







cruise软件模型,cruise增程混动仿真模型,功率跟随控制策略,Cruise混动仿真模型,串联混动汽车动力性经济性仿真。
关于模型
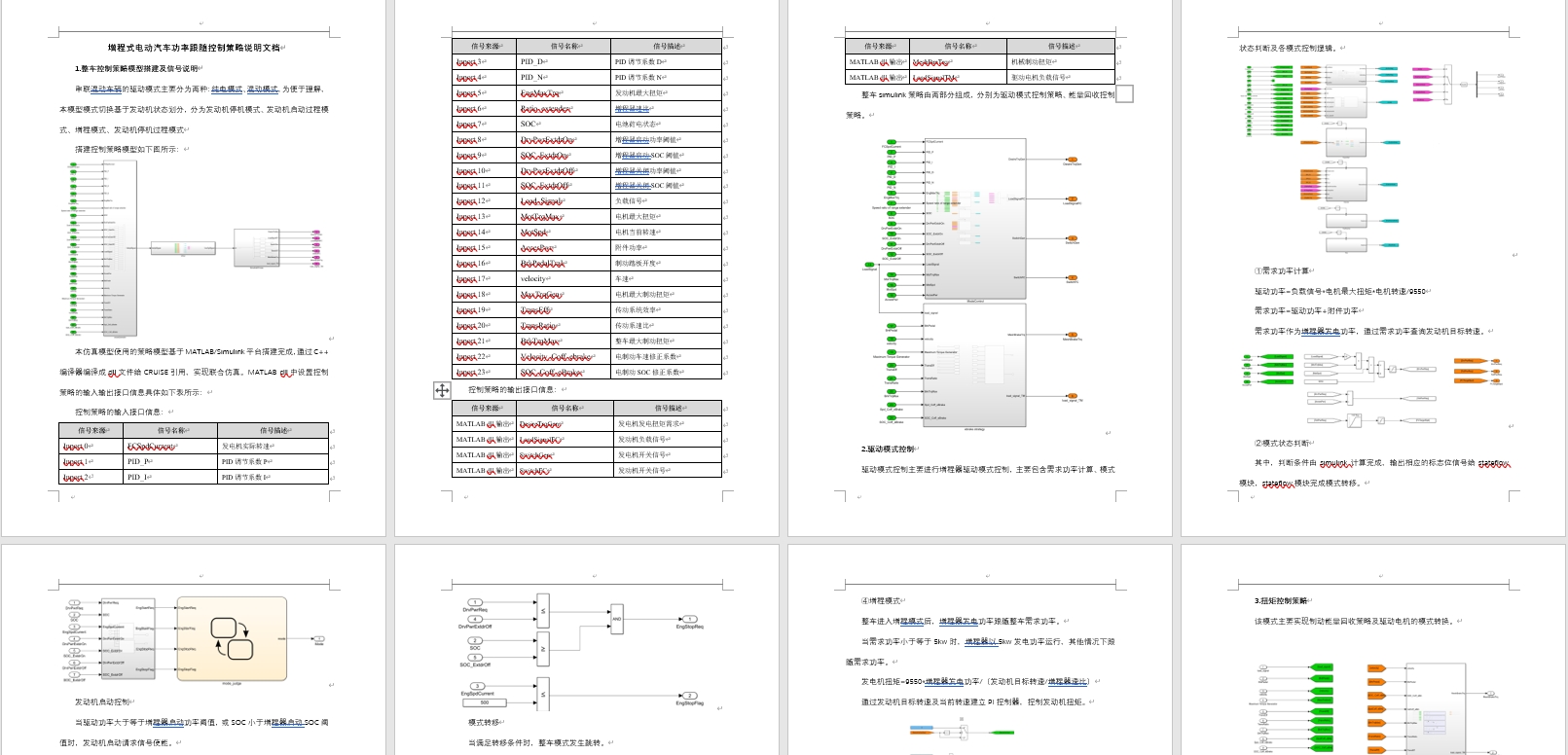
1.本模型是基于增程混动架构搭载的cruise仿真模型,控制策略为功率跟随控制,跟随对象为整车需求功率。
模型是基于cruise simulink搭建的base模型,策略模型基于MATLAB Simulink平台搭建完成,通过C++编译器编译成dll文件给CRUISE引用,实现联合仿真。
2.尽可能详细的描写了策略说明,大约11页左右,主要解释策略搭建逻辑及各模式间的转换。
3.模型主要供学习使用,不同的车型控制策略必然不同,请不要抱着拿来即用的态度购拿,具体车型仿真任务请根据需求自行变更模型。
4.使用模型前请确保有相应软件基础,是模型,不是软件教程。
5.模型亲自搭建,提供所有相关文件。
包含:cruise模型、simulink策略模型、策略说明文档。
6.DLL文件使用64位编译器编译,如出现无策略文件提示,请在模型界面选择“options→layout→platform→WIN64”;如仍不能运行,请检查模型目录是否存在中文 字符。
YID:9788667282219407
王浮生不怕生
 <
<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









