






欧姆龙, PLC CJ2M标准程序,一共控制12个伺服电机,气缸若干,包含轴点动,回零,相对与绝对定位,整个项目的模块都有:主控程序,复位程序,手动,生产计数,只要弄明白这个程序,就可以非常了解整个项目的程序如何去编写,从哪里开始下手,可提供程序问题解答,程序流程清晰明了;程序还有与机器人通讯,包含有触摸屏与电路图
欧姆龙,PLC CJ2M标准程序,是集控制12个伺服电机和若干气缸的整个项目的核心。其模块包括主控程序、复位程序、手动、生产计数等多个部分。只要掌握了这个程序,就可以深入了解项目的编写方式和从哪里入手。本文将详细介绍该程序的相关技术要点和流程。
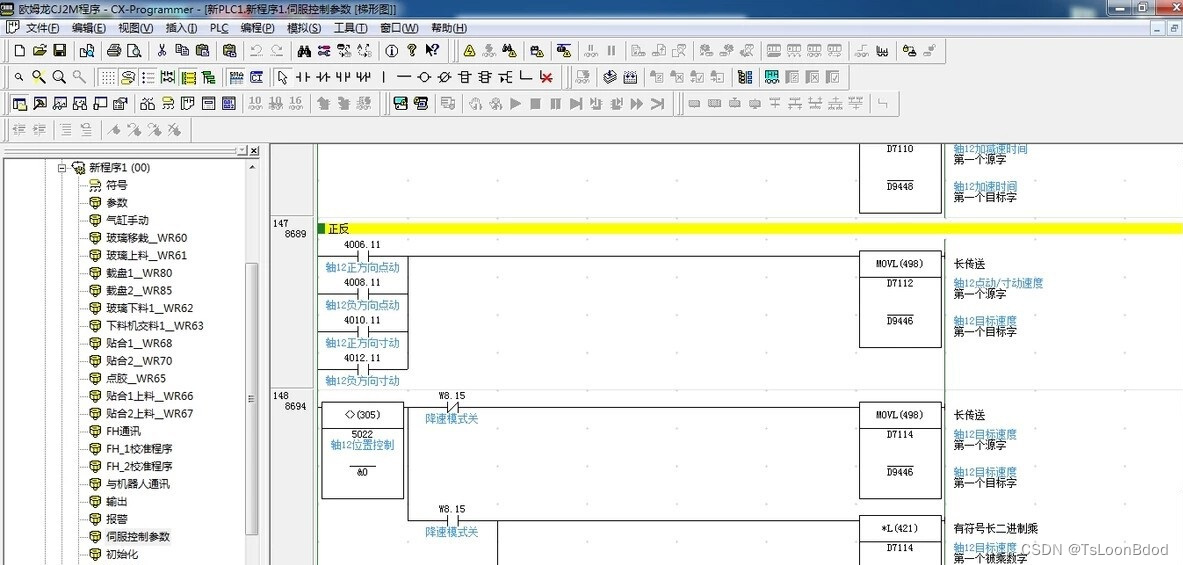
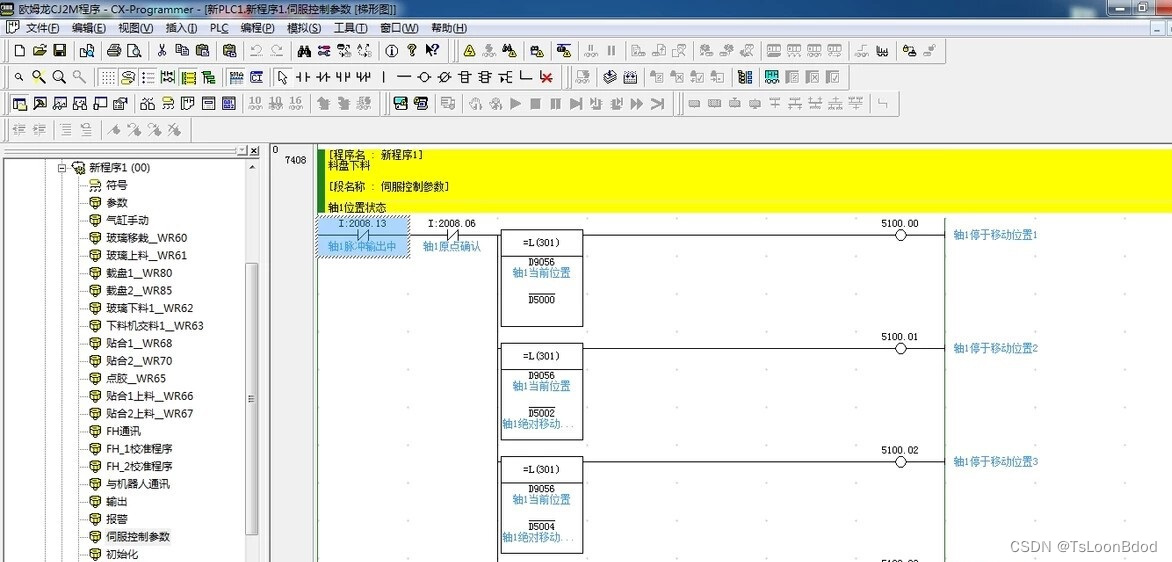
从整体上看,该程序的主要功能包括轴点动、回零、相对与绝对定位等多个方面。其中,轴点动是指使电机按一定步长进行工作;回零则是使电机回到初始位置;相对与绝对定位则是指按照设定的坐标系进行定位。
对于这些功能,在程序编写中需要进行不同的操作和控制。例如,在轴点动功能中,需要调用伺服电机控制模块对电机进行控制,包括输出脉冲信号、控制电机方向等;而在回零功能中,则需要对电机进行初始位置的设置和相关运动控制。对于定位功能,则需要按照预设的坐标系进行轨迹控制和定位。
除了以上的基本功能外,该程序还需要与机器人进行通讯,这也是技术难点之一。机器人通讯一般需要使用特定的通讯协议,可以选择串口通讯或者以太网通讯进行。在具体编写中,需要根据机器人的技术规格和要求进行相关配置和操作。同时,该程序还包含触摸屏与电路图等多个部分,需要进行相应的调试和维护。
在实际的编写过程中,需要遵循其程序流程,进行严格的逻辑控制和细致的细节处理。例如,在控制伺服电机时,需要对输出信号进行精确的计算和控制,以确保电机能够按照预期进行运动。此外,还需要根据实际情况进行错误处理和异常处理等。
总的来说,欧姆龙,PLC CJ2M标准程序是一个复杂而庞大的项目,需要进行细致的技术分析和处理。本文提供了一个整体的技术框架和流程,希望能够对广大程序员们在编写类似程序时提供一定的参考和帮助。
相关代码,程序地址:http://lanzouw.top/643659213449.html
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









