





连续截取PC上特定窗口的图像并通过网络发送到另一台显示器,该显示器接收并显示。

转发: RP2040-ETH-DVI-ZERO: AnyView ( HDMI Mode )
项目介绍

我基于RP2040-ETH-DVI-ZERO开发了一个新的应用程序AnyView,这个应用程序可以通过网络将PC屏幕图像传输到另一台显示器上并显示。
这个应用程序包含两部分:
第一部分是运行在PC上的Python程序,它创建一个半透明窗口,用鼠标长按窗口可以改变窗口的位置,启动后不断对窗口进行截图,并通过网络将截图发送到RP2040-ETH-DVI-ZERO;
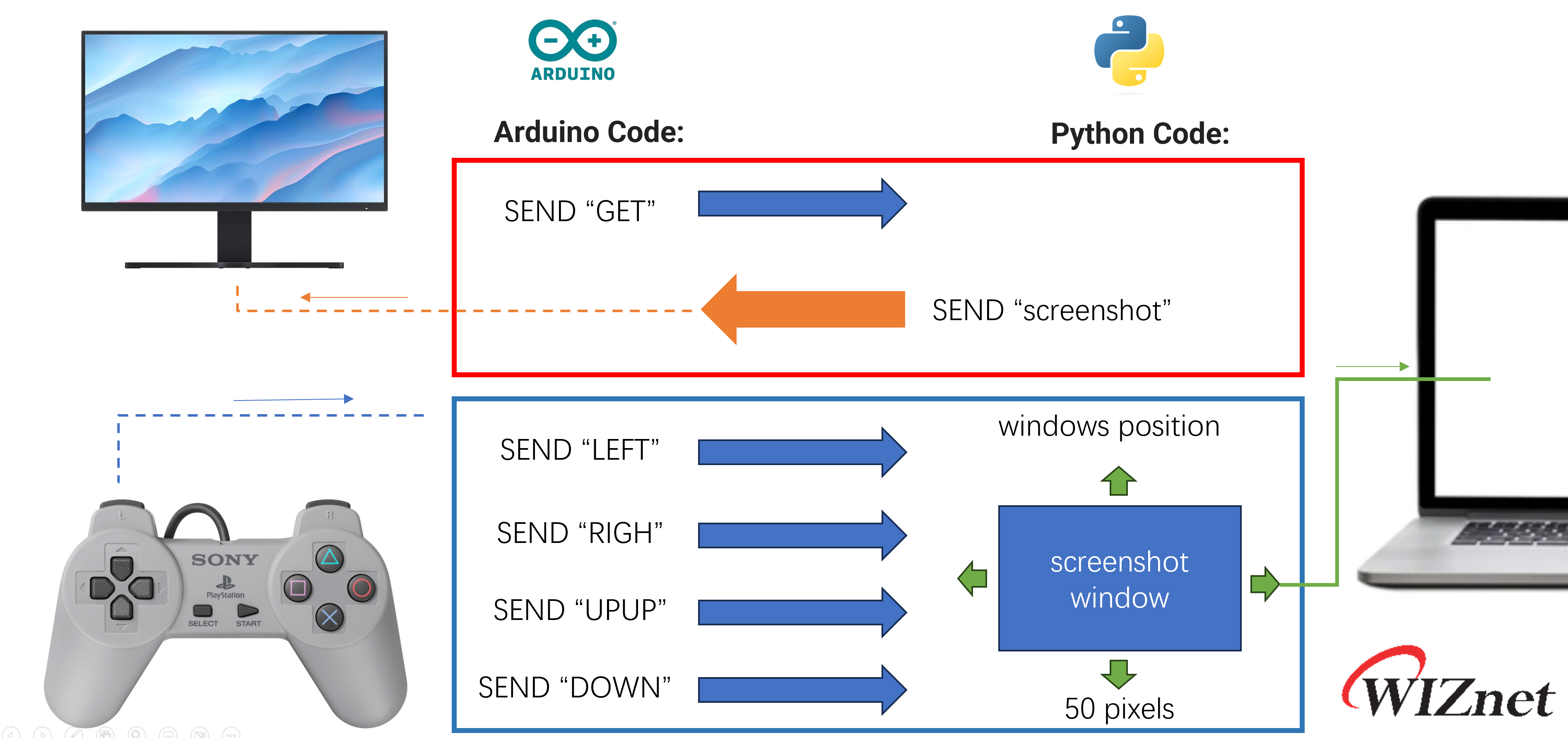
第二部分是RP2040-ETH-DVI-ZERO的代码,它收到截图后,通过HDMI接口将截图显示在显示器上;并将游戏控制器连接到USB OTG接口,以控制截图窗口在PC上的位置。
工作流程:
Demo Video:
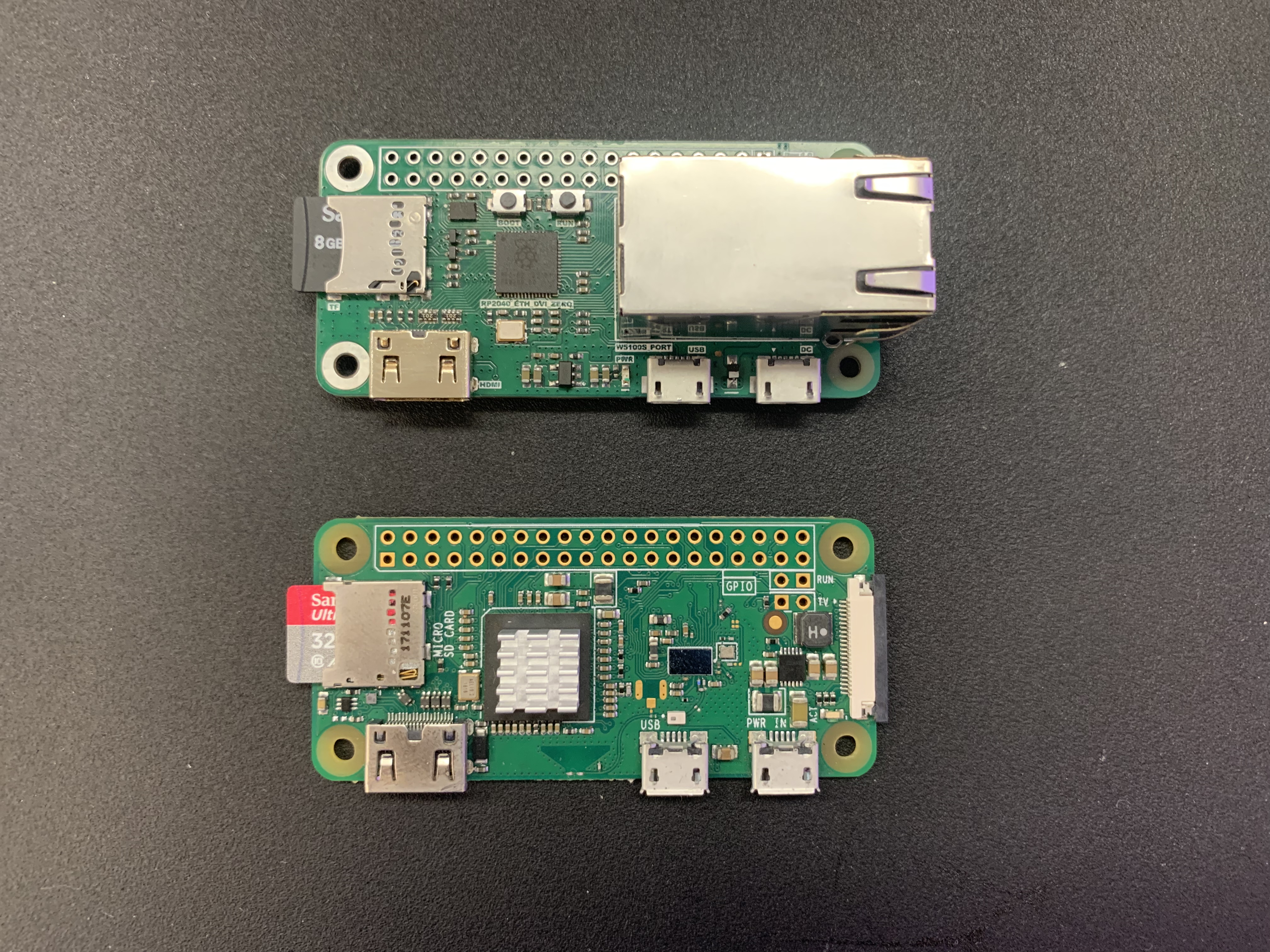
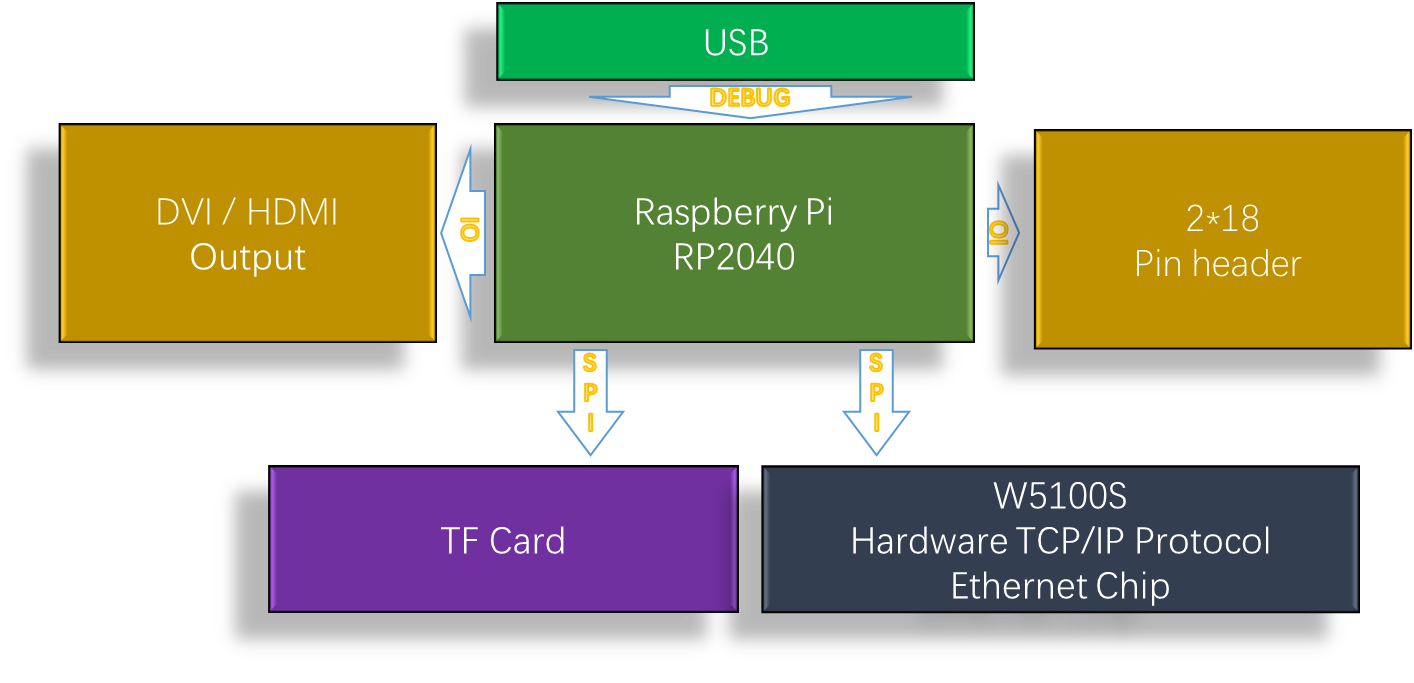
本项目基于RP2040-ETH-DVI-ZERO进行开发,RP2040-ETH-DVI-ZERO是一块采用Raspberry Pi RP2040作为MCU的开发板,带有DVI接口、TF插槽和W5100S-PORT。
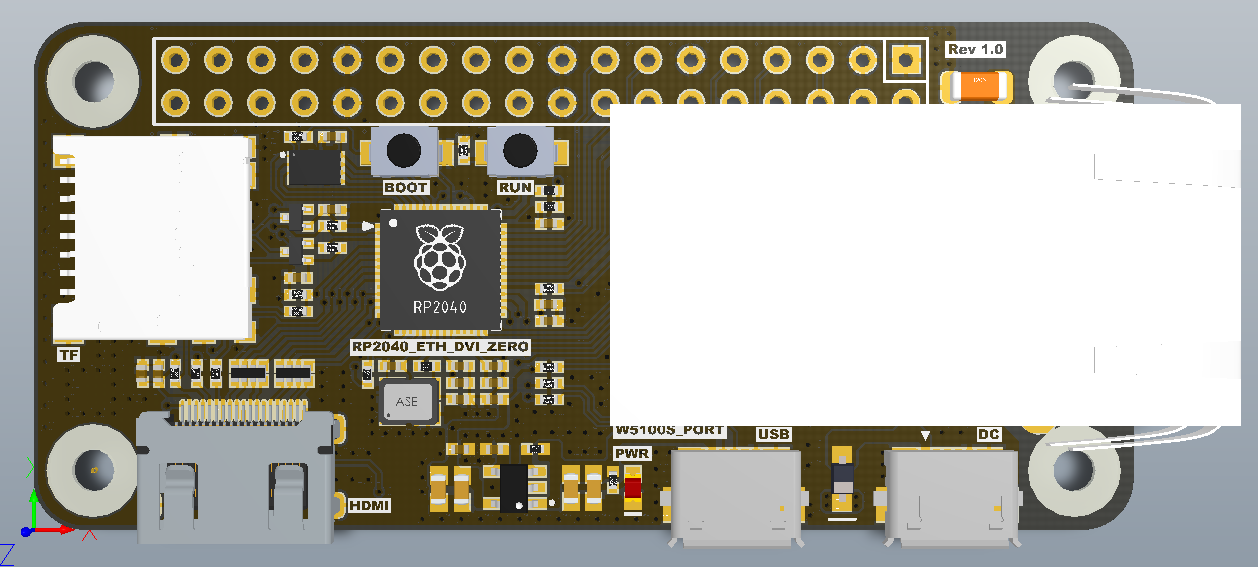
RP2040-ETH-DVI-ZERO 至 Rev1.0 顶视图:
RP2040-ETH-DVI-ZERO 至 Rev1.0 返回查看:
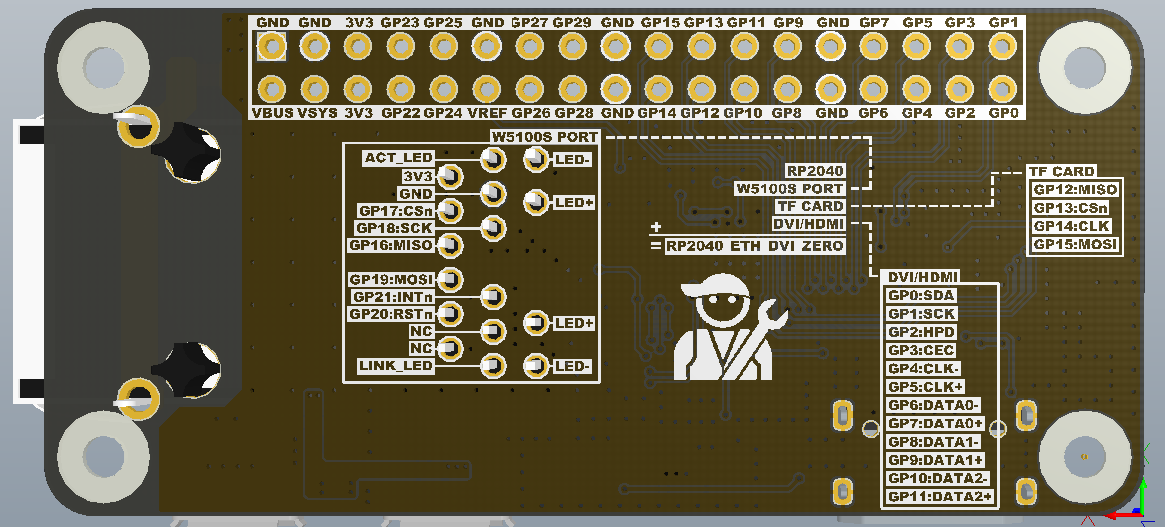
PCB背面的丝印上显示了所有接口使用的GPIO,开发时不用看原理图就能确定GPIO编号。
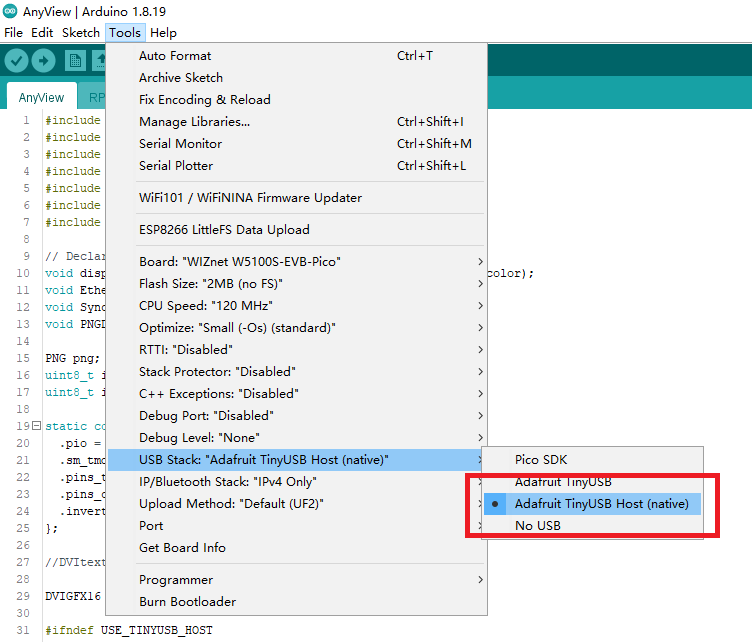
最初尝试使用树莓派RP2040的PIO实现USB OTG功能,可惜PIO模式OTG功能和DVI接口不能同时共存,最后只能通过RP2040原有的USB Host(native)接口来实现USB OTG。感谢HisashiKato,在他的开源项目中找到了实现USB OTG和DVI共存的灵感。
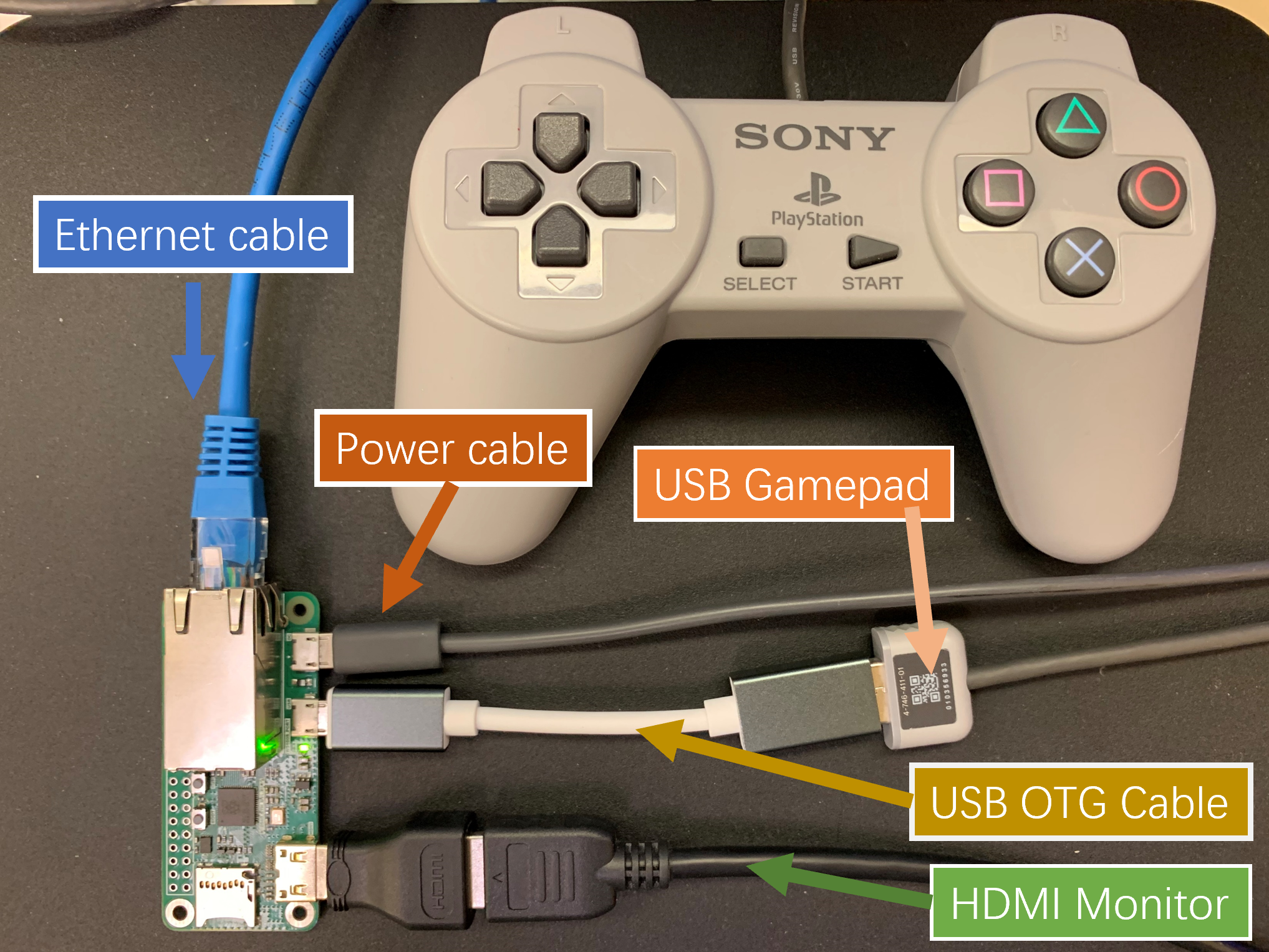
USB OTG 可以通过上述连接线将 USB 设备连接到 RP2040-ETH-DVI-ZERO 的 Micro USB 口。

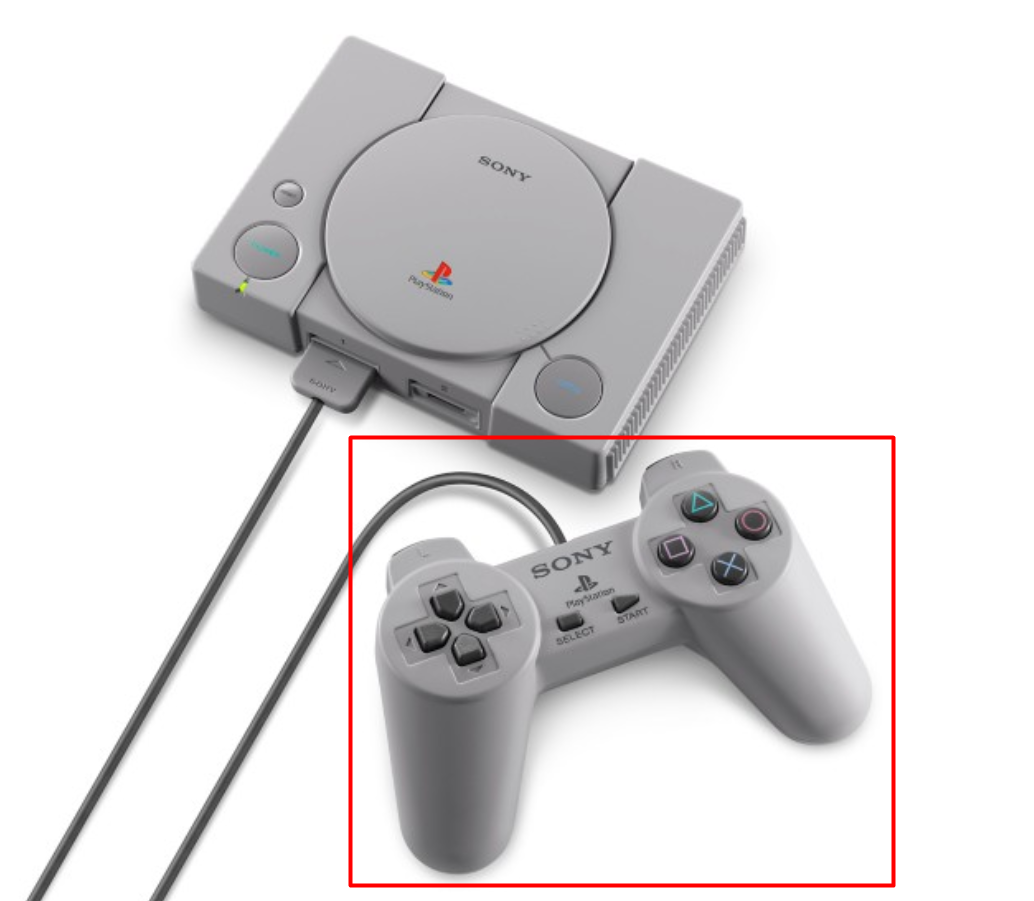
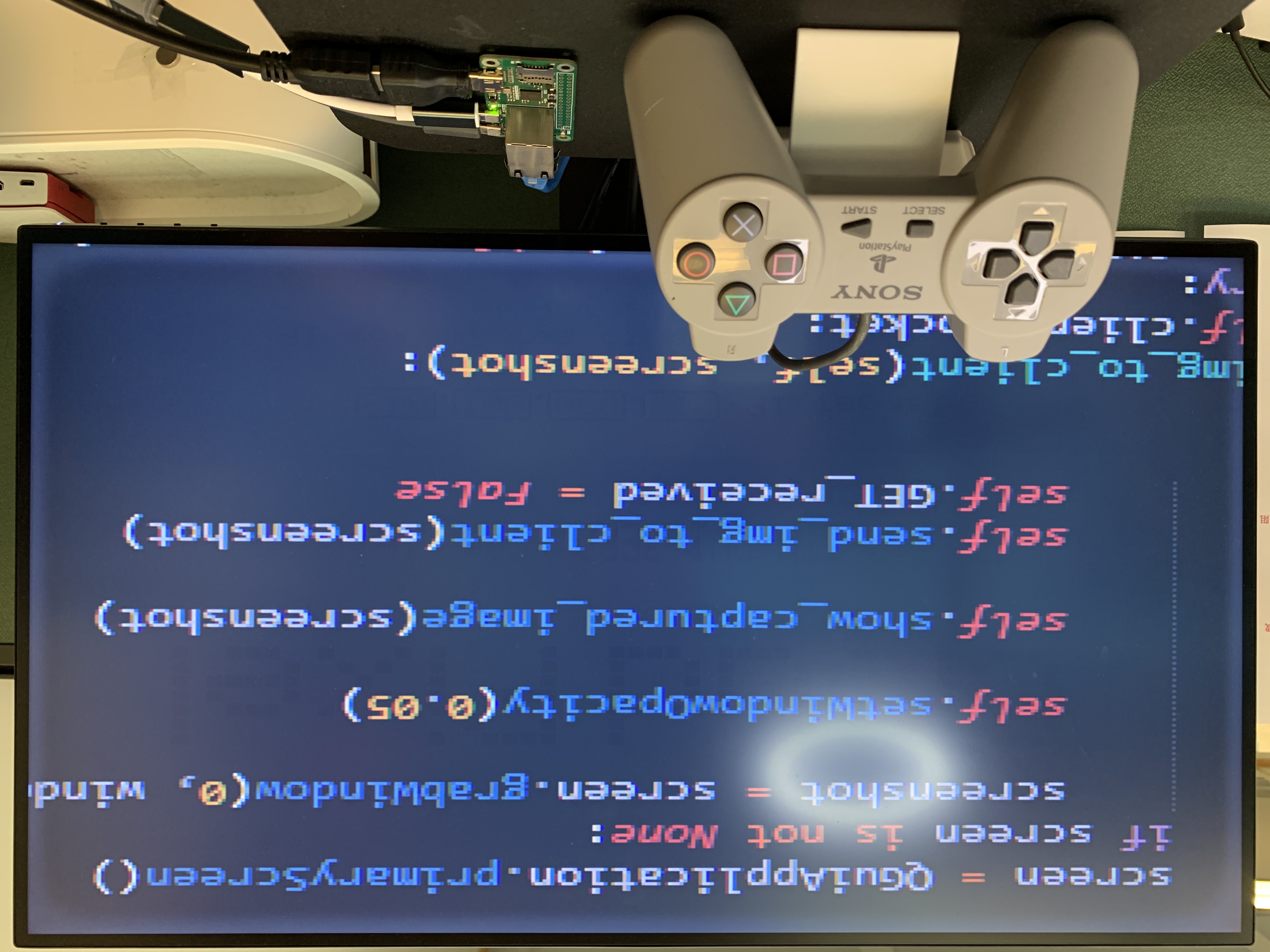
我用的是SONY 2018年推出的PS Classic(PS Mini)上的USB接口游戏控制器,此游戏控制器作为USB HID输入设备,通过方向键来控制和改变PC端的截图窗口的位置。
电缆连接:
Arduino代码:
//Supports the DVI output by RP2040
#include <PicoDVI.h>
//Support USB Host interface
#include <Adafruit_TinyUSB.h>
//Support W5100S-PORT
#include <Ethernet.h>
//Arduino graphics library
#include <Arduino_GFX_Library.h>
//Storage running parameters
#include <EEPROM.h>
// PNG Decoder library
#include <PNGdec.h> #include <PicoDVI.h> 该库创造性地利用了树莓派独有的PIO,实现了DVI输出,可以生成320*240分辨率的图像,并扩展为640*480(60Hz)输出到显示器
这是DVI接口的定义部分。
static const struct dvi_serialiser_cfg rp2040_dvi_zero_cfg = {
.pio = DVI_DEFAULT_PIO_INST,
.sm_tmds = {0, 1, 2},
.pins_tmds = {6, 8, 10},
.pins_clk = 4,
.invert_diffpairs = true
};
DVIGFX16 display(DVI_RES_320x240p60, rp2040_dvi_zero_cfg);
RP2040-ETH-DVI-ZERO相对于其他的RP2040 DVI开发板来说,其独特之处在于增加了一个以太网模块W5100S-PORT,这是我在W5100S基础上开发的以太网模块,在非常小的Size内实现了以太网的所有电路。

我对 W5100S 部分使用与 W5100S_EVB_PICO 相同的引脚设计,因此我可以使用 W5100S_EVB_PICO 的所有参考代码。
void setup() {
if (!display.begin()) {
pinMode(LED_BUILTIN, OUTPUT);
for (;;) digitalWrite(LED_BUILTIN, (millis() / 500) & 1);
}
USBHost.begin(0);
// USB Host is executed by timer interrupt.
add_repeating_timer_us( KBD_INT_TIME/*us*/, timer_callback, NULL, &rtimer );
display_Cloud_Pixel_Icon(170,80,BLACK);
Ethernet_check();
EEPROM.begin(8);
Sync_With_eeprom(0);
}在Ethernet_check函数中我处理了网线没插好的异常情况。
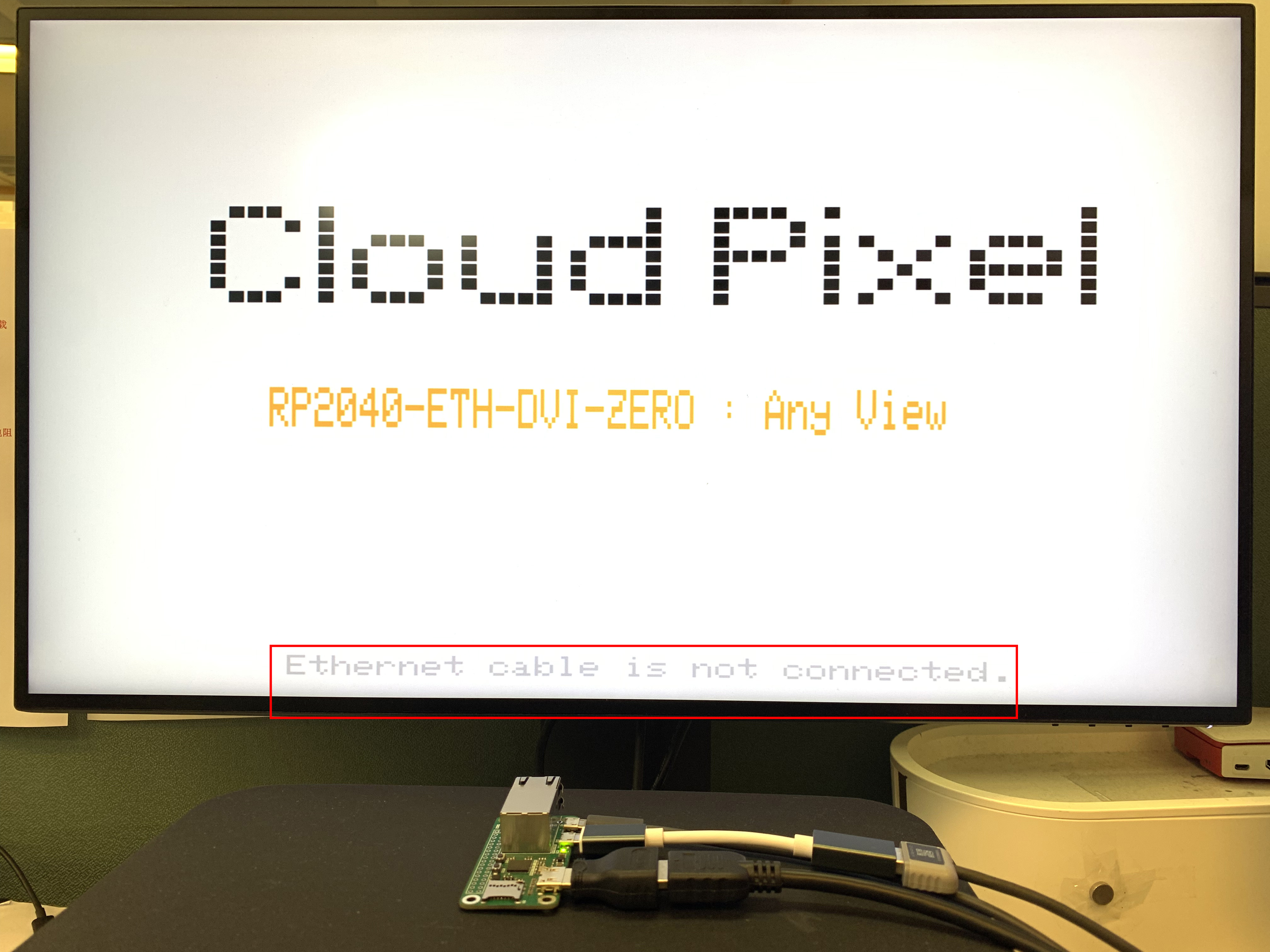
void Ethernet_check(void)
{
Ethernet.init(17);
while (Ethernet.linkStatus() == LinkOFF) {
display.setCursor(70, 225);
display.setTextSize(1);
display.setTextColor(LIGHTGREY);
display.print("Ethernet cable is not connected.");
delay(500);
display.setCursor(70, 225);
display.setTextSize(1);
display.setTextColor(WHITE);
display.print("Ethernet cable is not connected.");
delay(200);
}
Ethernet.begin(mac);
display.setTextColor(LIGHTGREY);
display.setTextSize(1);
display.setCursor(120, 225);
display.print("IP:");
display.print(Ethernet.localIP());
display.print(Ethernet.localIP()[4]);
}获取IP地址后,显示在屏幕底部。

在这个显示画面中,可以用游戏控制器控制“目标IP”的输入,左右方向键选择需要更改IP地址的位置,上下方向键改变IP值的大小。设置完成后,按游戏控制器的“圆圈”键即可启动Any view的应用。
case show_first_screen:
{
display_Cloud_Pixel_Icon(170,80,BLACK);
display.setTextColor(LIGHTGREY);
display.setTextSize(1);
display.setCursor(65, 205);
display.print("Use the Gamepad to set Target IP");
display.setCursor(83, 215);
display.print("Press to Start Any view");
display.fillCircle(122,218,5,DARKGREY);
display.drawCircle(122,218,4,0xf920);
display.setCursor(120, 225);
display.print("IP:");
display.print(Ethernet.localIP());
display.setTextColor(DARKGREY);
display.setTextSize(1);
display.setCursor(80, 182);
display.print("Target IP:");
for(uint8_t n = 0; n <4; n++)
{
display.drawRoundRect(140+n*25,180,21,11,2,DARKGREY);
display.setTextColor(LIGHTGREY);
display.setTextSize(1);
display.setCursor(140+n*25+2, 182);
display.printf("%03d",Dest_ip[n]);
display.setTextColor(DARKGREY);
if(n<3)
{
display.setCursor(140+n*25+20, 182);
display.print(".");
}
}
currentState = show_set_screen;
}
break;在状态机的show_set_screen中设置Target IP:
case show_set_screen:
{
display.setTextColor(GREEN);
display.setTextSize(1);
display.setCursor(140+Dest_ip_num*25+2, 182);
display.printf("%03d",Dest_ip[Dest_ip_num]);
if(key_Right)
{
key_Right = 0;
display.setTextColor(LIGHTGREY);
display.setTextSize(1);
display.setCursor(140+Dest_ip_num*25+2, 182);
display.printf("%03d",Dest_ip[Dest_ip_num]);
if(Dest_ip_num <3)
{
Dest_ip_num ++;
}else{
Dest_ip_num = 0;
}
delay(300);
key_Right = 0;
}
if(key_Left)
{
display.setTextColor(LIGHTGREY);
display.setTextSize(1);
display.setCursor(140+Dest_ip_num*25+2, 182);
display.printf("%03d",Dest_ip[Dest_ip_num]);
if(Dest_ip_num >0)
{
Dest_ip_num --;
}else{
Dest_ip_num = 3;
}
delay(300);
key_Left = 0;
}
if(key_Up)
{
display.setTextColor(WHITE);
display.setTextSize(1);
display.setCursor(140+Dest_ip_num*25+2, 182);
display.printf("%03d",Dest_ip[Dest_ip_num]);
if(Dest_ip[Dest_ip_num]<255)
{
Dest_ip[Dest_ip_num]++;
}
delay(300);
key_Up = 0;
}
if(key_Down)
{
display.setTextColor(WHITE);
display.setTextSize(1);
display.setCursor(140+Dest_ip_num*25+2, 182);
display.printf("%03d",Dest_ip[Dest_ip_num]);
if(Dest_ip[Dest_ip_num]>0)
{
Dest_ip[Dest_ip_num]--;
}
delay(300);
key_Down = 0;
}
if(key_Circle)
{
Sync_With_eeprom(1);
currentState = Connect_Dest_ip;
delay(300);
key_Circle = 0;
}
}
break;此时会通过“Sync_With_eeprom”函数保存到虚拟EEPROM中。当后面的参数为0时,读取eeprom中的值;为1时,写入新的值;为2时,清除所有参数值。
void Sync_With_eeprom(uint8_t i)
{
int addr = 0;
if(i == 0)
{
if(EEPROM.read(0))
{
for(uint8_t n = 0; n<4; n++)
{
Dest_ip[n] = EEPROM.read(n+1);
}
}
}else if(i == 1){
EEPROM.write(addr,1);
for(uint8_t n = 0; n<4; n++)
{
EEPROM.write(n+1, Dest_ip[n]);
}
EEPROM.commit();
}
else if(i == 2)
{
for(int i =0; i< 4; i++){
EEPROM.write(i,0x00);
}
EEPROM.commit();
}
}在设置界面设置好Target IP后,按下游戏手柄上的“圆圈”键,开始以客户端身份连接“Target IP”服务器。随后RP2040会向服务器发送“GETT”消息,获取新的截图。获取步骤是先获取PC响应消息的四个字节长度,然后根据这个长度,我请求接收RP2040 RAM中的缓存,然后紧接着接收截图图像。在Python程序中,我将截图图像压缩成PNG图片,接收完成后,调用PNG图片解码函数进行解码,并显示在屏幕上。
// Function to draw pixels to the display
void PNGDraw(PNGDRAW *pDraw)
{
uint16_t usPixels[320];
uint8_t usMask[320];
png.getLineAsRGB565(pDraw, usPixels, PNG_RGB565_LITTLE_ENDIAN, 0x00000000);
png.getAlphaMask(pDraw, usMask, 1);
display.drawRGBBitmap(image_x, image_y + pDraw->y, usPixels, usMask, pDraw->iWidth,1);
}
你也可以使用USB游戏控制器来控制PC上截图窗口的位置,按左箭头键,窗口会向左移动50像素,按右箭头键,窗口会向右移动50像素,按上箭头键,窗口向上移动50像素,按下箭头键,窗口向下移动50像素,按“十字”键停止截图。
PC端Python:
我正在学习 Python 编程,但目前只能进行简单的修改,还无法独立开发 Python 代码。幸好有了 ChatGPT 的帮助,一切都变得方便多了。
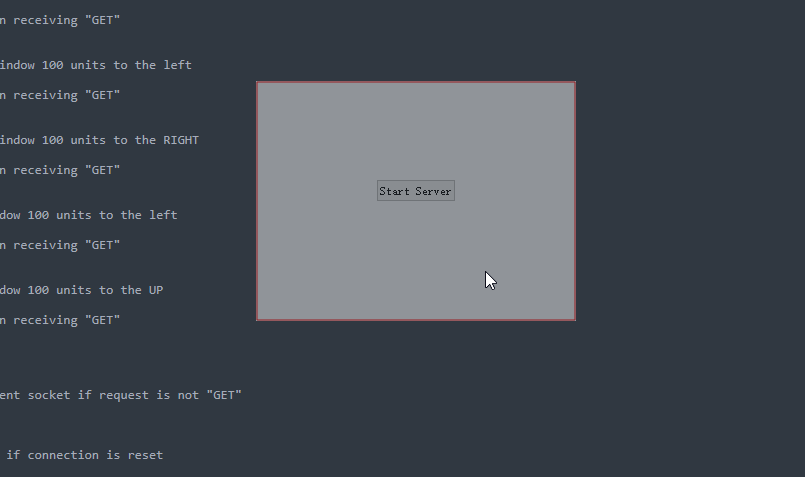
Python代码运行后,屏幕上会显示一个320*240像素的半透明窗口,可以长按鼠标左键移动窗口位置。
当鼠标不在这个窗口上时,为了减少对我们正常使用PC的干扰,我将窗口设置为近乎透明。
当鼠标位于该窗口上时:
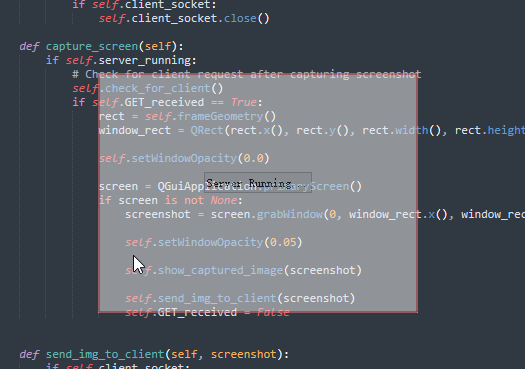
点击窗口中间的“Start Server”,建立TCP服务器监听。等待RP2040-ETH-DVI-ZERO建立通信链路。
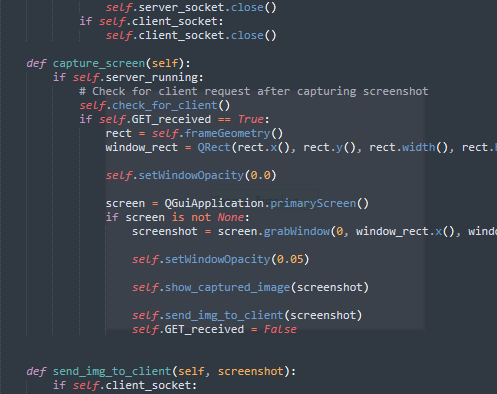
这是Python代码的控制部分,接收W5100S-PORT消息并进行任务处理。
def check_for_client(self):
if self.server_socket:
try:
self.server_socket.settimeout(0.2) # Set a short timeout to keep the main loop responsive
if self.client_socket is None:
self.client_socket, client_address = self.server_socket.accept()
print(f"Connection from {client_address}")
else:
request = self.client_socket.recv(1024).decode()
print(request)
if request.strip() == "GETT":
print("GETT")
self.GET_received = True # Set the flag upon receiving "GET"
elif request.strip() == "LEFT":
print("LEFT")
self.move(self.x() - 50, self.y()) # Move window 100 units to the left
time.sleep(0.1)
self.GET_received = True # Set the flag upon receiving "GET"
elif request.strip() == "RIGH":
print("RIGHT")
self.move(self.x() + 50, self.y()) # Move window 100 units to the RIGHT
time.sleep(0.1)
self.GET_received = True # Set the flag upon receiving "GET"
elif request.strip() == "UPUP":
print("UP")
self.move(self.x(), self.y()-50) # Move window 100 units to the left
time.sleep(0.1)
self.GET_received = True # Set the flag upon receiving "GET"
elif request.strip() == "DOWN":
print("DOWN")
self.move(self.x(), self.y()+50) # Move window 100 units to the UP
time.sleep(0.1)
self.GET_received = True # Set the flag upon receiving "GET"
else:
print(request.strip())
# else:
# self.client_socket.close()
# self.client_socket = None # Reset the client socket if request is not "GET"
except socket.timeout:
pass
except ConnectionResetError:
self.client_socket = None # Reset the client socket if connection is reset
这是截图图像==>PNG压缩==>TCP通信的处理流程。
def send_img_to_client(self, screenshot):
if self.client_socket:
try:
filename = f"capture_{self.capture_count}.png"
screenshot.save(filename, "PNG", 50)
# self.capture_count += 1
with open(filename, 'rb') as image_file:
image_data = image_file.read()
image_size = len(image_data)
size_bytes = image_size.to_bytes(4, 'big')
self.client_socket.sendall(size_bytes) # Send image size
time.sleep(0.1)
self.client_socket.sendall(image_data) # Send image data
print("Image sent to client.")
except socket.timeout:
pass完毕。















 110
110

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









