







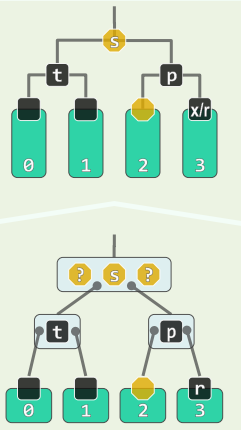
一、伸展树
1.逐层伸展
1.1 局部性/Locality:刚被访问过的数据,极有可能很快地再次被访问
1.2 BST的局部性
-
时间:刚被访问过的节点,极有可能很快地再次被访问
-
空间:下一将要访问的节点,极有可能就在刚被访问过节点的附近
-
对AVL连续的m次查找(m >> n),共需 O ( m ⋅ log n ) O(m·\log n) O(m⋅logn)时间
-
自适应链表:节点一旦被访问,随即移动到最前端
-
模仿:BST的节点一旦被访问,随即调整到树根
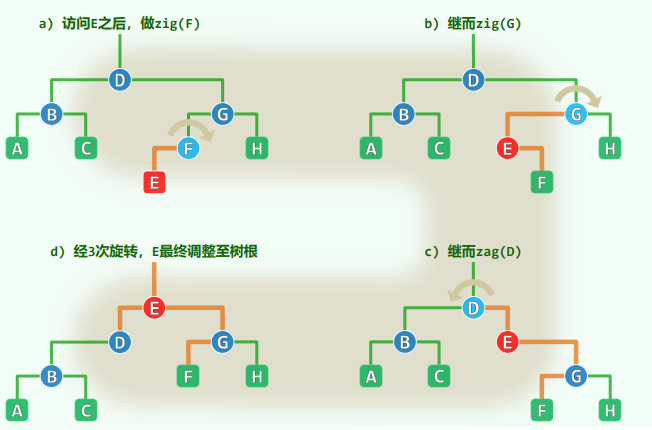
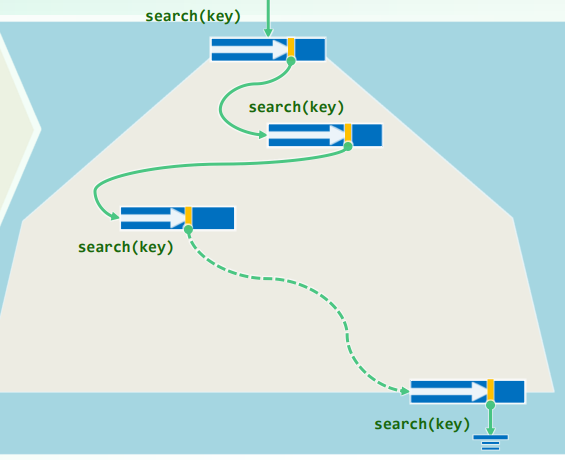
1.3 逐层伸展

-
节点v一旦被访问 随即被推送至根
-
与其说“推”,不如说“爬” 一步一步地往上爬
-
自下而上,逐层旋转
- zig( v−>parent )
- zag( v−>parent )
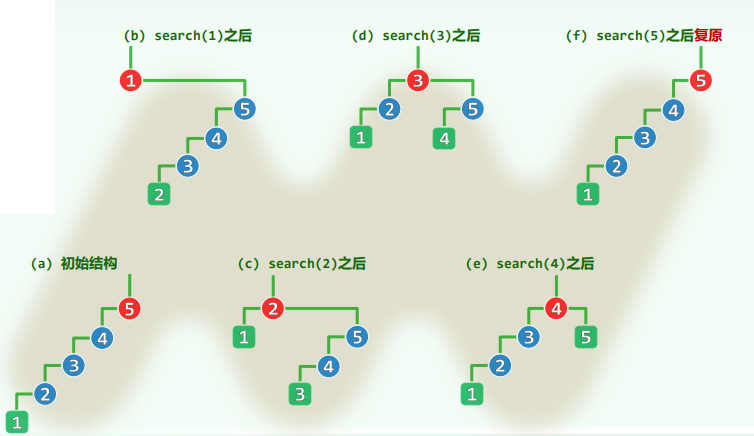
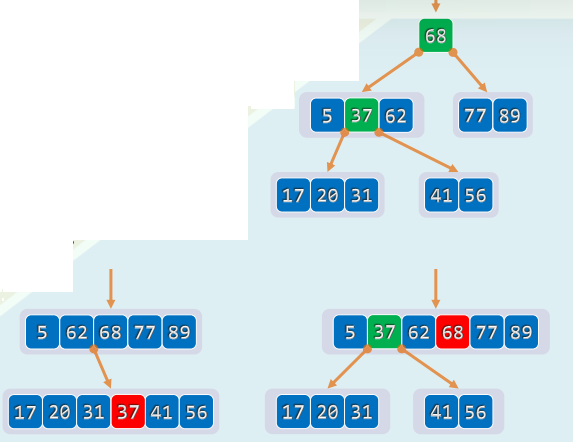
1.4 实例
- 伸展过程的效率这取决于
- 树的初始形态和
- 节点的访问次序
1.5 最坏情况
- 旋转次数呈周期性的算术级数
- 每一周期累计 Ω ( n 2 ) Ω(n^2) Ω(n2)分,分摊 Ω ( n ) Ω(n) Ω(n)
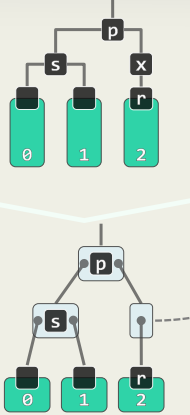
2.双层伸展
2.1 双层伸展
- 构思的精髓:向上追溯两层,而非一层
- 反复考察祖孙三代: g = parent§, p = parent(v), v
- 根据它们的相对位置,经两次旋转,使v上升两层,成为(子)树根
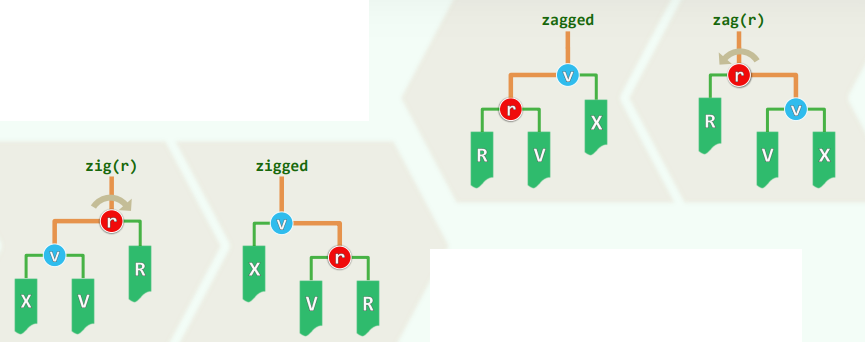
2.2 zig-zag / zag-zig
- 时的v按中序遍历次序居中


- 节点访问之后,对应路径的长度随即折半
- 最坏情况不致持续发生,伸展操作分摊仅需 要是 v 只有父亲,没有祖父呢?此时必有 v . p a r e n t ( ) = = T . r o o t ( ) O ( log n ) 要是v只有父亲,没有祖父呢?此时必有v.parent() == T.root()O(\log n) 要是v只有父亲,没有祖父呢?此时必有v.parent()==T.root()O(logn)时间

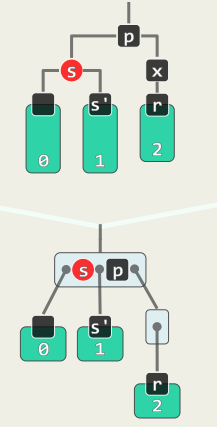
2.3 zig / zag
- 当v只有父亲,没有祖父,此时必有v.parent() == T.root()
- 只需做单次旋转:zig®或zag®
3.算法实现
3.1 接口
template<typename T> class Splay : public BST<T>{
protected:
BinNodePosi splay( BinNodePosi v ); //将v伸展至根
public: //伸展树的查找也会引起整树的结构调整,故search()也需重写
BinNodePosi<T> & search( const T & e ); //查找(重写)
BinNodePosi<T> insert( const T & e ); //插入(重写)
bool remove( const T & e ); //删除(重写)
};
3.2 伸展算法
template<typename T> BinNodePosic<T> Splay<T>::splay( BinNodePosi<T> v ) {
if ( ! v ) return NULL;
BinNodePosi<T> p; BinNodePosi<T> g;
while ( (p = v->parent) && (g = p->parent) ) {//自下而上,反复双层伸展
BinNodePosi<T> gg = g->parent; //每轮之后,v都将以原曾祖父为父
if ( IsLChild( * v ) )
if ( IsLChild( * p ) ) { /* zig-zig */
attachAsLC( p->rc, g ); //Y
attachAsLC( v->rc, p ); //X
attachAsRC( p, g );
attachAsRC( v, p )
}
else { /* zig-zag */ }
else
if ( IsRChild( * p ) ) { /* zag-zag */ }
else { /* zag-zig */ }
if ( !gg ) v->parent = NULL; //无曾祖父gg的v即为树根;否则,gg此后应以v为
else ( g == gg->lc ) ? attachAsLC(v, gg) : attachAsRC(gg, v); //左或右孩子
updateHeight( g ); updateHeight( p ); updateHeight( v );
}
if ( p = v->parent ) { /* 若p果真是根,只需再额外单旋一次 */ }
v->parent = NULL; return v; //伸展完成,v抵达树根
}
3.2 查找算法
template<typename T> BinNodePosi<T> & Splay<T>::search( const T & e ) {
// 调用标准BST的内部接口定位目标节点
BinNodePosi<T> p = BST::search( e );
// 无论成功与否,最后被访问的节点都将伸展至根
_root = splay( p ? p : _hot ); //成功、失败
// 总是返回根节点
return _root;
}
- 伸展树的查找,与常规BST::search()不同,很可能会改变树的拓扑结构,不再属于静态操作
3.3 插入算法
- 直观方法:先调用标准的BST::search(),再将新节点伸展至根
- Splay::search()已集成splay(),查找失败之后,_hot即是根
- 既如此,何不随即就在树根附近接入新节点

template<typename T> BinNodePosi<T> Splay<T>::insert( const T & e ) {
if ( !_root ) { _size = 1; return _root = new BinNode<T>( e ); } //原树为空
BinNodePosi<T> t = search( e );
if ( e == t->data ) return t; //t若存在,伸展至根
if ( t->data < e ) { //在右侧嫁接(rc或为空,lc == t必非空)
t->parent = _root = new BinNode<T>( e, NULL, t, t->rc );
if ( t->rc ) { t->rc->parent = _root; t->rc = NULL; }
}
else { //e < t->data,在左侧嫁接(lc或为空,rc == t必非空)
t->parent = _root = new BinNode<T>( e, NULL, t->lc, t );
if ( t->lc ) { t->lc->parent = _root; t->lc = NULL; }
}
_size++; updateHeightAbove( t ); return _root; //更新规模及t与_root的高度,插入成功
} //无论如何,返回时总有_root->data == e
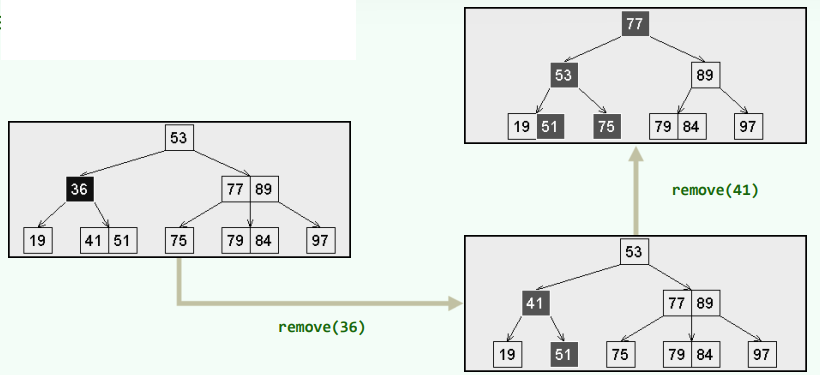
3.4 删除算法
- 直观方法:调用BST标准的删除算法,再将_hot伸展至根
- 注意到,Splay::search()成功之后,目标节点即是树根
- 既如此,何不随即就在树根附近完成目标节点的摘除

template<typename T> bool Splay<T>::remove( const T & e ) {
if ( !_root || ( e != search( e )->data ) ) return false; //若目标存在,则伸展至根
BinNodePosi L = _root->lc, R = _root->rc; release(t); //记下左、右子树后,释放之
if ( !R ) { //若R空
if ( L ) L->parent = NULL; _root = L; //则L即是余树
}
else { //否则
_root = R; R->parent = NULL; search( e ); //在R中再找e:注定失败,但最小节点必 if (L)
L->parent = _root; _root->lc = L; //伸展至根,故可令其以L作为左子树
}
_size--; if ( _root ) updateHeight( _root ); //更新记录
return true;
}
3.5 综合评价
-
无需记录高度或平衡因子;编程实现简单——优于AVL树,分摊复杂度 O ( log n ) O(\log n) O(logn)——与AVL树相当
-
局部性强、缓存命中率极高时(即k<< n << m)
- 效率甚至可以更高——自适应的 O ( log k ) O(\log k) O(logk)
- 任何连续的m次查找,仅需 时间 O ( m log k + n log n ) O(m\log k+n\log n) O(mlogk+nlogn)
-
若反复地顺序访问任一子集,分摊成本仅为常数
-
不能杜绝单次最坏情况,不适用于对效率敏感的场合
二、B-树
1.大数据
1.1 现实A:存储器容量的增长速度 << 应用问题规模的增长速度
- 1990: 10MB / 2MB = 5
- 2020: 10TB / 10GB = 1000
- 相对而言,存储器的容量 实际上在不断减小!
1.2 现实B:在特定工艺及成本下,存储器都是容量与速度的折中产物
- 存储器越大、越快,成本也越高
- 存储器容量越大/小,访问速度越慢/快
1.3 现实C:实用的存储系统,由不同类型的存储器级联而成,以综合其各自的优势
- 不同类型的存储器,容量、访问速度差异悬殊
| #cycles | sec | |
|---|---|---|
| CPU Register | 0 | ns |
| SRAM/cache | 4~75 | ns |
| DRAM/main memory | 10^2 | ns |
| DISK | 10^7 | ms |
- 若一次内存访问需要一秒,则一次磁盘访问就需一天,为避免一次磁盘访问,我们宁愿访问内存1000次
- 在分级的存储系统中,各类存储器有其各自的角色
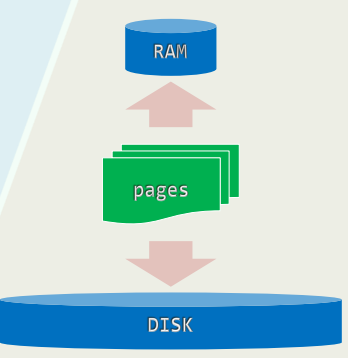
1.4 分级存储:利用数据访问的局部性
- 机制与策略
- 常用的数据,复制到更高层、更小的存储器中
- 找不到,才向更低层、更大的存储器索取
- 算法的实际运行时间,主要取决于相邻存储级别之间数据传输(I/O)的速度与次数
1.5 批量访问:在外存读写1B,与读写1KB几乎一样快
- 以页(page)或块(block)为单位,借助缓冲区,可大大缩短单位字节的平均访问时间
#include
#define BUFSIZ 512 //缓冲区默认容量
int setvbuf( //定制缓冲区
FILE* fp, //流
char* buf, //缓冲区
int _Mode, //_IOFBF | _IOLBF | _IONBF
size_t size //缓冲区容量
);
int fflush( FILE* fp ); //强制清空缓冲区
2.缓存
2.1 就地循环位移
- 仅用O(1)辅助空间,将数组A[0, n)中的元素向左循环移动k个单元
void shift( int * A, int n, int k )
2.2 蛮力版
void shift0( int * A, int n, int k ) //反复以1为间距循环左移 {
while ( k-- ) shift( A, n, 0, 1 );
} //共迭代k次,O(n*k)
2.3 迭代版
int shift( int * A, int n, int s, int k ) { // O( n / GCD(n, k) )
int b = A[s]; int i = s, j = (s + k) % n; int mov = 0; //mov记录移动次数
while ( s != j ) { //从A[s]出发,以k为间隔,依次左移k位
A[i] = A[j]; i = j; j = (j + k) % n; mov++;
}
A[i] = b; return mov + 1; //最后,起始元素转入对应位置
} //[0, n)由关于k的g = GCD(n, k)个同余类组成,shift(s, k)能够且只能够使其中之一就位
oid shift1(int* A, int n, int k) { //经多轮迭代,实现数组循环左移k位,累计O(n+g)
for (int s = 0, mov = 0; mov < n; s++) //O(g) = O(GCD(n, k))
mov += shift(A, n, s, k);
}

2.4 倒置版
void shift2( int * A, int n, int k ) {
reverse( A, k ); //O(3k/2)
reverse( A + k, n – k ); //O(3(n-k)/2)
reverse( A, n ); //O(3n/2)
} //O(3n)
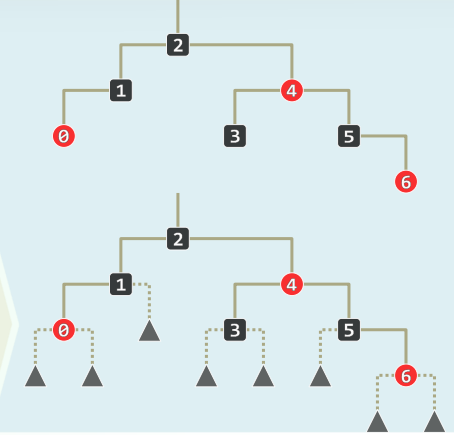
3.结构
3.1 等价变换
- 每d代合并为超级节点
- m = 2 d 2^d 2d 路
- m-1 个关键码
- 逻辑上与BBST完全等价

3.2 I/O优化:多级存储系统中使用B-树,可针对外部查找,大大减少I/O次数
-
对于AVL,若有n = 1G个记录
- 每次查找需要 log 2 1 0 9 ≈ 30 \log_{2} 10^9≈30 log2109≈30次I/O操作
- 每次只读出单个关键码,得不偿失
-
对于B-树
- 充分利用外存的批量访问,将此特点转化为优点
- 每下降一层,都以超级节点为单位,读入一组关键码
-
具体多大一组视磁盘的数据块大小而定,m = #keys / pg
- 比如,目前多数数据库系统采用 m = 200~300
-
回到上例,若取m = 256,则每次查找只需 log 256 1 0 9 ≤ 4 \log_{256}10^9≤4 log256109≤4次I/O
3.3 外部节点 + 叶子
- 所谓m阶B-树,即m路完全平衡搜索树(m ≥3)
- 外部节点的深度统一相等,约定以此深度作为树高h
- 叶节点的深度统一相等(h-1)
3.4 内部节点
- 各含 n ≤ m-1 个关键码: K 1 < K 2 < . . . < K n K_1<K_2<...<K_n K1<K2<...<Kn
- 各有n+1≤n个分支:A_0,A_1,…,A_n
- 反过来,分支数也不能太少
- 树根:2≤n+1
- 其余: ⌈ m / 2 ⌉ \lceil m/2 \rceil ⌈m/2⌉≤n+1
- 故亦称作( ⌈ m / 2 ⌉ , m \lceil m/2 \rceil,m ⌈m/2⌉,m)-树
3.5 紧凑表示
3.6 BTNode
template<typename T> struct BTNode { //B-树节点
BTNodePosi<T> parent;
Vector<T> key; //关键码(总比孩子少一个)
Vector< BTNodePosi<T>> child;
BTNode() { parent = NULL; child.insert( NULL ); }
BTNode( T e, BTNodePosi lc = NULL, BTNodePosi rc = NULL ) {
parent = NULL; //作为根节点
key.insert( e ); //仅一个关键码,以及
child.insert( lc ); if ( lc ) lc->parent = this; //左孩子
child.insert( rc ); if ( rc ) rc->parent = this; //右孩子
}
};
3.7 BTree
template<typename T> using BTNodePosi = BTNode<T>*; //B-树节点位置
template<typename T> class BTree {
protected:
int _size; int _m; BTNodePosi _root; //关键码总数、阶次、根
BTNodePosi<T> _hot; //search()最后访问的非空节点位置
void solveOverflow( BTNodePosi ); //因插入而上溢后的分裂处理
void solveUnderflow( BTNodePosi ); //因删除而下溢后的合并处理
public:
BTNodePosi<T> search( const T & e ); //查找
bool insert( const T & e ); //插入
bool remove( const T & e ); //删除
}
4.查找
4.1 算法
从(常驻RAM的)根节点开始
只要当前节点不是外部节点
在当前节点中顺序查找 //RAM内部
若找到目标关键码,则
返回查找成功
否则 //止于某一向下的引用
沿引用找到孩子节点
将其读入内存 //I/O耗时
返回查找失败
4.2 实现
template<typename T> BTNodePosi<T> BTree<T>::search( const T & e ) {
BTNodePosi<T> v = _root; _hot = NULL; //从根节点出发
while ( v ) { //逐层深入地
Rank r = v->key.search( e ); //在当前节点对应的向量中顺序查找
if ( 0 <= r && e == v->key[r] ) return v; //若成功,则返回;否则...
_hot = v; v = v->child[ r + 1 ]; //沿引用转至对应的下层子树,并载入其根(I/O)
} //若因!v而退出,则意味着抵达外部节点
return NULL; //失败 实现
}
4.3 性能
- 约定:根节点常驻RAM
- 忽略内存中的查找,运行时间主要取决于I/O次数
- 在每一深度至多一次I/O
- 故运行时间 = O ( log n ) O(\log n) O(logn)
- 可以证明: log m ( N + 1 ) ≤ h ≤ 1 + ⌊ log ⌊ m / 2 ⌋ ( N + 1 ) / 2 ⌋ \log_m(N+1)≤h≤1+\lfloor \log_{\lfloor m/2 \rfloor}(N+1)/2 \rfloor logm(N+1)≤h≤1+⌊log⌊m/2⌋(N+1)/2⌋
4.4 最大树高
- 内部节点应尽可能地“瘦”
- n k ≥ 2 ⋅ ⌈ m / 2 ⌉ k − 1 , ∀ k > 0 n_k≥2 · \lceil m/2 \rceil^{k-1},∀k>0 nk≥2⋅⌈m/2⌉k−1,∀k>0
- 考查外部节点所在的那层:
- N + 1 = n k ≥ 2 ⋅ ⌈ m / 2 ⌉ h − 1 N+1=n_k≥2 · \lceil m/2 \rceil^{h-1} N+1=nk≥2⋅⌈m/2⌉h−1
- h ≤ 1 + ⌊ log ⌈ m / 2 ⌉ ( N + 1 ) / 2 ⌋ = O ( log m N ) h≤1+\lfloor \log_{\lceil m/2 \rceil}(N+1)/2 \rfloor=O(\log_m N) h≤1+⌊log⌈m/2⌉(N+1)/2⌋=O(logmN)
- 相对于BBST: log ⌈ m / 2 ⌉ ( N / 2 ) / log 2 N = 1 / ( log 2 m − 1 ) \log_{\lceil m/2 \rceil}(N/2)/\log_2 N=1/(\log_2 m -1) log⌈m/2⌉(N/2)/log2N=1/(log2m−1)
4.5 最小树高
- 内部节点应尽可能“胖”
- n k ≤ m k , ∀ k > 0 n_k≤m^k,∀k>0 nk≤mk,∀k>0
- 依然,考查外部节点所在的那层
- N + 1 = n k ≤ m h N+1=n_k≤m^h N+1=nk≤mh
- h ≥ ⌈ log m ( N + 1 ) ⌉ = Ω ( l o g m N ) h≥\lceil \log_{m}(N+1)\rceil=Ω(log_m N) h≥⌈logm(N+1)⌉=Ω(logmN)
- 相对于BBST: ( log m N − 1 ) / log 2 N = log m 2 − log N 2 ≈ 1 / log 2 m (\log_m N-1)/\log_2 N=\log_m 2-\log_N 2≈1/\log_2 m (logmN−1)/log2N=logm2−logN2≈1/log2m
5.插入
5.1 算法
template<typename T> bool BTree<T>::insert( const T & e ) {
BTNodePosi<T> v = search( e );
if ( v ) return false; //确认e不存在
Rank r = _hot->key.search( e ); //在节点_hot中确定插入位置
_hot->key.insert( r+1, e ); //将新关键码插至对应的位置
_hot->child.insert( r+2, NULL ); _size++; //创建一个空子树指针
solveOverflow( _hot ); //若上溢,则分裂
return true; //插入成功
}
5.2 分裂
- 设上溢节点中的关键码依次为:{ k 0 , k 1 , . . . , k m − 1 k_0,k_1,...,k_{m-1} k0,k1,...,km−1}
- 取中位数 s = ⌊ m / 2 ⌋ s=\lfloor m/2 \rfloor s=⌊m/2⌋,以关键码 k s k_s ks为界划分为{ k 0 , k 1 , . . . , k s − 1 k_0,k_1,...,k_{s-1} k0,k1,...,ks−1} { k s k_s ks} { k s + 1 , . . . , k m − 1 k_{s+1},...,k_{m-1} ks+1,...,km−1}
- 关键码 k s k_s ks上升一层,并分裂(split) 以所得的两个节点作为左、右孩子

5.3 再分裂
-
若上溢节点的父亲本已饱和,则在接纳被提升的关键码之后,也将上溢,此时,大可套用前法,继续分裂
-
上溢可能持续发生,并逐层向上传播,纵然最坏情况,亦不过到根
-
可令被提升的关键码自成节点,作为新的树根,这是B-树增高的唯一可能
-
注意:新生的树根仅有两个分支
-
总体执行时间正比于 分裂次数,O(h)
5.4 上溢修复
template<typename T> void BTree<T>::solveOverflow( BTNodePosi<T> v ) {
while ( _m <= v->key.size() ) { //除非当前节点不再上溢
Rank s = _m / 2; //轴点(此时_m = key.size() = child.size() - 1)
BTNodePosi u = new BTNode(); //注意:新节点已有一个空孩子
for ( Rank j = 0; j < _m - s - 1; j++ ) { //分裂出右侧节点u(效率低可改进)
u->child.insert( j, v->child.remove( s + 1 ) ); //v右侧_m–s-1个孩子
u->key.insert( j, v->key.remove( s + 1 ) ); //v右侧_m–s-1个关键码
}
u->child[ _m - s - 1 ] = v->child.remove( s + 1 ); //移动v最靠右的孩子
if ( u->child[ 0 ] ) //若u的孩子们非空,则统一令其以u为父节点
for ( Rank j = 0; j < _m - s; j++ ) u->child[ j ]->parent = u;
BTNodePosi<T> p = v->parent; //v当前的父节点p
if ( ! p ) //若p为空,则创建之(全树长高一层,新根节点恰好两度)
{ _root = p = new BTNode(); p->child[0] = v; v->parent = p; }
Rank r = 1 + p->key.search( v->key[0] ); //p中指向u的指针的秩
p->key.insert( r, v->key.remove( s ) ); //轴点关键码上升
p->child.insert( r + 1, u ); u->parent = p; //新节点u与父节点p互联 v = p; //上升一层,如有必要则继续分裂——至多O(logn)层
}
}
6.删除
6.1 算法
template<typename T>
bool BTree<T>::remove( const T & e ) {
BTNodePosi<T> v = search( e ); if ( ! v ) return false; //确认e存在
Rank r = v->key.search(e);
if ( v->child[0] ) {//若v非叶子,则
BTNodePosi<T> u = v->child[r + 1]; //在右子树中
while ( u->child[0] ) u = u->child[0]; //一直向左,即可找到e的后继(必在底层)
v->key[r] = u->key[0]; v = u; r = 0; //交换
}
//assert: 至此,v必位于最底层,且其中第r个关键码就是待删除者
v->key.remove( r ); v->child.remove( r + 1 ); _size--;
solveUnderflow( v ); return true; //如有必要,需做旋转或合并
}
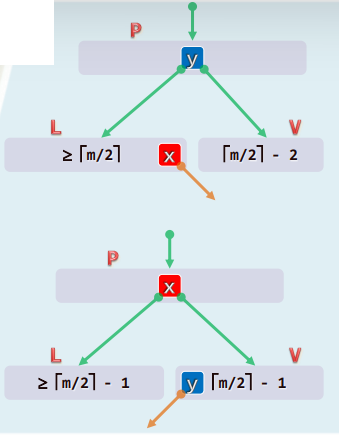
6.2 旋转
-
非根节点 V 下溢时,必恰有 ⌈ m / 2 ⌉ − 2 \lceil m/2 \rceil-2 ⌈m/2⌉−2个关键码和 ⌈ m / 2 ⌉ − 1 \lceil m/2 \rceil-1 ⌈m/2⌉−1个分支
-
视其左、右兄弟 L 、 R 的规模,可分三种情况加以处理
-
(1)若 L 存在,且至少包含 ⌈ m / 2 ⌉ \lceil m/2 \rceil ⌈m/2⌉个关键码
- 将 P 中的分界关键码 y 移至 V 中(作为最小关键码)
- 将 L 中的最大关键码 x 移至 P 中(取代原关键码 y )
-
如此旋转之后,局部乃至全树都重新满足B-树条件下溢修复完毕
-
(2)若 R 存在,且至少包含 ⌈ m / 2 ⌉ \lceil m/2 \rceil ⌈m/2⌉个关键码
- 也可旋转,完全对称
6.3 合并
-
(3) L 和 R 或不存在,或均不足 ⌈ m / 2 ⌉ \lceil m/2 \rceil ⌈m/2⌉个关键码——即便如此
- L 和 R 仍必有其一(不妨以 L 为例),且恰含 ⌈ m / 2 ⌉ − 1 \lceil m/2 \rceil-1 ⌈m/2⌉−1个关键码
-
从 P 中抽出介于 L 和 V 之间的分界关键码 y
- 通过 y 做粘接,将 L 和 V 合成一个节点
- 同时合并此前 y 的孩子引用
-
下溢可能持续发生并向上传播;但至多不过 O(h) 层

6.4 实例
- 底层节点
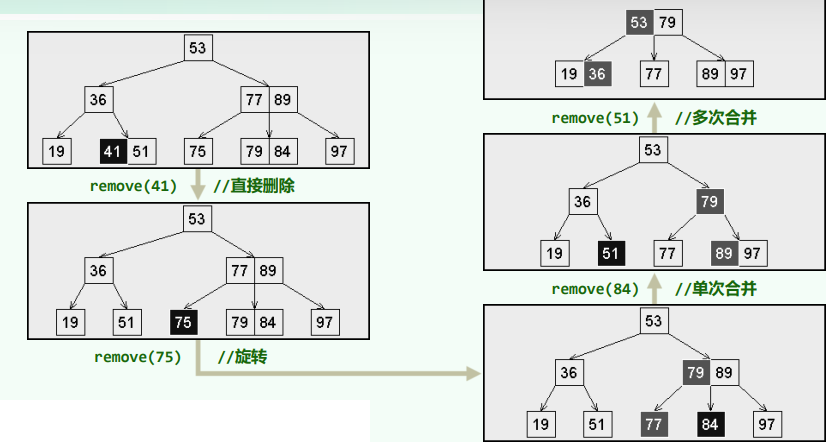
- 非底层节点
6.5 下溢修复
template <typename T> void BTree<T>::solveUnderflow( BTNodePosi<T> v ) {
while ( (_m + 1) / 2 > v->child.size() ) {//除非当前节点没有下溢
BTNodePosi<T> p = v->parent; if ( !p ) { /* 已到根节点 */ }
Rank r = 0; while ( p->child[r] != v ) r++; //确定v是p的第r个孩子
if ( 0 < r ) { //若v不是p的第一个孩子,则
BTNodePosi ls = p->child[r - 1]; //左兄弟必存在
if ( (_m + 1) / 2 < ls->child.size() ) { //若该兄弟足够“胖”,则
v->key.insert( 0, p->key[r-1] ); //p借出一个关键码给v(作为最小关键码)
p->key[r - 1] = ls->key.remove( ls->key.size() – 1 ); //ls的最大key转入p
v->child.insert( 0, ls->child.remove( ls->child.size() – 1 ) );
//同时ls的最右侧孩子过继给v(作为v的最左侧孩子)
if ( v->child[0] ) v->child[0]->parent = v; return; //至此,通过右旋已完成当前层(以及所有层)的下溢处理
}
}
if ( p−>child.size() − 1 > r ) {/∗若v的右兄弟存在,与上一情况完全对称∗/}
if ( 0 < r ) { /∗ 与左兄弟合并 ∗/
BTNodePosi ls = p->child[r-1]; //左兄弟必存在
ls->key.insert( ls->key.size(), p->key.remove(r - 1) );
p->child.remove( r ); //p的第r - 1个关键码转入ls,v不再是p的第r个孩子
ls->child.insert( ls->child.size(), v->child.remove( 0 ) );
if ( ls->child[ ls->child.size() – 1 ] ) //v的最左侧孩子过继给ls做最右侧孩子
ls->child[ ls->child.size() – 1 ]->parent = ls;
while ( !v->key.empty() ) { //v剩余的关键码和孩子,依次转入ls
ls->key.insert( ls->key.size(), v->key.remove(0) );
ls->child.insert( ls->child.size(), v->child.remove(0) );
if ( ls->child[ ls->child.size() – 1 ] )
ls->child[ ls->child.size() – 1 ]->parent = ls;
}
release(v); //释放v
} else { /∗与右兄弟合并,完全对称∗/}
v = p; //上升一层,如有必要则继续旋转或合并——至多O(logn)层
}
}
三、红黑树
1.动机
1.1 并发性(Concurrent Access To A Database)
-
修改之前先加锁(lock);完成后解锁(unlock),访问延迟主要取决于“lock/unlock”周期
-
对于BST而言,每次修改过程中,唯结构有变(reconstruction)处才需加锁,访问延迟主要取决于这类局部之数量
-
Splay(伸展树):结构变化剧烈,最差可达O(n)
-
AVL:remove()时 O ( log n ) O(\log n) O(logn) ——尽管 insert()时可保证O(1)
-
Red-Black:无论insert/remove,均不超过O(1)

1.2 持久性(Persistent structures):支持对历史版本的访问

- 蛮力实现:每个版本独立保存;各版本自成一个搜索结构
- 单次操作 O ( log h + log n ) O(\log h +\log n) O(logh+logn),累计O(n·h)时间/空间
1.3 压缩存储:大量共享,少量更新:每个版本的新增复杂度,仅为 O ( log n ) O(\log n) O(logn)

- 部分持久性(Partial Persistence):仅支持对历史版本的读取
- 这类情况下,还可进一步提高至总体O(n+h)、单版本O(1)
1.4 O(1)重构
- 为此,就树形结构的拓扑而言,相邻版本之间的差异不能超过O(1)
2.结构
2.1 红与黑
- 由红、黑两类节点组成的BST统一增设外部节点NULL,使之成为真二叉树
2.2 规则
-
树根:必为黑色
-
外部节点:均为黑色
-
红节点:只能有黑孩子(及黑父亲)
-
外部节点:黑深度(黑的真祖先数目)相等
- 亦即根(全树)的黑高度
- 子树的黑高度,即后代NULL的相对黑深度
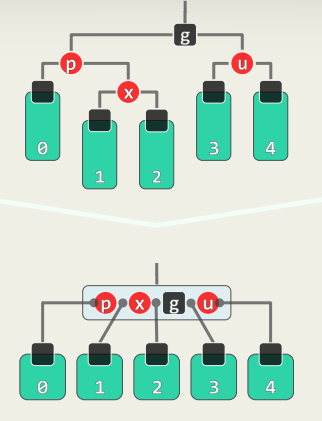
2.3 红黑树 = (2,4)-树
- 将红节点提升至与其(黑)父亲等高——于是每棵红黑树,都对应于一棵(2,4)-树
- 将黑节点与其红孩子视作关键码,再合并为B-树的超级节点
- 无非四种组合,分别对应于4阶B-树的一类内部节点

2.4 红黑树∈BBST
- 包含n个内部节点的红黑树T,高度
h
=
O
(
log
n
)
h=O(\log n)
h=O(logn)(既然B-树是平衡的,由等价性红黑树也应是)
- log 2 ( n + 1 ) ≤ h ≤ 2 ⋅ log 2 ( n + 1 ) \log_2 (n+1)≤h≤2 · \log_2 (n+1) log2(n+1)≤h≤2⋅log2(n+1)
- 若T高度为h,红/黑高度为R/H,则 H ≤ h ≤ R + H ≤ 2 ⋅ H H≤h≤R+H≤2·H H≤h≤R+H≤2⋅H
- 若T所对应的B-树为 T B T_B TB,则H即是 T B T_B TB的高度
- $T_B的每个节点,都恰好包含T的一个黑节点
- 于是, H ≤ log ⌈ 4 / 2 ⌉ ( n + 1 ) / 2 + 1 = log 2 ( n + 1 ) H≤\log_{\lceil 4/2 \rceil} (n+1)/2 +1=\log_2(n+1) H≤log⌈4/2⌉(n+1)/2+1=log2(n+1)

2.5 RedBlack
template<typename T> class RedBlack : public BST<T> { //红黑树
public: //BST::search()等其余接口可直接沿用
BinNodePosi insert( const T & e ); //插入(重写)
bool remove( const T & e ); //删除(重写)
protected:
void solveDoubleRed( BinNodePosi x ); //双红修正
void solveDoubleBlack( BinNodePosi x ); //双黑修正
int updateHeight( BinNodePosi x ); //更新节点x的高度(重写)
};
template<typename T> int RedBlack<T>::updateHeight( BinNodePosi<T> x ) {
return x->height = IsBlack( x ) + max( stature( x->lc ), stature( x->rc ) );
}
3.插入
3.1 算法
- 按BST规则插入关键码e //x = insert(e)必为叶节点
- 除非系首个节点(根),x的父亲p = x->parent必存在,首先将x染红 //x->color = isRoot(x) ? B : R
- 至此,条件1、2、4依然满足; 但3不见得,有可能双红(double-red)
3.2 实现
template BinNodePosi RedBlack::insert( const T & e ) {
// 确认目标节点不存在(留意对_hot的设置)
BinNodePosi & x = search( e ); if ( x ) return x;
// 创建红节点x,以_hot为父,黑高度 = 0
x = new BinNode( e, _hot, NULL, NULL, 0 ); _size++;
// 如有必要,需做双红修正,再返回插入的节点
BinNodePosi xOld = x; solveDoubleRed( x ); return xOld;
} //无论原树中是否存有e,返回时总有x->data == e
3.3 u为黑色时

- 此时,x、p、g的四个孩子 (可能是外部节点)全为黑,且黑高度相同

- 局部“3+4”重构,b转黑,a或c转红
- 在某三叉节点中插入红关键码后,原黑关键码不再居中(RRB或BRR)
- 调整的效果,无非是将三个关键码的颜色改为RBR
3.4 u为红色时
- 在B-树中,等效于超级节点发生上溢

- p与u转黑,g转红,在B-树中,等效于节点分裂,关键码g上升一层

-
既然是分裂,也应有可能继续向上传递——亦即,g与parent(g)再次构成双红
-
果真如此,可等效地将g视作新插入的节点,区分以上两种情况,如法处置
-
直到所有条件满足(即不再双红),或者抵达树根
-
g若果真到达树根,则强行将其转为黑色(整树黑高度加一)
3.5 双红修正
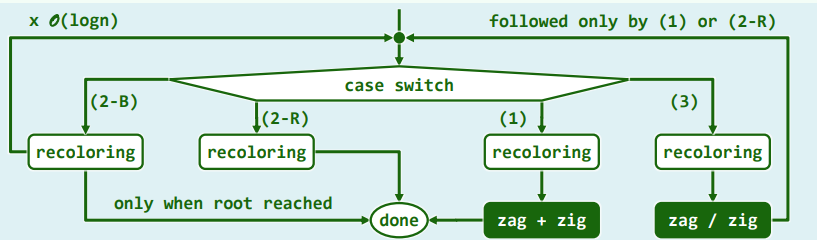
template<typename T> void RedBlack<T>::solveDoubleRed( BinNodePosi x ) {
if ( IsRoot( *x ) ) { //若已(递归)转至树根,则将其转黑,整树黑高度也随之递增
_root->color = RB_BLACK; _root->height++; return;
} //否则...
BinNodePosi<T> p = x->parent; //考查x的父亲p(必存在)
if ( IsBlack( p ) ) return; //若p为黑,则可终止调整;否则
BinNodePosi<T> g = p->parent; //x祖父g必存在,且必黑
BinNodePosi<T> u = uncle( x ); //以下视叔父u的颜色分别处理
if ( IsBlack( u ) ) { //u为黑或NULL
// 若x与p同侧,则p由红转黑,x保持红;否则,x由红转黑,p保持红
if ( IsLChild( *x ) == IsLChild( *p ) ) p->color = RB_BLACK;
else x->color = RB_BLACK;
g->color = RB_RED; //g必定由黑转红
BinNodePosi<T> gg = g->parent; //great-grand parent
BinNodePosi<T> r = FromParentTo( *g ) = rotateAt( x );
r->parent = gg; //调整之后的新子树,需与原曾祖父联接
}
else {/u为红色
p->color = RB_BLACK; p->height++; //p由红转黑,增高
u->color = RB_BLACK; u->height++; //u由红转黑,增高
g->color = RB_RED; //在B-树中g相当于上交给父节点的关键码,故暂标记为红
solveDoubleRed( g ); //继续调整:若已至树根,接下来的递归会将g转黑(尾递归)
}
}
3.6 复杂度
- 重构、染色均只需常数时间,故只需统计其总次数
- RedBlack::insert()仅需 O ( log n ) O(\log n) O(logn)时间
- 其间至多做 O ( log n ) O(\log n) O(logn)次重染色、O(1)次旋转
| 旋转 | 染色 | 此后 | |
|---|---|---|---|
| u为黑 | 1~2 | 2 | 调整随即完成 |
| u为红 | 0 | 3 | 可能再次双红 但必上升两层 |
4.删除
4.1 等效删除
-
首先按照BST常规算法,执行r = removeAt( x, _hot ) (实际被摘除的可能是x的前驱或后继w,简捷起见,以下不妨统称作x)
-
x由孩子r接替,此时另一孩子k必为NULL
-
但在随后的调整过程中,x可能逐层上升
-
故需假想地、统一地、等效地理解为:
- k为一棵黑高度与r相等的子树,且随x一并摘除(尽管实际上从未存在过)

4.2 其一为红
- 完成removeAt()之后
- 条件1、2依然满足
- 但条件3、4却不见得
- 在原树中,考查x与r
- 若x为红,则条件3、4自然满足
- 若r为红,则令其与x交换颜色
- 总之,无论x或r为红,则3、4均不难满足 ——删除遂告完成
4.3 双黑

- 摘除x并代之以r后,全树黑深度不再统一(等效于B-树中x所属节点下溢)
4.4 实现
template<typename T> bool RedBlack<T>::remove( const T & e ) {
BinNodePosi<T> & x = search( e ); if ( !x ) return false; //查找定位
BinNodePosi<T> r = removeAt( x, _hot ); //删除_hot的某孩子,r指向其接替者
if ( ! ( -- _size ) ) return true; //若删除后为空树,可直接返回
if ( ! _hot ) { //若被删除的是根,则
_root->color = RB_BLACK; //将其置黑,并
updateHeight( _root ); //更新(全树)黑高度
return true;
} //至此,原x(现r)必非根
// 若父亲(及祖先)依然平衡,则无需调整
if ( BlackHeightUpdated( * _hot ) ) return true;
// 至此,必失衡
// 若替代节点r为红,则只需简单地翻转其颜色
if ( IsRed( r ) ) { r->color = RB_BLACK; r->height++; return true; }
// 至此,r以及被其替代的x均为黑色
solveDoubleBlack( r ); //双黑调整(入口处必有 r == NULL)
return true;
}
4.5 s为黑,且至少有一个红孩子t
-
“3+4”重构:
- t ~ a
- s ~ b
- p ~ c
-
r保持黑,a、c染黑,b继承p的原色
-
如此,红黑树性质在全局得以恢复——删除完成

- 通过关键码的旋转,消除超级节点的下溢
- 在对应的B-树中
- p若为红,问号之一为黑关键码
- p若为黑,必自成一个超级节点
4.6 s为黑,且两个孩子均为黑
- p为红
-
r保持黑;s转红;p转黑
-
在对应的B-树中,等效于下溢节点与兄弟合并
-
红黑树性质在全局得以恢复
-
失去关键码p后,上层节点不会继而下溢
-
合并之前,在p之左或右侧 还应有一个黑关键码
-


- p为黑
-
s转红;r与p保持黑
-
红黑树性质在局部得以恢复
-
在对应的B-树中,等效于下溢节点与兄弟合并
-
合并前,p和s均属于单关键码节点 (孩子的下溢修复后,父节点继而下溢)
-
好在可继续分情况处理高度递增,至多 O ( log n ) O(\log n) O(logn)层(步)
-

4.7 s为红(其孩子均为黑)

-
绕p单旋;s红转黑,p黑转红
-
黑高度依然异常
-
但r有了一个新的黑兄弟s’ 故转化为前述情况
-
既然p已转红,接下来绝不会是BB-2B,而只能是BB-2R或BB-1
-
于是,再经一轮调整,红黑树性质必然全局恢复
4.8 双黑修正
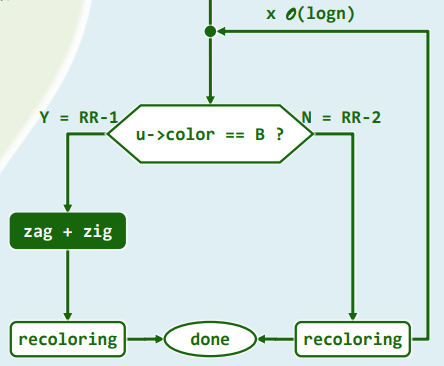
template<typename T> void RedBlack<T>::solveDoubleBlack( BinNodePosi r ) {
BinNodePosi<T> p = r ? r->parent : _hot; if ( !p ) return; //r的父亲
BinNodePosi<T> s = (r == p->lc) ? p->rc : p->lc; //r的兄弟
if ( IsBlack( s ) ) { //兄弟s为黑
BinNodePosi t = NULL; //s的红孩子(若左、右孩子皆红,左者优先;皆黑时为NULL)
if ( IsRed ( s->rc ) ) t = s->rc;
if ( IsRed ( s->lc ) ) t = s->lc;
if ( t ) { /* ... 黑s有红孩子*/
RBColor oldColor = p->color; //备份p颜色,并对t、父亲、祖父
BinNodePosi<T> b = FromParentTo( *p ) = rotateAt( t ); //旋转
if (HasLChild( *b )) { b->lc->color = RB_BLACK; updateHeight( b->lc ); }
if (HasRChild( *b )) { b->rc->color = RB_BLACK; updateHeight( b->rc ); }
b->color = oldColor; updateHeight( b ); //新根继承原根的颜色
}
else { /* ... 黑s无红孩子*/
s->color = RB_RED; s->height--; //s转红
if ( IsRed( p ) ) //p转黑,但黑高度不变
{ p->color = RB_BLACK; }
else //p保持黑,但黑高度下降;递归修正
{ p->height--; solveDoubleBlack( p ); }
}
} else { /* ... 兄弟s为红*/
s->color = RB_BLACK; p->color = RB_RED; //s转黑,p转红
BinNodePosi<T> t = IsLChild( *s ) ? s->lc : s->rc; //取t与其父s同侧
_hot = p; FromParentTo( *p ) = rotateAt( t ); //对t及其父亲、祖父做平衡调整
solveDoubleBlack( r ); //继续修正r——此时p已转红,故后续只能是第一种或第二种
}
}
4.9 复杂度
- RedBlack::remove() 仅需
O
(
log
n
)
O(\log n)
O(logn)时间
- O ( log n ) O(\log n) O(logn)次重染色
- O ( 1 ) O(1) O(1)次旋转
| 旋转 | 染色 | 此后 | |
|---|---|---|---|
| 黑s有红子t | 1~2 | 3 | 调整随即完成 |
| 黑s无红子,p红 | 0 | 2 | 调整随即完成 |
| 黑s无红子,p黑 | 0 | 1 | 必再次双黑,但将上升一层 |
| 红s | 1 | 2 | 转为(1)或(2R) |















 361
361











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









