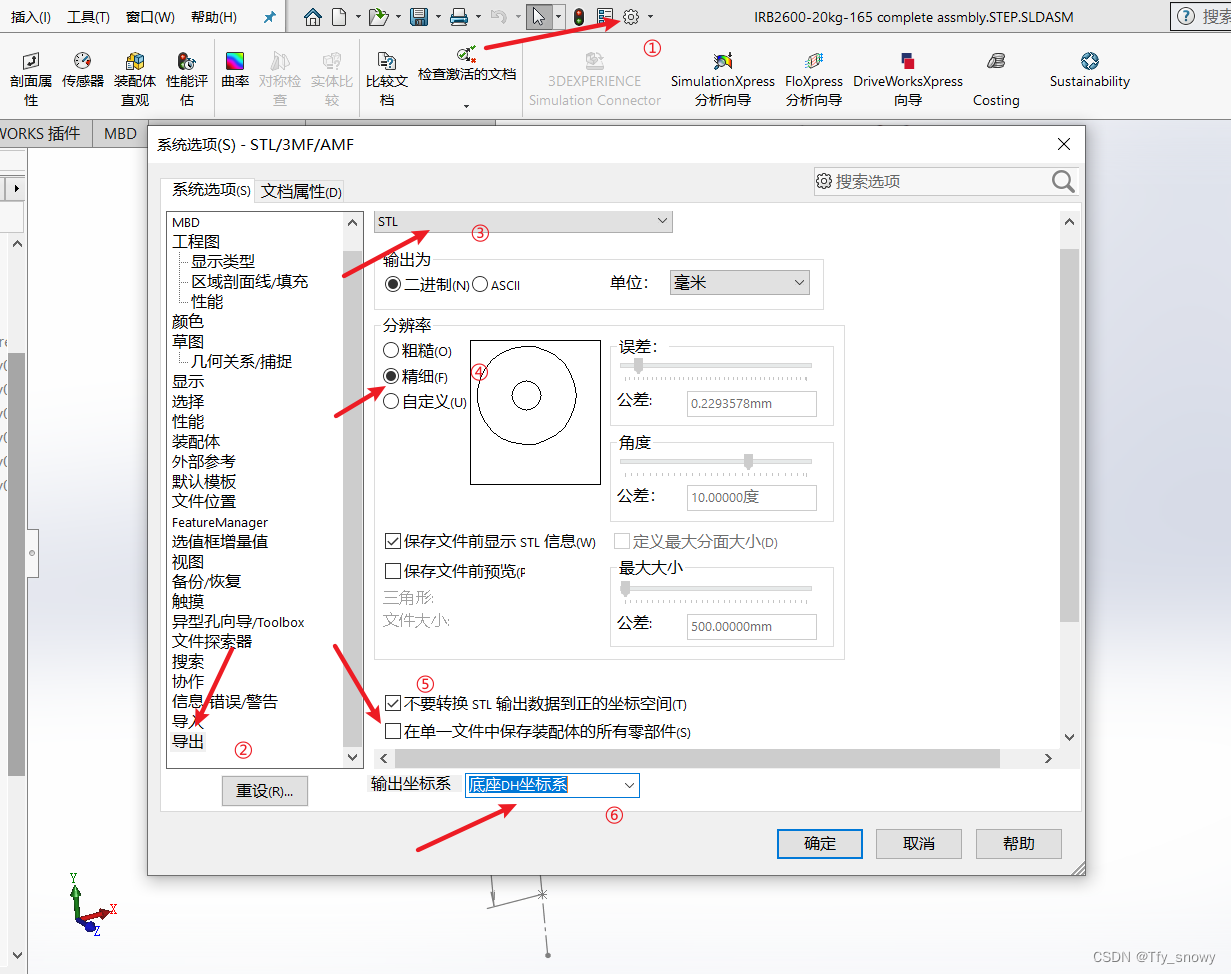
3.2 模型设置:需要导出哪个关节,就把这个关节单独显示,其他部分暂时压缩(注意该关节必须是零件,不能是装配体!!不能是装配体!!否则会导出一堆零件)
3.3 导出就不多说,就是另存为STL格式,命名自己随意,路径不要有中文,有可能识别不出来
4.将所有零件导出后,需要记录每个坐标点相对于原点坐标的位置(这个非常重要),有需要的可以将DH参数表做出来以供后面使用
5.至此,SolidWorks篇结束,后续我也不知道什么时候更新代码篇。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









