







3D结构光(Structured Light)和TOF(Time of Flight)简介与对比
看到最近人脸识别有替代指纹识别的趋势,人脸识别若用传统的2D图像来识别人脸,没有太大的价值,谁手里有一张手机主人的照片就能解锁手机以及信用支付了。所以这就需要用到深度信息来构建3D的人脸模型,获取深度信息现在有三种主要的方法:
- 3D结构光(Structured Light)—主动式测距
- TOF(Time of Flight) —主动式测距
- RGB双目 —被动式测距
在这里只想重点说说3D结构光和TOF,RGB双目就是利用两个RGB摄像机的拍摄的图像进行特征点匹配,通过三角测量计算出来的深度。
1.3D结构光(Structured Light)
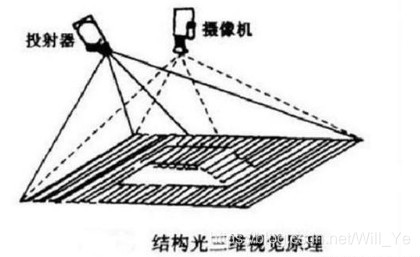
结构光的提出也是为了解决RGB双目的存在的问题(如,RGB双目很依赖图像的特征、受光照、纹理等影响),结构光法不依赖图像中物体的颜色和纹理,采用主动投影已知图案的方法来实现快速鲁棒的匹配特征点。如下图所示,投射器投射的是带有已知编码图案的光源。
现在用的Kinect camera就是用了结构光获取的深度信息。
2.TOF(Time of Flight)
字面意思飞行时间,那么是什么的飞行时间呢?其实就是激光发射器发出的光从发射出去的瞬间到碰到物体反射回到接收器接收的瞬间,这么一段光的飞行时间,因为已知光速和调制光的波长,通过距离计算公式就可以知道物体表面各个点的深度信息。
Summary
信息汇总一下,三种获取深度信息方法的参数对比表格:
| 深度信息获取方式 | 3D结构光 | TOF | RGB双目 |
|---|---|---|---|
| 工作原理 | 投影已知编码图案光源的方法来实现快速鲁棒的匹配特征点 | 通过计算发射光的飞行时间来测距 | 通过两张RGB图像上特征点匹配方法,再通过三角测量计算深度 |
| 测距方式 | 主动 | 主动 | 被动 |
| 精度 | 近距离精度可达到0.01mm-1mm | 最高可达厘米级 | 近距离可达毫米极 |
| 测量范围 | 一般十米内 | 较远,一般100米内 | 一般只能测量近距离的距离,一般2米内 |
| 影响因素 | 不受光照和物体表面纹理影响,但受反光影响 | 不受光照和物体表面纹理影响,但受多重反光影响 | 受光照、物体表面纹理影响 |
| 户外性能 | 受影响 | 影响较小 | 无影响 |


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









