






道路养护是保障交通命脉安全的隐形防线,其重要性不亚于道路建设本身。我国每年因道路病害引发的交通事故占比高达12%,及时修复1平方米的早期裂缝可避免后续数万元的修复成本。在这场与道路病害赛跑的战役中,传统养护模式正遭遇前所未有的挑战,而人工智能与无人机技术的融合应用,正在重构道路养护的底层逻辑。
一、传统巡检困境:人力与效率的掣肘
传统道路巡检高度依赖"老师傅"的经验判断,养护工需驾驶巡检车以低于60km/h的速度逐段排查,日均有效巡检里程不足80公里。这种模式存在三重先天缺陷:其一,人工目检存在30%以上的漏检率,尤其在下雨、夜间等恶劣环境下效率骤降;其二,从发现病害到修复的平均响应周期长达72小时,期间病害可能持续扩展;其三,养护工需长时间暴露在车流中作业,存在重大安全隐患。
某市政公司测算显示,要维持100公里高速公路的常规养护,需配置3台巡检车、6名专业人员,年直接成本超过400万元。这种重资产运营模式在应对突发灾害时更显捉襟见肘,暴雨过后常出现数十处积水点,传统巡检团队需3-5天才能完成全域排查。
二、技术赋能:无人机巡检的颠覆性突破
搭载多光谱成像仪与边缘计算模块的无人机系统,正在重塑道路养护的作业范式。以深圳试点项目为例,单架无人机可在2小时内完成20公里双向6车道路面的毫米级扫描,效率提升8倍。其核心技术突破体现在三个方面:
多维感知矩阵:结合4K视频流与三维点云数据,构建路面数字孪生模型,裂缝识别精度达0.2mm,可穿透积水识别深层结构损伤
边缘-云协同计算:机载算力盒子实现实时图像分析,遇疑似病害立即触发多角度复拍,关键数据同步回传至养护平台
智能决策系统:AI模型自动关联病害类型与养护方案库,生成包含优先级、材料需求、施工时段建议的智能工单
在极端天气场景下,无人机可突破人工巡检的物理限制。去年郑州暴雨期间,无人机集群在4小时内完成全城高架快速路巡检,发现12处桥体渗水隐患,为应急抢险赢得关键窗口期。
三、体系重构:从被动响应到主动预防
无人机巡检催生的不仅是效率革命,更是养护理念的质变。通过持续的数据积累,AI系统开始展现预测性养护能力:
时空演化模型:分析病害发展轨迹,预测未来72小时裂缝扩展概率,提前调度养护资源
交通流耦合分析:识别重载车辆频繁作用路段,动态调整巡检密度
全生命周期管理:建立道路数字档案,精准预测路面使用寿命,优化大中修计划
在长三角某智慧公路示范区,无人机巡检使预防性养护比例从35%提升至78%,道路服役寿命延长40%,年养护成本降低26%。这种降本增效不仅体现在经济维度,更转化为显著的碳减排效益——据测算,每减少1公里道路大修,可降低碳排放约12吨。本文正是在这样的思考背景下,想要从实验的角度来探索构建无人机航拍场景下的路面病害缺陷智能化检测识别系统,在前文中我们已经进行了相关的开发实践感兴趣的话可以自行移步阅读即可:
《无人机助力道路智能养护,基于YOLOv5全系列【n/s/m/l/x】参数模型开发构建无人机航拍道路交通场景下水泥路面缺陷智能检测识别系统》
《无人机助力道路智能养护,基于YOLOv7全系列【tiny/l/x】参数模型开发构建无人机航拍道路交通场景下水泥路面缺陷智能检测识别系统》
《无人机助力道路智能养护,基于YOLOv8全系列【n/s/m/l/x】参数模型开发构建无人机航拍道路交通场景下水泥路面缺陷智能检测识别系统》
《无人机助力道路智能养护,基于YOLOv9全系列【yolov9/t/s/m/c/e】参数模型开发构建无人机航拍道路交通场景下水泥路面缺陷智能检测识别系统》
《无人机助力道路智能养护,基于YOLOv10全系列【n/s/m/b/l/x】参数模型开发构建无人机航拍道路交通场景下水泥路面缺陷智能检测识别系统》
《无人机助力道路智能养护,基于YOLOv11全系列【n/s/m/l/x】参数模型开发构建无人机航拍道路交通场景下水泥路面缺陷智能检测识别系统》
本文主要是想要基于YOLO系列最新的目标检测模型YOLOv12全系列的模型来进行相应的开发实践,首先看下实例效果:
接下来看下实例数据:
YOLO系列最近的迭代速度不可谓不快,可能感觉YOLOv11都还没有推出多久,YOLOv12就这么水灵灵地来了,下面是对YOLOv12论文的阅读记录,感兴趣的话可以自行移步阅读即可:
官方发布的预训练权重如下:
Turbo (default version):
| Model | size (pixels) | mAPval 50-95 | Speed T4 TensorRT10 | params (M) | FLOPs (G) |
|---|---|---|---|---|---|
| YOLO12n | 640 | 40.4 | 1.60 | 2.5 | 6.0 |
| YOLO12s | 640 | 47.6 | 2.42 | 9.1 | 19.4 |
| YOLO12m | 640 | 52.5 | 4.27 | 19.6 | 59.8 |
| YOLO12l | 640 | 53.8 | 5.83 | 26.5 | 82.4 |
| YOLO12x | 640 | 55.4 | 10.38 | 59.3 | 184.6 |
v1.0:
| Model | size (pixels) | mAPval 50-95 | Speed T4 TensorRT10 | params (M) | FLOPs (G) |
|---|---|---|---|---|---|
| YOLO12n | 640 | 40.6 | 1.64 | 2.6 | 6.5 |
| YOLO12s | 640 | 48.0 | 2.61 | 9.3 | 21.4 |
| YOLO12m | 640 | 52.5 | 4.86 | 20.2 | 67.5 |
| YOLO12l | 640 | 53.7 | 6.77 | 26.4 | 88.9 |
| YOLO12x | 640 | 55.2 | 11.79 | 59.1 | 199.0 |
一共提供了n、s、m、l和x五款不同参数量级的模型。
这里我们保持完全相同的实验参数设置来进行四款模型的开发训练,等待训练完成之后我们来整体进行各项指标的对比分析。
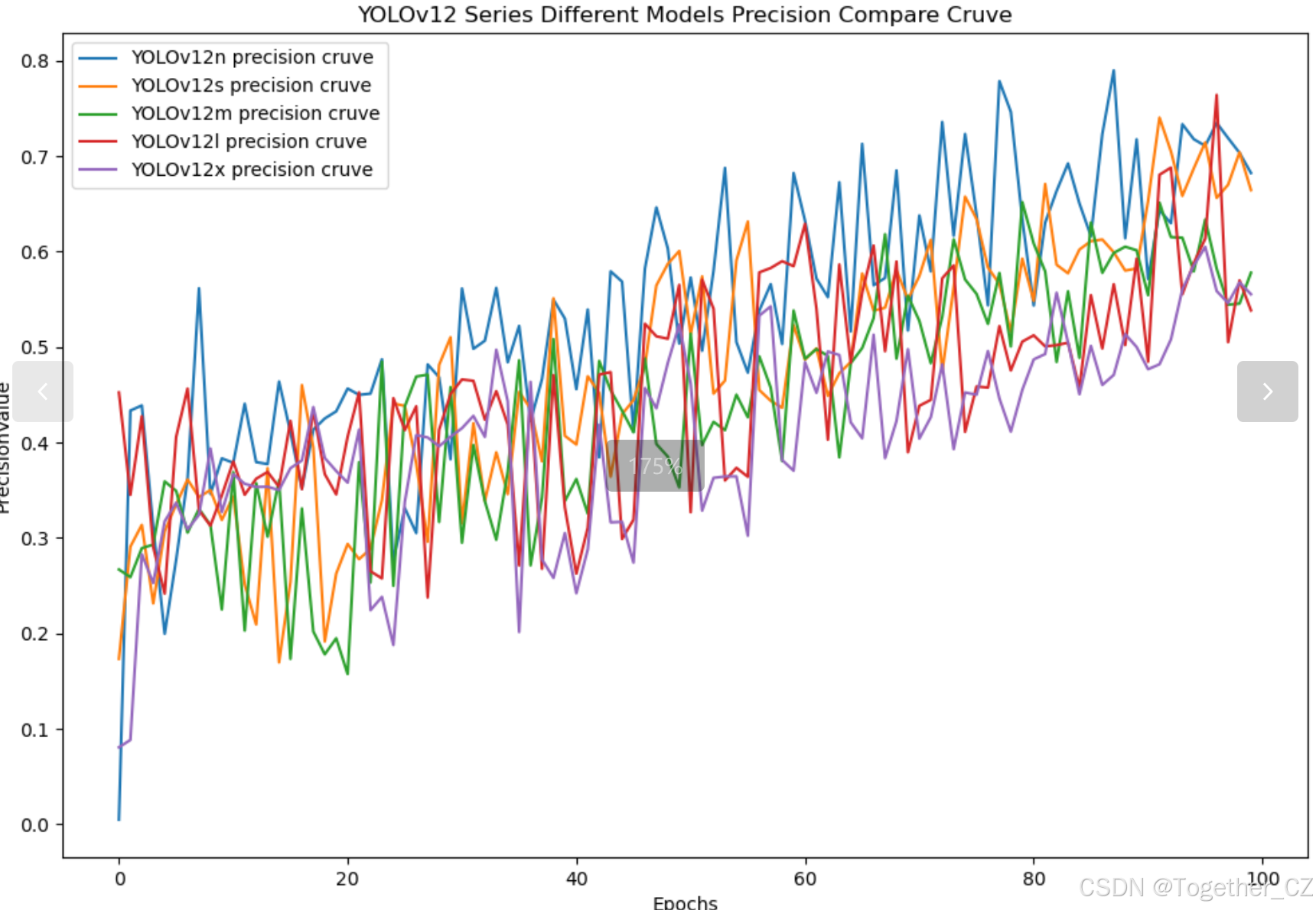
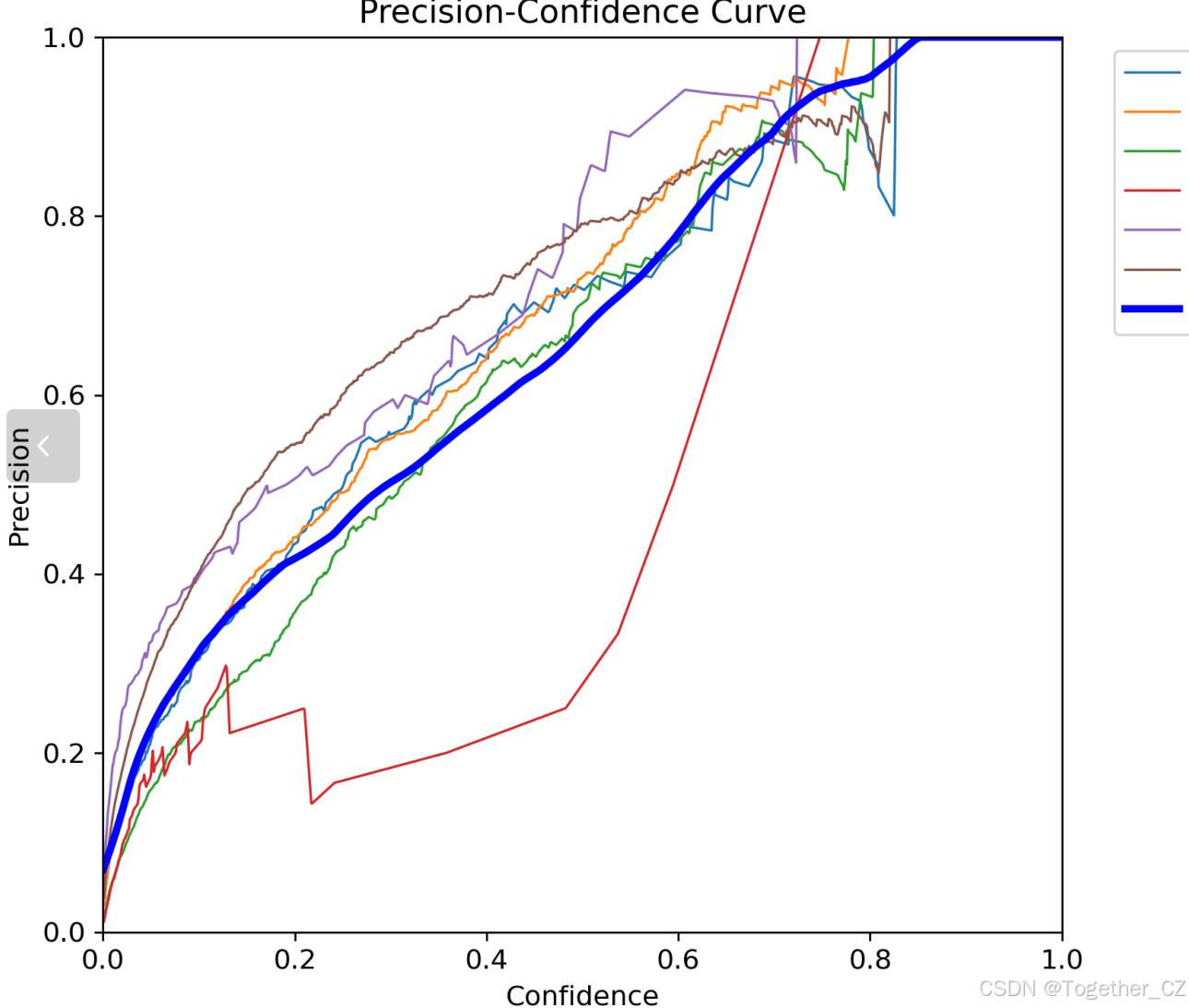
【Precision曲线】
精确率曲线(Precision Curve)是一种用于评估二分类模型在不同阈值下的精确率性能的可视化工具。它通过绘制不同阈值下的精确率和召回率之间的关系图来帮助我们了解模型在不同阈值下的表现。
精确率(Precision)是指被正确预测为正例的样本数占所有预测为正例的样本数的比例。召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。
绘制精确率曲线的步骤如下:
使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。
对于每个阈值,计算相应的精确率和召回率。
将每个阈值下的精确率和召回率绘制在同一个图表上,形成精确率曲线。
根据精确率曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。
通过观察精确率曲线,我们可以根据需求确定最佳的阈值,以平衡精确率和召回率。较高的精确率意味着较少的误报,而较高的召回率则表示较少的漏报。根据具体的业务需求和成本权衡,可以在曲线上选择合适的操作点或阈值。
精确率曲线通常与召回率曲线(Recall Curve)一起使用,以提供更全面的分类器性能分析,并帮助评估和比较不同模型的性能。
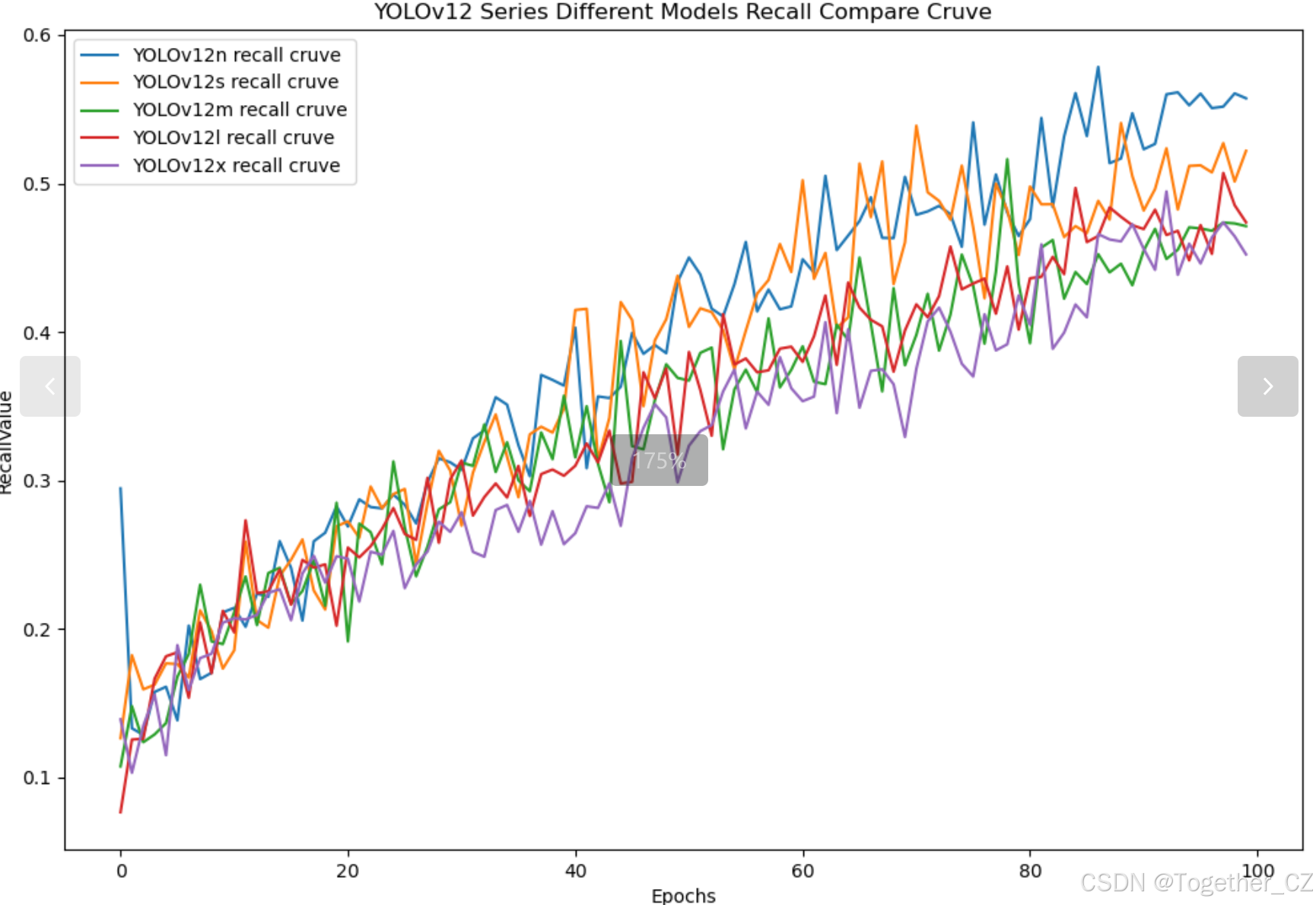
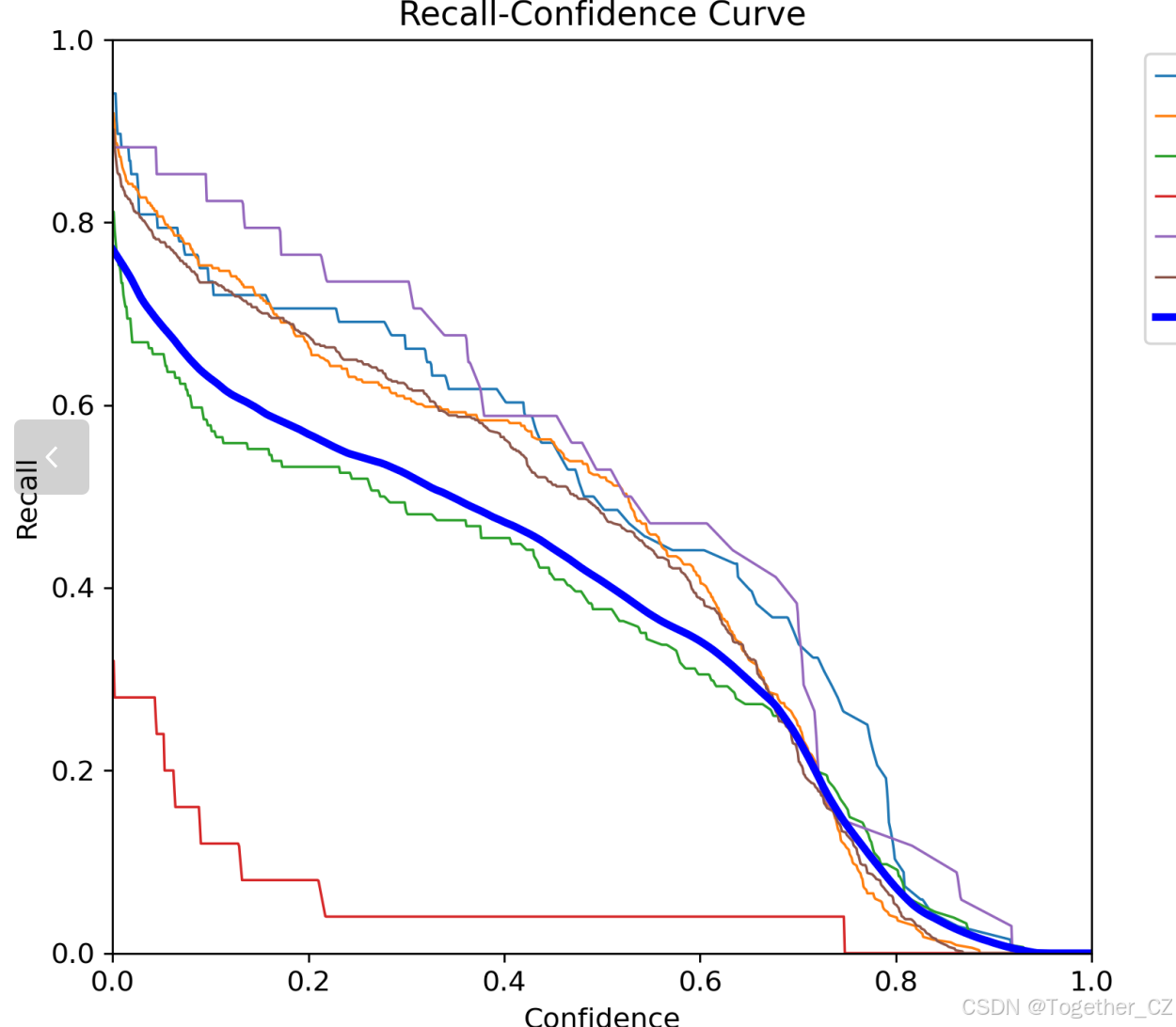
【Recall曲线】
召回率曲线(Recall Curve)是一种用于评估二分类模型在不同阈值下的召回率性能的可视化工具。它通过绘制不同阈值下的召回率和对应的精确率之间的关系图来帮助我们了解模型在不同阈值下的表现。
召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。召回率也被称为灵敏度(Sensitivity)或真正例率(True Positive Rate)。
绘制召回率曲线的步骤如下:
使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。
对于每个阈值,计算相应的召回率和对应的精确率。
将每个阈值下的召回率和精确率绘制在同一个图表上,形成召回率曲线。
根据召回率曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。
通过观察召回率曲线,我们可以根据需求确定最佳的阈值,以平衡召回率和精确率。较高的召回率表示较少的漏报,而较高的精确率意味着较少的误报。根据具体的业务需求和成本权衡,可以在曲线上选择合适的操作点或阈值。
召回率曲线通常与精确率曲线(Precision Curve)一起使用,以提供更全面的分类器性能分析,并帮助评估和比较不同模型的性能。
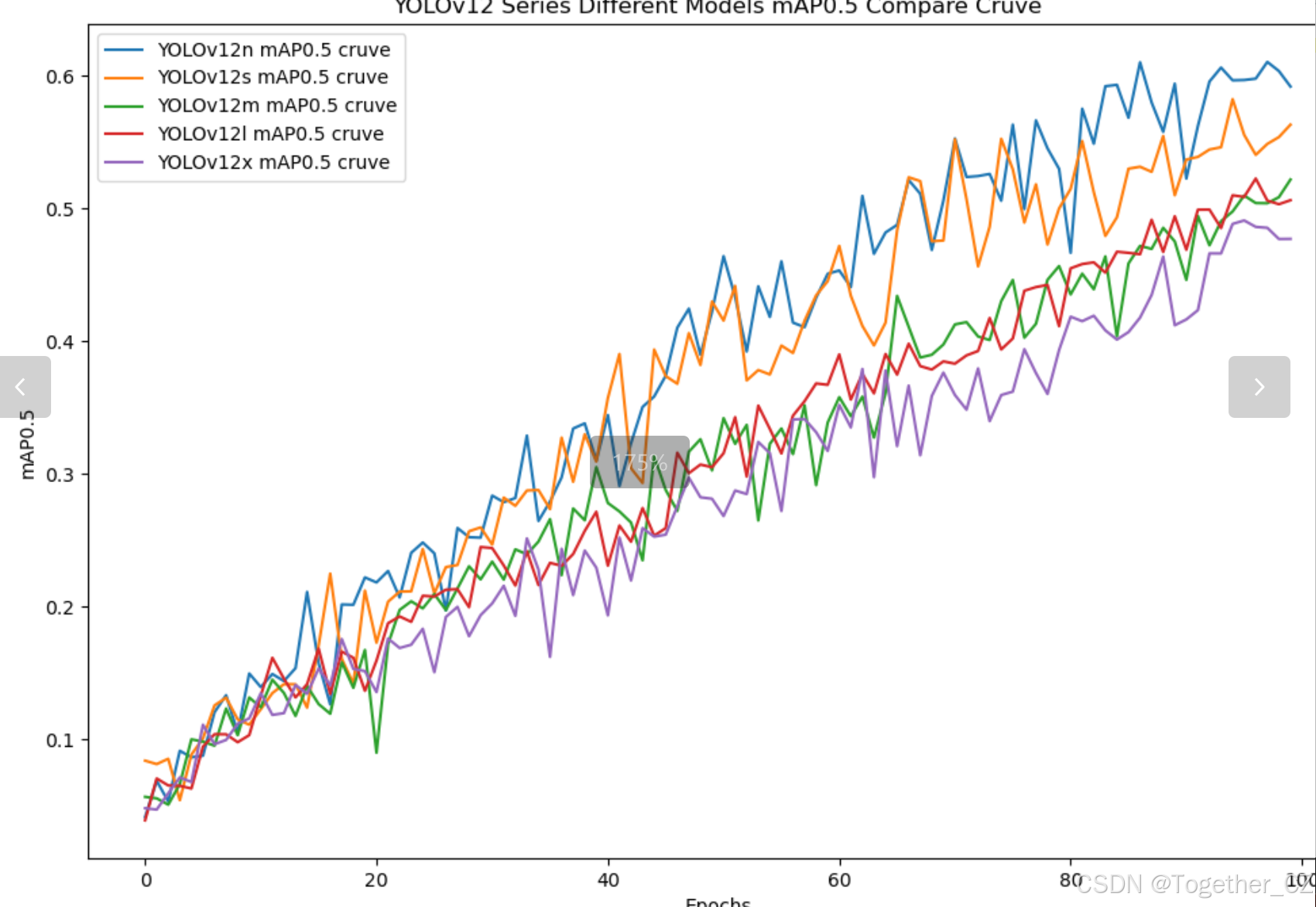
【mAP0.5】
mAP0.5,也被称为mAP@0.5或AP50,指的是当Intersection over Union(IoU)阈值为0.5时的平均精度(mean Average Precision)。IoU是一个用于衡量预测边界框与真实边界框之间重叠程度的指标,其值范围在0到1之间。当IoU值为0.5时,意味着预测框与真实框至少有50%的重叠部分。
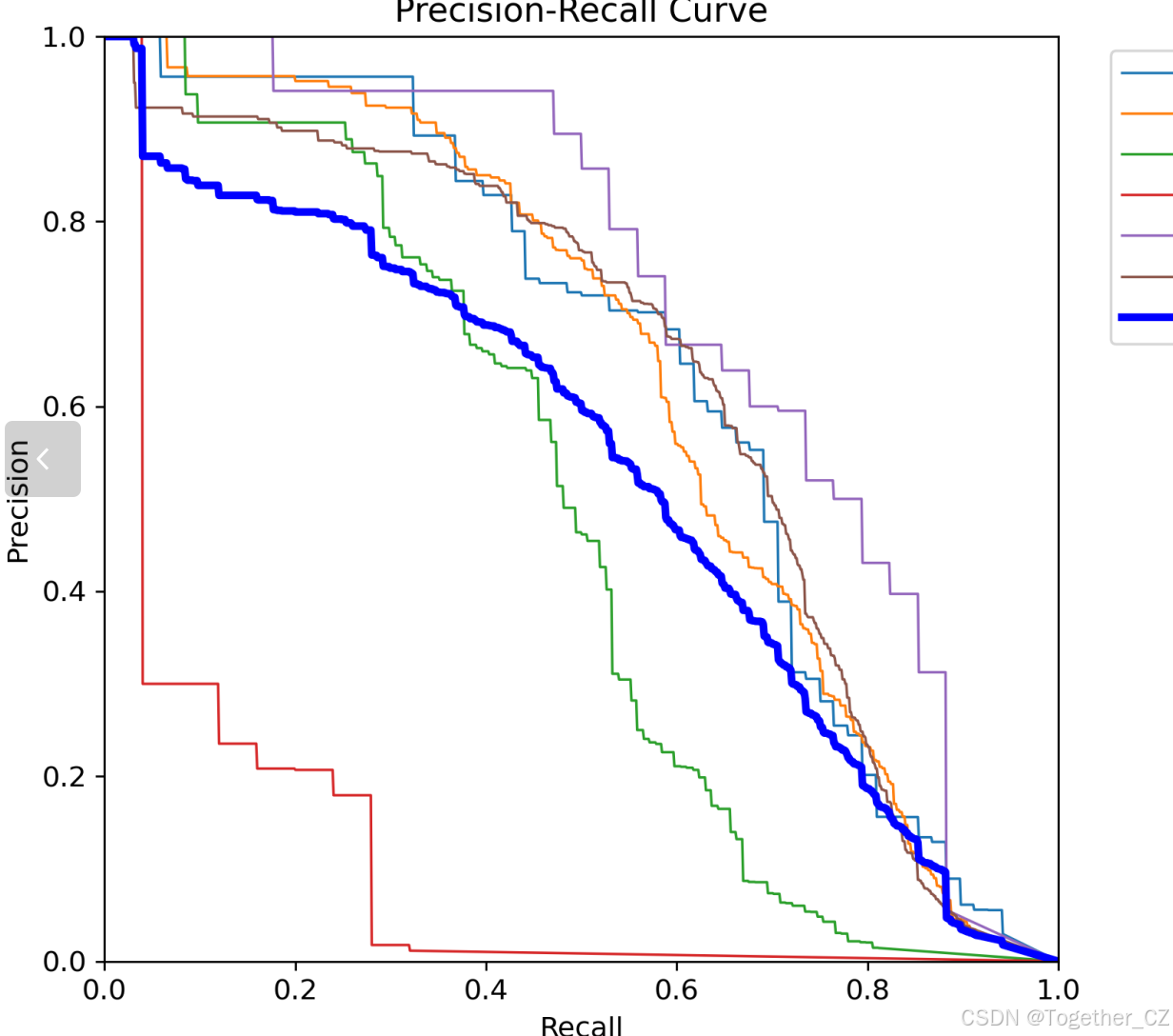
在计算mAP0.5时,首先会为每个类别计算所有图片的AP(Average Precision),然后将所有类别的AP值求平均,得到mAP0.5。AP是Precision-Recall Curve曲线下面的面积,这个面积越大,说明AP的值越大,类别的检测精度就越高。
mAP0.5主要关注模型在IoU阈值为0.5时的性能,当mAP0.5的值很高时,说明算法能够准确检测到物体的位置,并且将其与真实标注框的IoU值超过了阈值0.5。
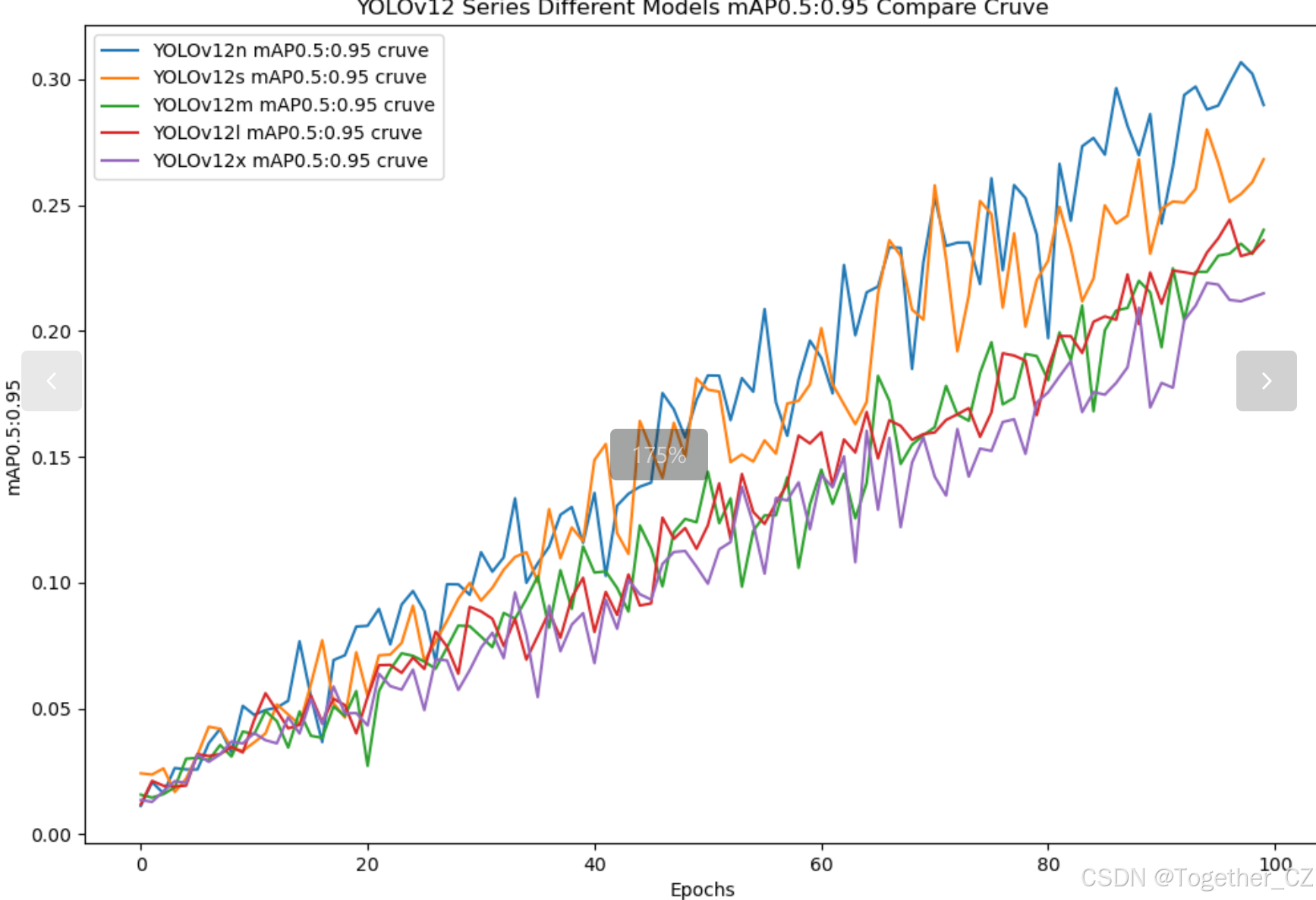
【mAP0.5:0.95】
mAP0.5:0.95,也被称为mAP@[0.5:0.95]或AP@[0.5:0.95],表示在IoU阈值从0.5到0.95变化时,取各个阈值对应的mAP的平均值。具体来说,它会在IoU阈值从0.5开始,以0.05为步长,逐步增加到0.95,并在每个阈值下计算mAP,然后将这些mAP值求平均。
这个指标考虑了多个IoU阈值下的平均精度,从而更全面、更准确地评估模型性能。当mAP0.5:0.95的值很高时,说明算法在不同阈值下的检测结果均非常准确,覆盖面广,可以适应不同的场景和应用需求。
对于一些需求比较高的场合,比如安全监控等领域,需要保证高的准确率和召回率,这时mAP0.5:0.95可能更适合作为模型的评价标准。
综上所述,mAP0.5和mAP0.5:0.95都是用于评估目标检测模型性能的重要指标,但它们的关注点有所不同。mAP0.5主要关注模型在IoU阈值为0.5时的性能,而mAP0.5:0.95则考虑了多个IoU阈值下的平均精度,从而更全面、更准确地评估模型性能。
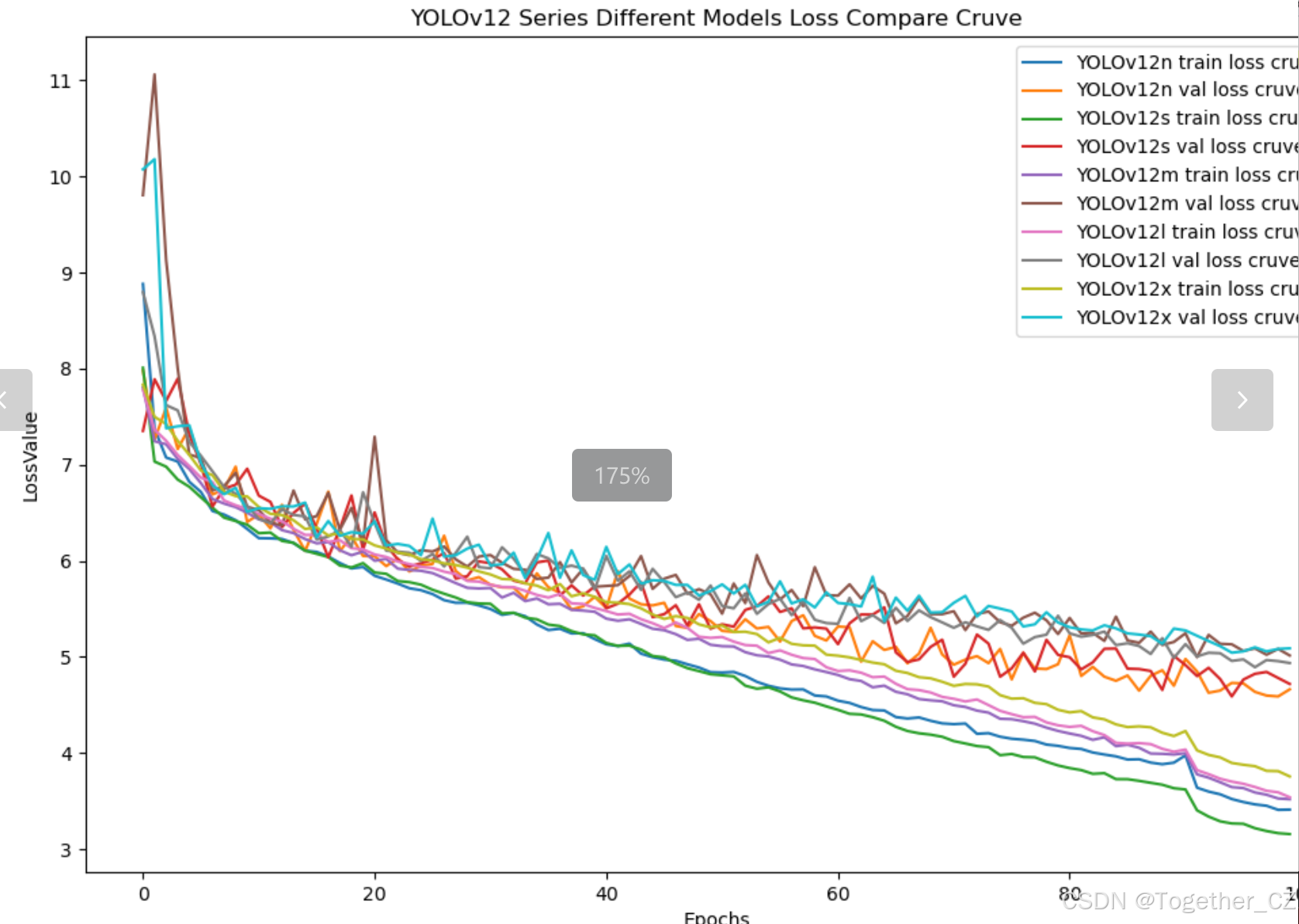
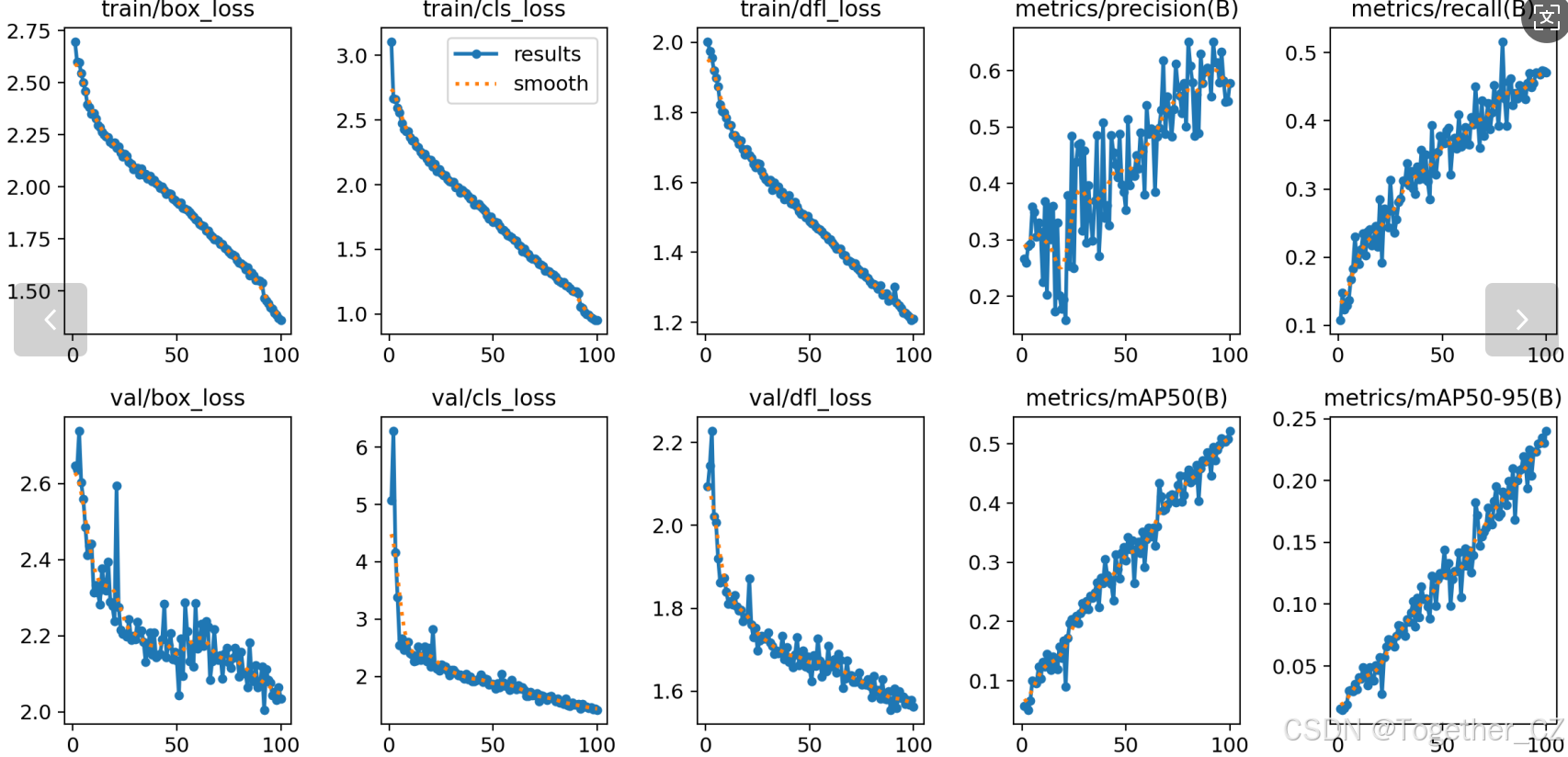
【loss曲线】
在深度学习的训练过程中,loss函数用于衡量模型预测结果与实际标签之间的差异。loss曲线则是通过记录每个epoch(或者迭代步数)的loss值,并将其以图形化的方式展现出来,以便我们更好地理解和分析模型的训练过程。
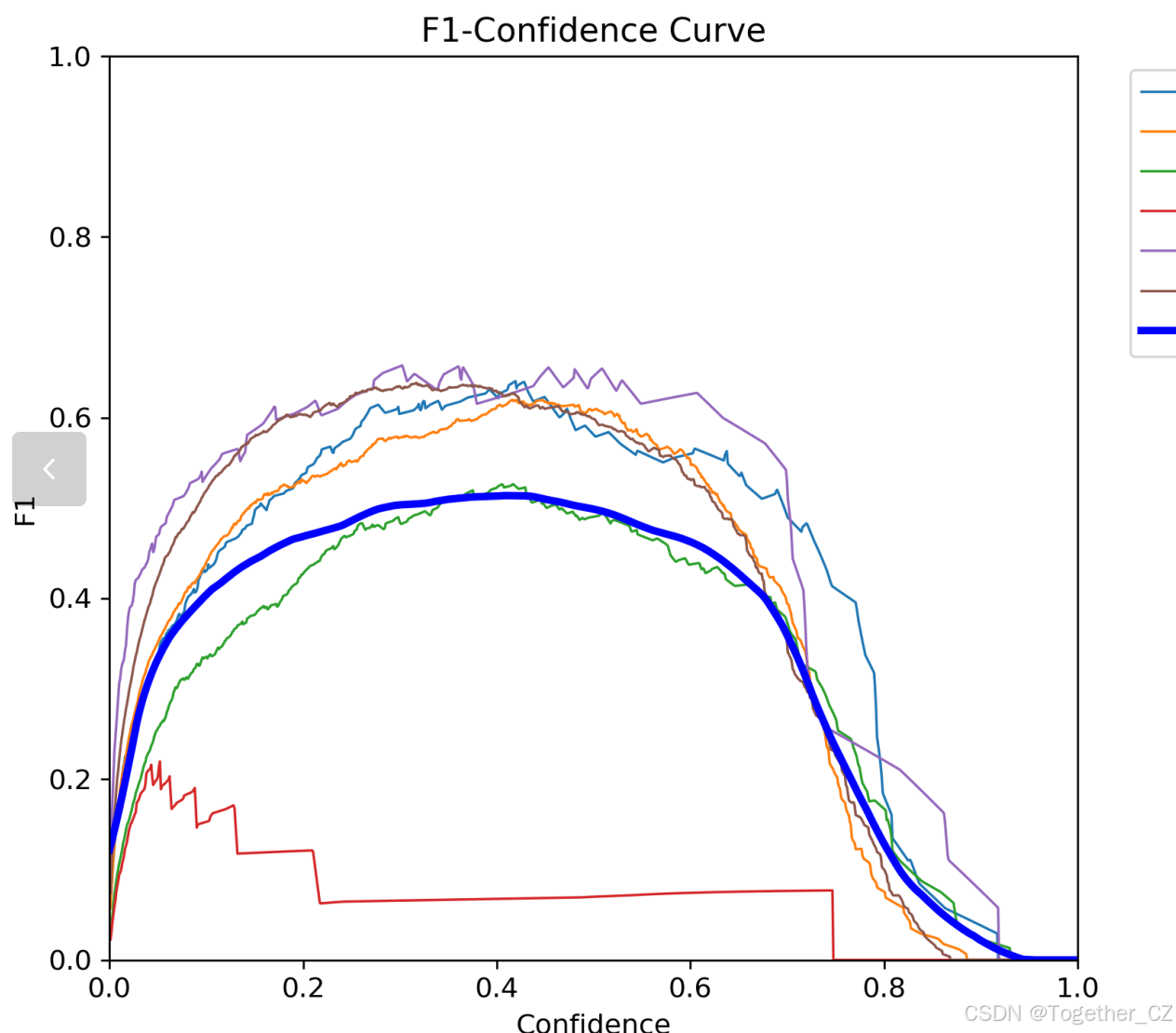
【F1值曲线】
F1值曲线是一种用于评估二分类模型在不同阈值下的性能的可视化工具。它通过绘制不同阈值下的精确率(Precision)、召回率(Recall)和F1分数的关系图来帮助我们理解模型的整体性能。
F1分数是精确率和召回率的调和平均值,它综合考虑了两者的性能指标。F1值曲线可以帮助我们确定在不同精确率和召回率之间找到一个平衡点,以选择最佳的阈值。
绘制F1值曲线的步骤如下:
使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。
对于每个阈值,计算相应的精确率、召回率和F1分数。
将每个阈值下的精确率、召回率和F1分数绘制在同一个图表上,形成F1值曲线。
根据F1值曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。
F1值曲线通常与接收者操作特征曲线(ROC曲线)一起使用,以帮助评估和比较不同模型的性能。它们提供了更全面的分类器性能分析,可以根据具体应用场景来选择合适的模型和阈值设置。
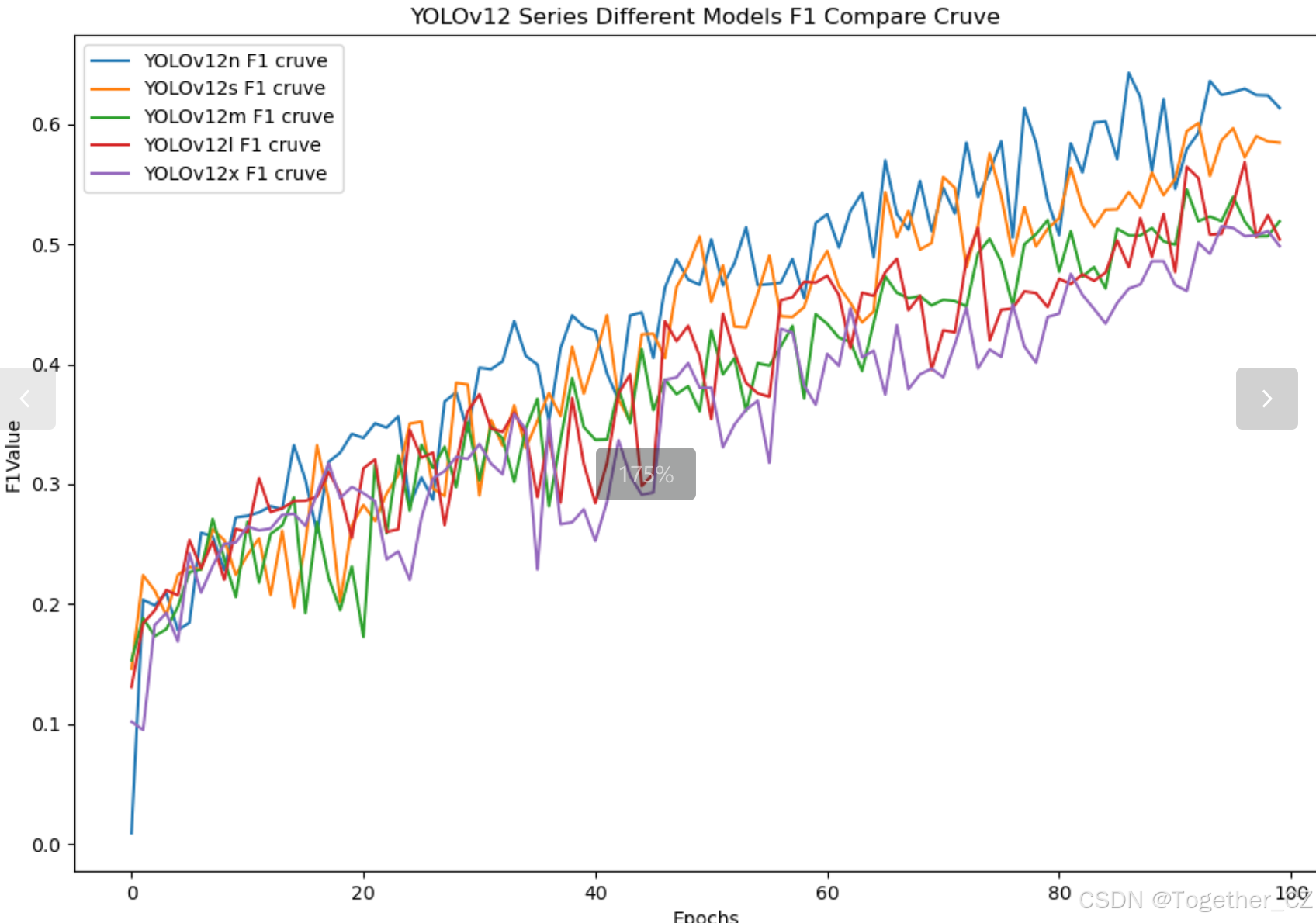
整体对比分析来看:不难发现五款不同参数量级的模型最终达到了较为相似的结果,没有拉开非常大的差距,这里综合参数量考虑我们最终选定了s系列的模型来作为线上的推理计算模型。
接下来看下s系列模型的详细情况。
【离线推理实例】

【Batch实例】

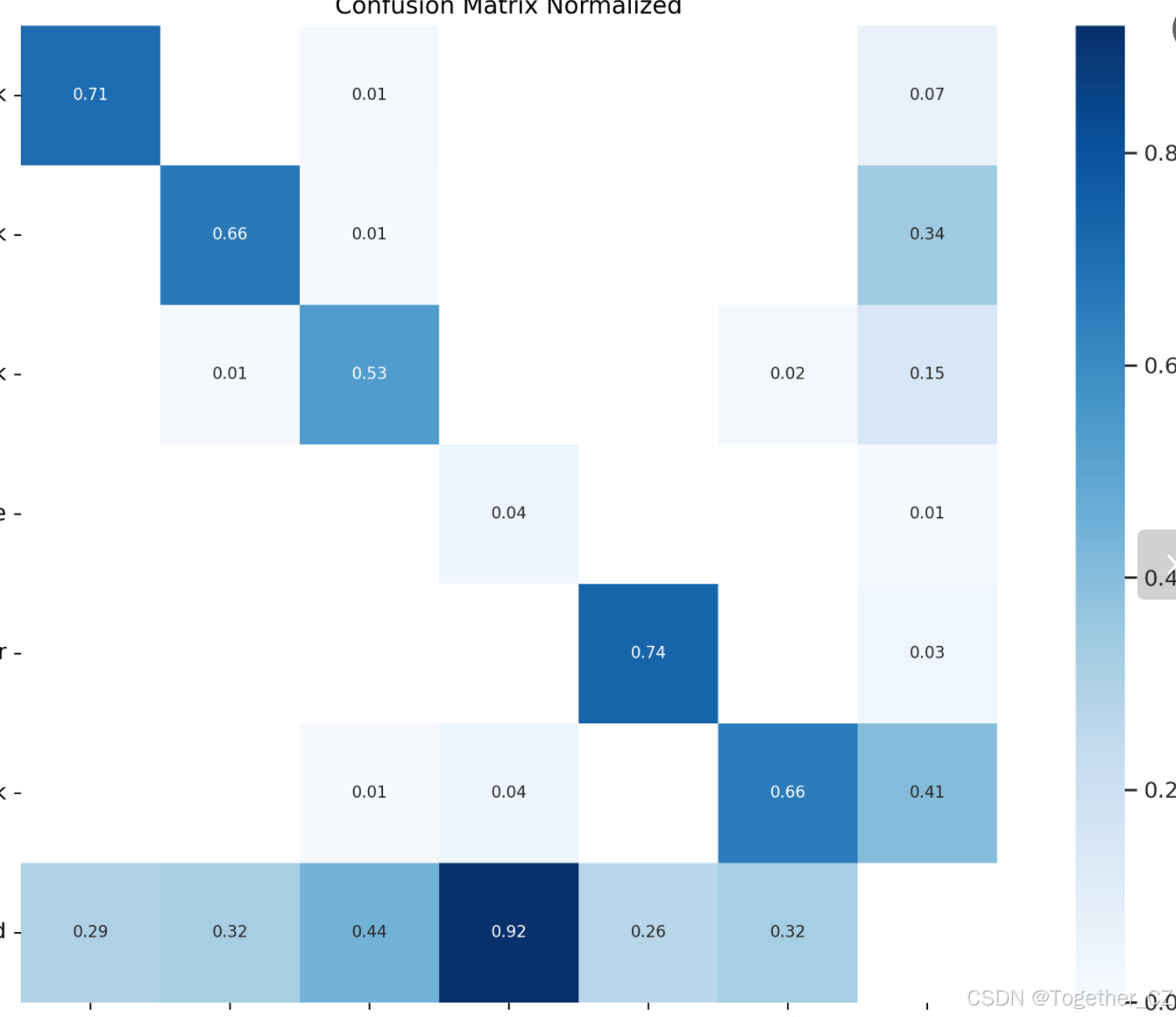
【混淆矩阵】
【F1值曲线】
【Precision曲线】
【PR曲线】
【Recall曲线】
【训练可视化】
感兴趣的话也都可以自行动手尝试下!本文仅作为抛砖引玉,从实验的角度进行基础的实践开发尝试,距离真正落地应用还有很长的路要走,不过科技发展的趋势就应该是赋能作业生产,提质增效的同时降低安全隐患。随着无人机续航突破90分钟、5G网络全域覆盖、数字孪生城市建模精度达到厘米级,道路巡检正在向立体化、智能化方向演进。可以预见三个发展趋势:
巡检网络智能化:无人机自动机场与车路协同系统融合,实现"发现即响应"的闭环管理
多源数据融合:整合气象卫星、地质监测、交通流量等多维度数据,构建道路健康度指数
服务场景延伸:从病害检测向交通优化扩展,动态调整限速、车流引导等参数,提升道路通行效率
这种技术演进正在重塑道路养护产业生态。传统养护企业正从"人力密集型"向"技术密集型"转型,无人机运营商、算法提供商、数据服务商等新角色不断涌现,催生出百亿级的新型服务市场。道路养护的智慧化转型,本质是交通基础设施数字化升级的微观缩影。当无人机在百米高空织就的"天网"与地下管廊的"地网"交融,当AI算法在云端构建的"数字道路"与物理世界实时互动,我们正在见证的,不仅是养护模式的革新,更是未来交通体系的雏形。在这场静悄悄的交通革命中,每一公里道路都在成为会思考、能呼吸的智慧生命体。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











