







 本文介绍了智能驾驶ADAS中的自适应巡航控制系统(ACC),详细阐述了ACC的功能,包括定速巡航、自主跟车、Stop&Go启停等,并通过系统状态机展示控制策略。此外,还解析了ACC算法模型,包括在simulink中的仿真框架和不同跟车距离下的控制逻辑,以及PID控制图的应用。
本文介绍了智能驾驶ADAS中的自适应巡航控制系统(ACC),详细阐述了ACC的功能,包括定速巡航、自主跟车、Stop&Go启停等,并通过系统状态机展示控制策略。此外,还解析了ACC算法模型,包括在simulink中的仿真框架和不同跟车距离下的控制逻辑,以及PID控制图的应用。
前言:
本系列文章将对智能驾驶ADAS算法进行完整的介绍,并在simulink中搭建算法模型,并在Prescan中搭建场景并且与simulink联合仿真对ADAS算法进行验证。智能驾驶ADAS算法详解及Prescan仿真系列文章将会对以下ADAS功能进行介绍与仿真:
1、前向碰撞预警 FCW算法
2、定速巡航系统 CC算法
3、自适应巡航系统 ACC算法 Adaptive Cruise Control
4、车道偏离预警 LDW Lane Departure Warning
5、车道纠偏辅助 LDP Lane Departure Prevention
6、车道居中辅助 LKA Lane Keep Assist
7、自动泊车算法 APA
8、自动紧急制动 AEB算法
9、行人保护 PDS
10、自动变道功能 LCS
智能驾驶ADAS算法设计及Prescan仿真(1): 自适应巡航ACC控制策略设计与simulink仿真
正文如下:
一、功能介绍:
在0~150km/h的速度范围内,自适应巡航ACC自动切换巡航和跟车模式,前方无车,按照驾驶员设定车速稳定行驶,前方有车,与前车保持驾驶员设定的安全距离行驶。当前车停车,自动跟随停车;前车起步,自动跟随起步或在驾驶员的指令下起步。
ACC系统的算法功能有以下子功能需要实现。
1) 定速巡航功能;
2) 自主跟车功能;
3) Stop&Go启停功能;
4) 驾驶员可通过开关进行ACC功能的开启与关闭;
5) 驾驶员可通过开关进行巡航速度设定;
6) 驾驶员可通过开关进行跟车时距设定;
ACC系统适用工况:(0~150km/h)直道工况;需要在半径大于125m的弯道正常运行,需要支持一定坡度的坡道。
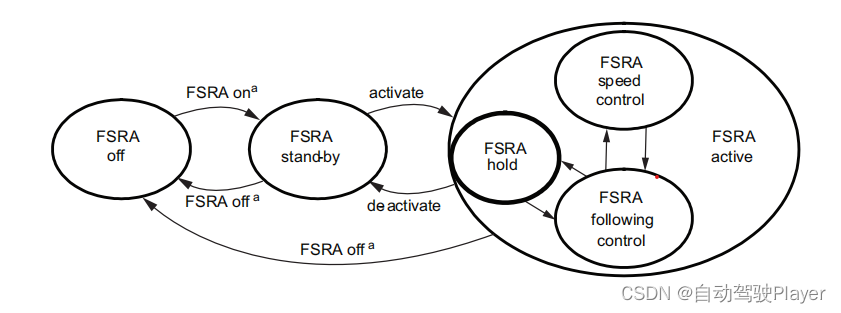
二、系统状态机
以下系统状态机为ACC 系统的基本控制策略
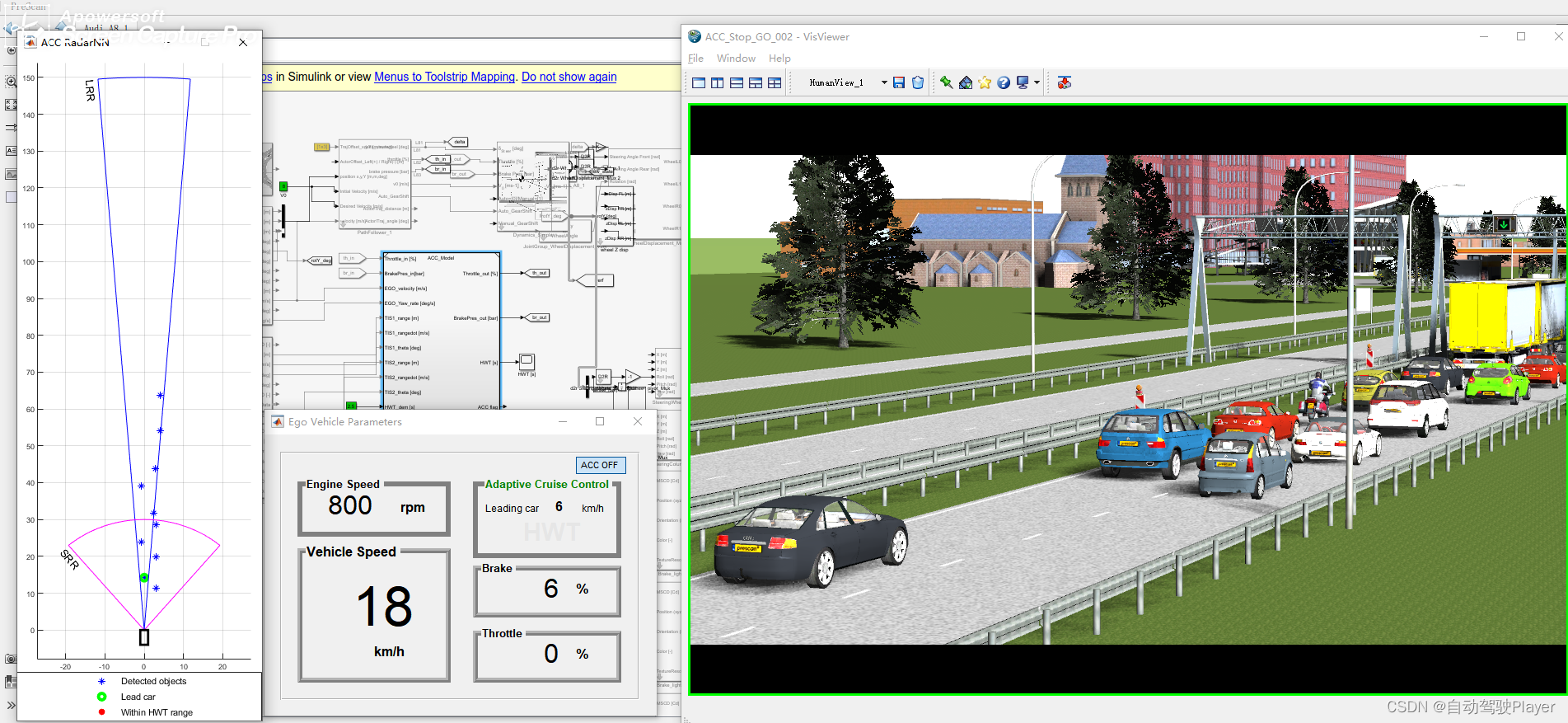
三、Prescan 仿真示例
仿真示意图:
四、自适应巡航ACC 算法模型解析
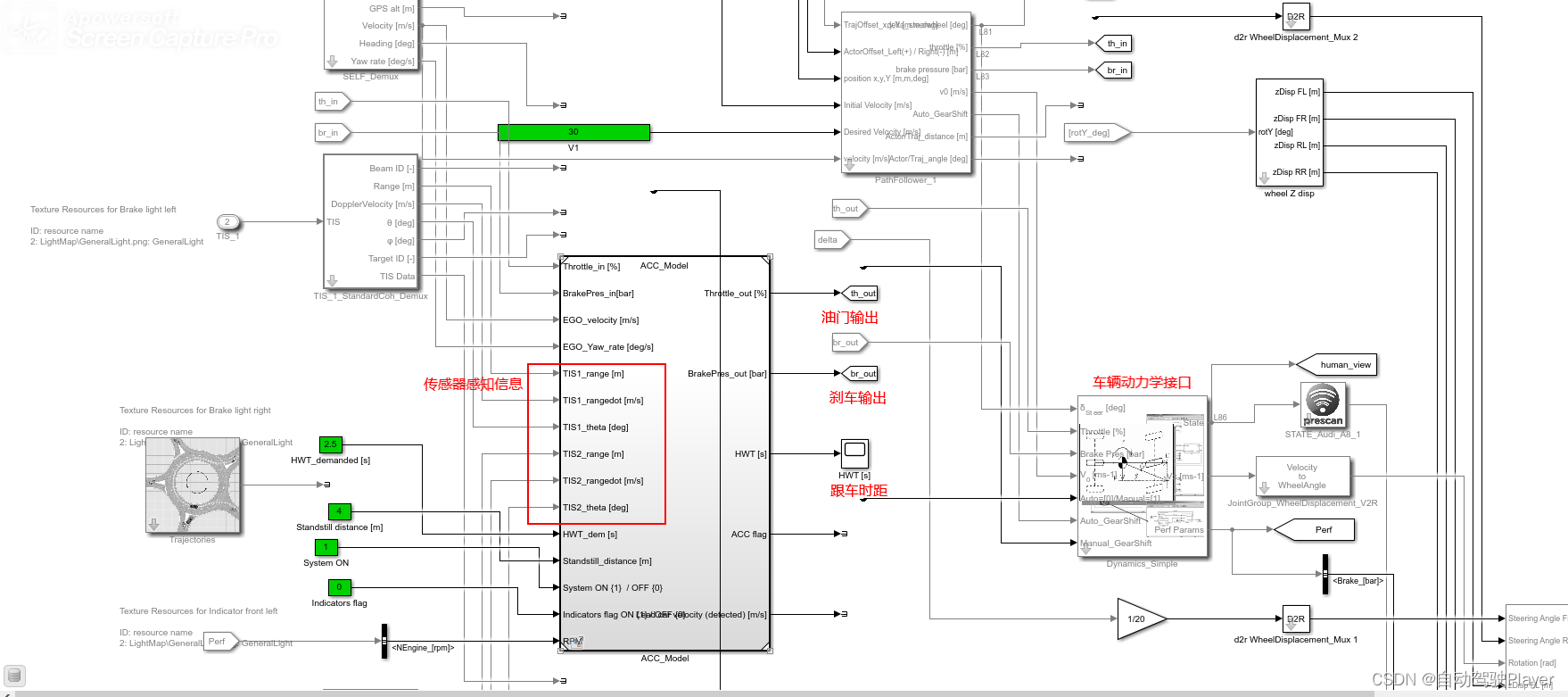
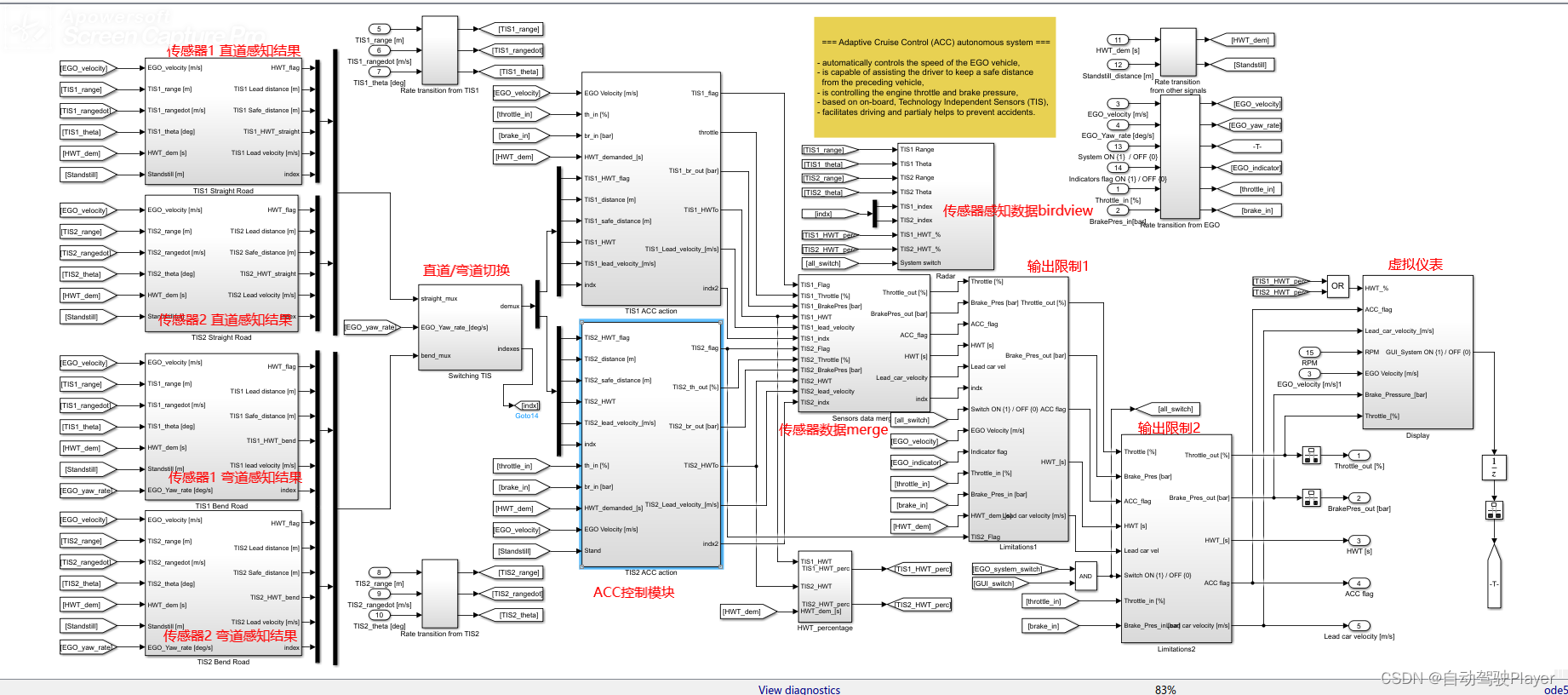
1、整体仿真环境框架解析
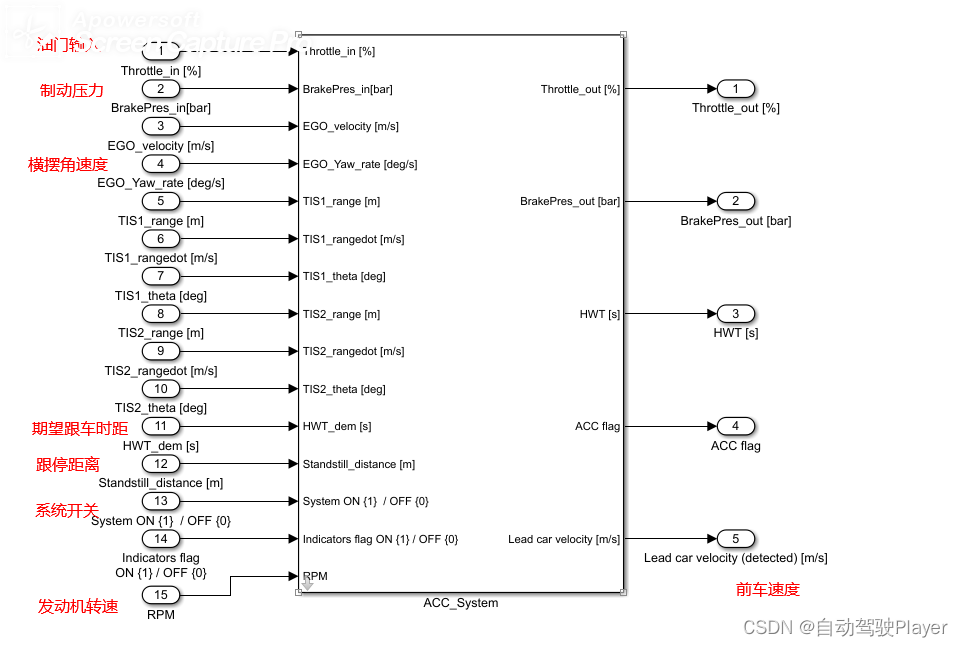
2、ACC模型输入输出接口
3、ACC 控制算法整体框架图解析
4、ACC控制算法介绍
4.1 整体框架
ACC控制算法的整体思路是:根据当前的跟车距离与相对速度,将当前场景分成多个子场景;先判断当前处于哪个子场景,然后执行对应场景下的控制逻辑。
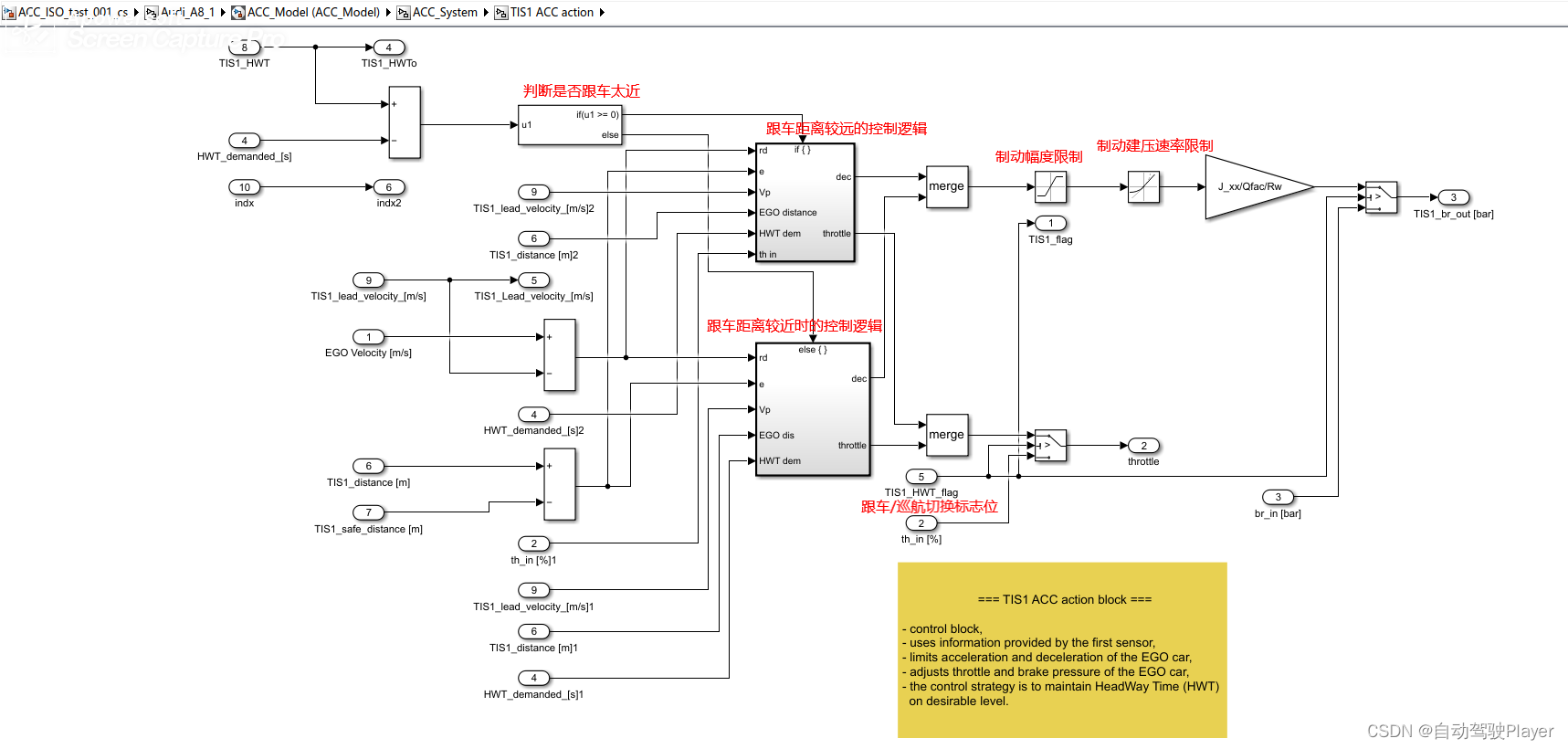
下面以跟车距离较远时的控制策略为例进行讲解。
4.2 跟车距离较远时的控制逻辑
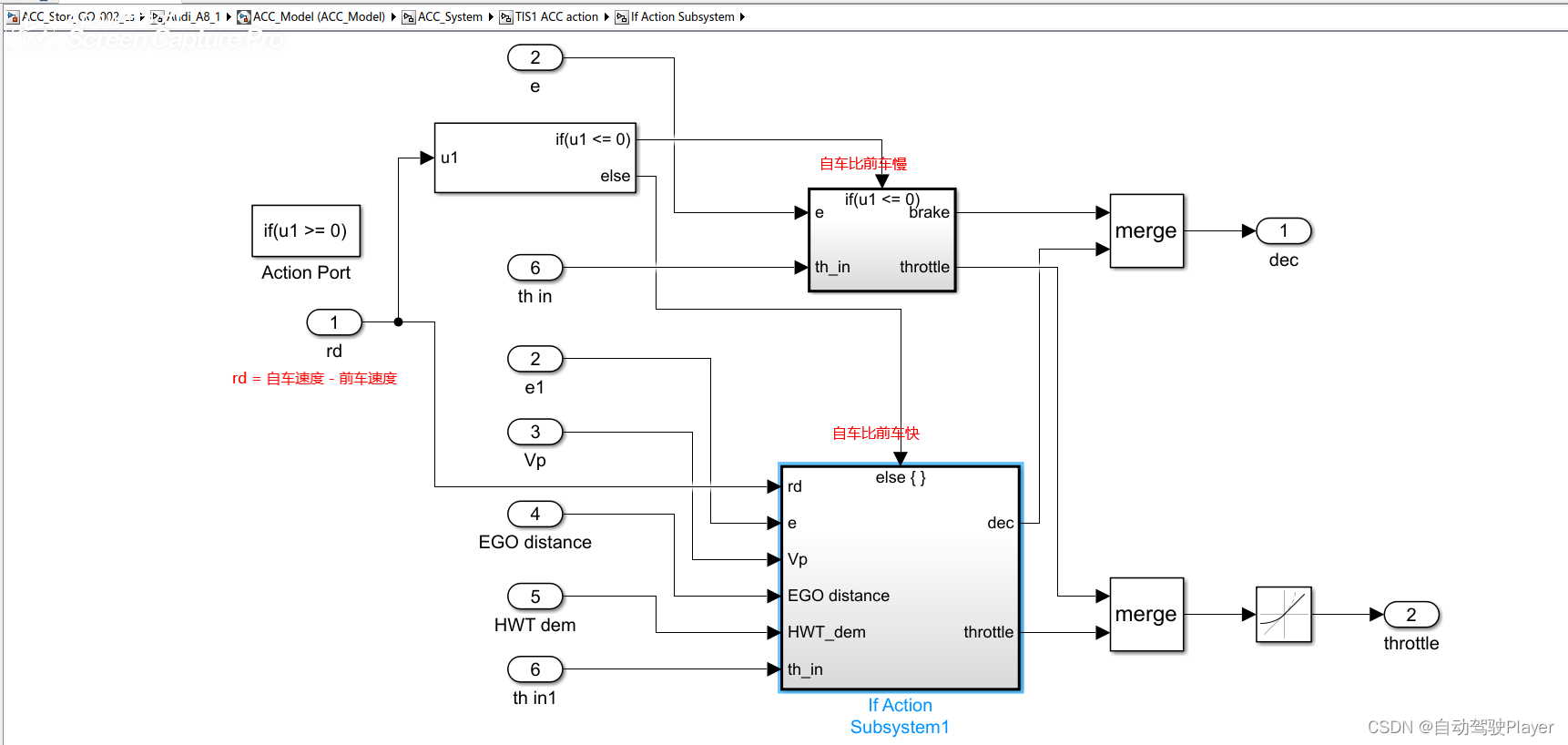
4.3 跟车距离较远且自车比前车快时的控制逻辑
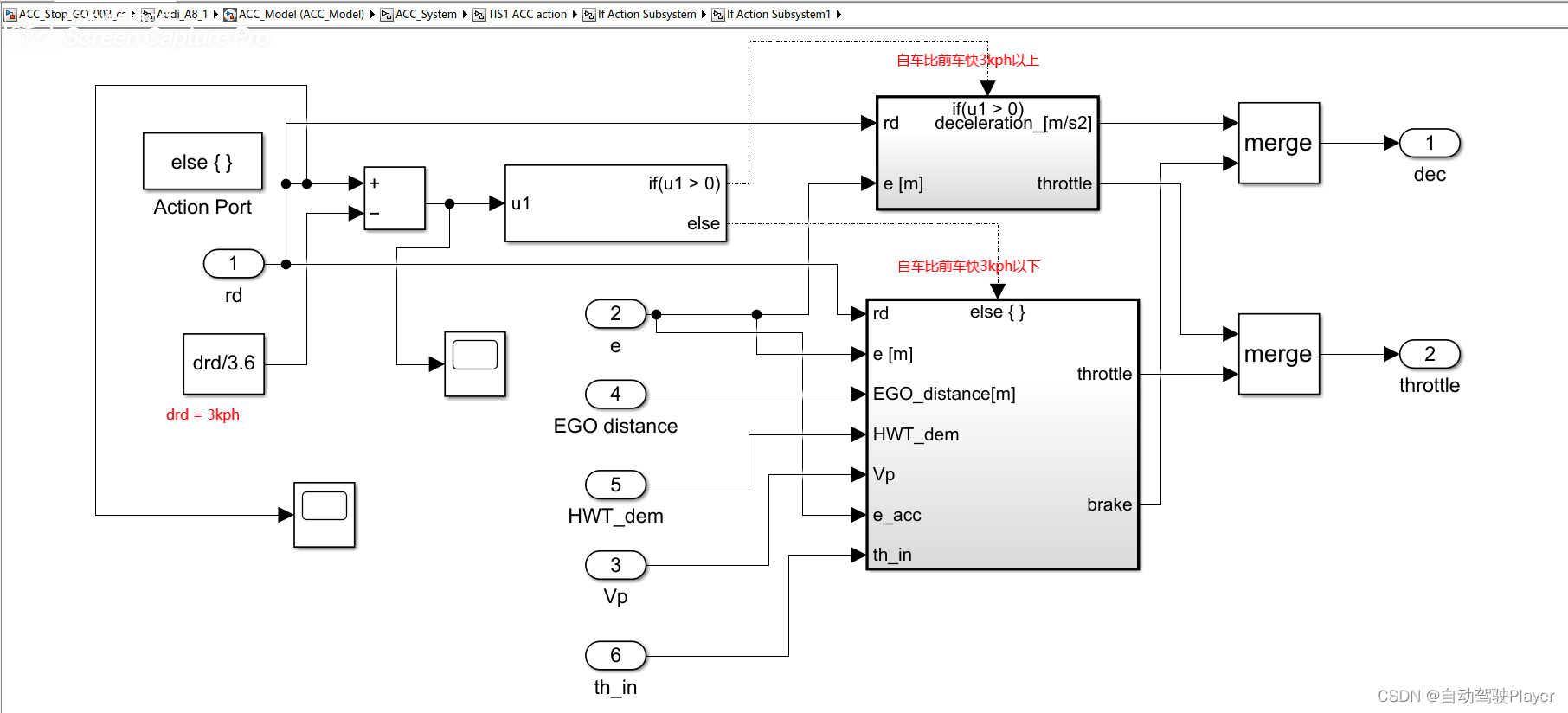
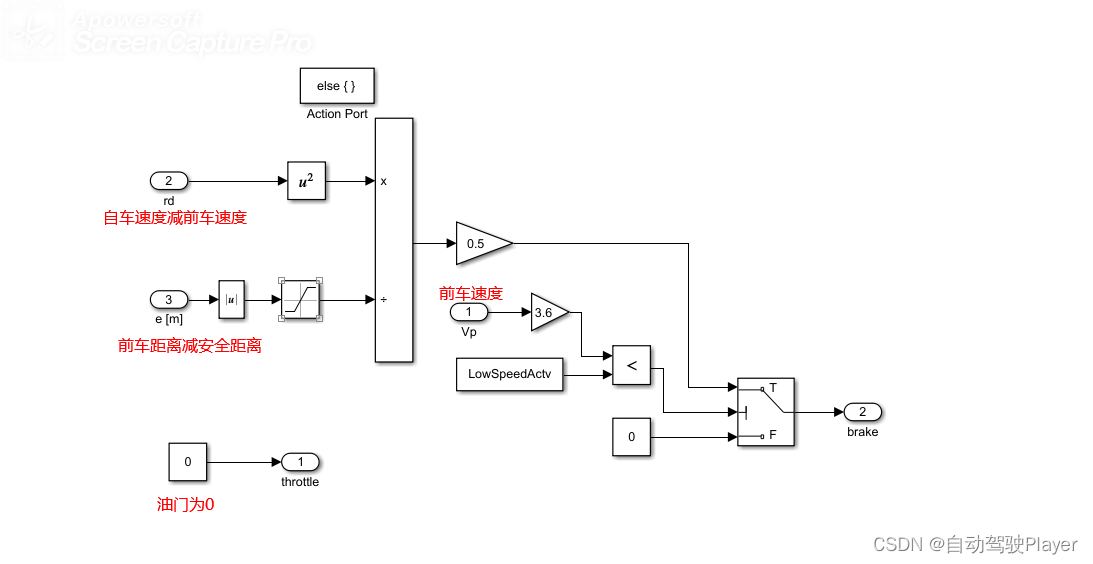
4.4 跟车距离较远且自车比前车快超过3kph时的控制逻辑
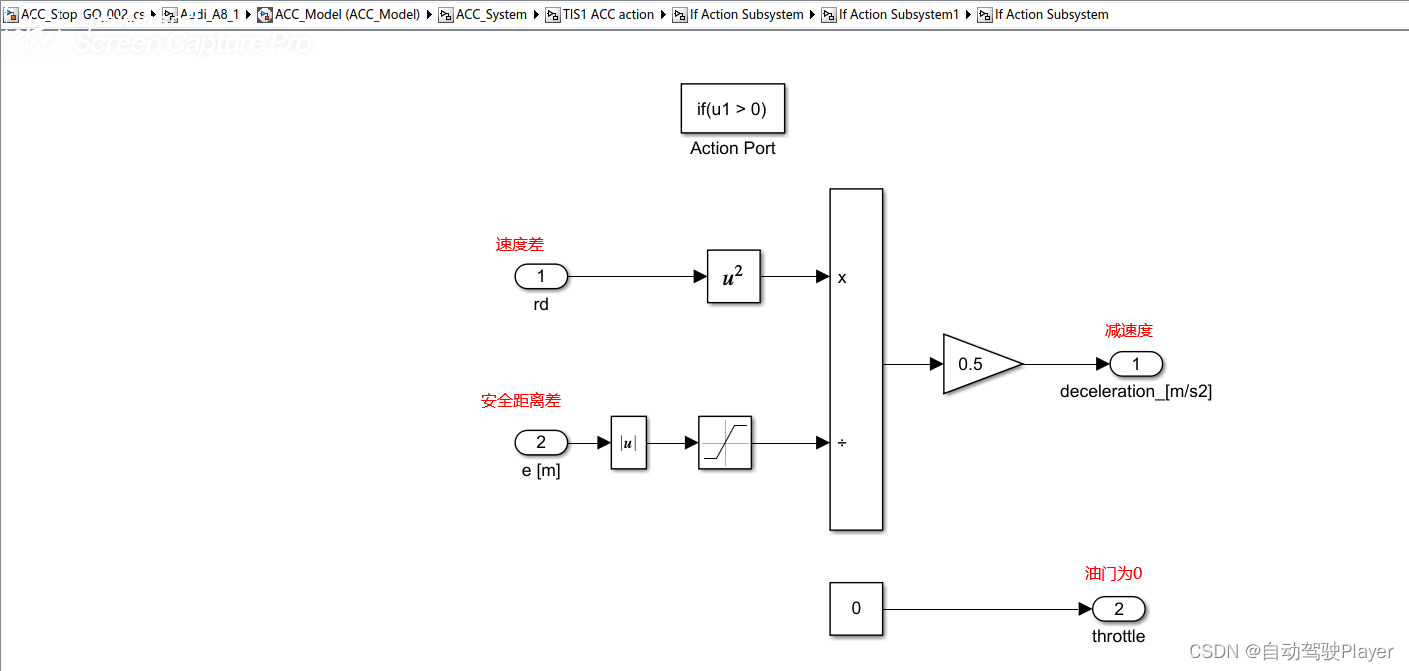
4.5 跟车距离较远且自车比前车快不超过3kph时的控制逻辑
判断前车是否足够远:
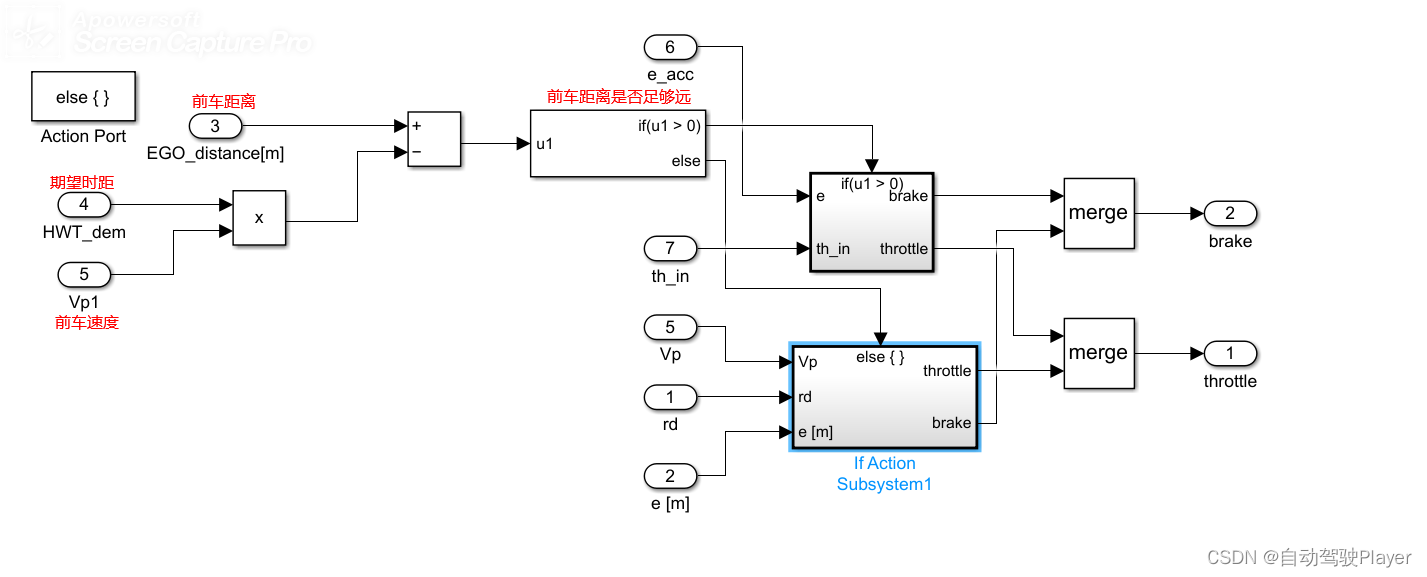
(1)当前车距离足够远时:
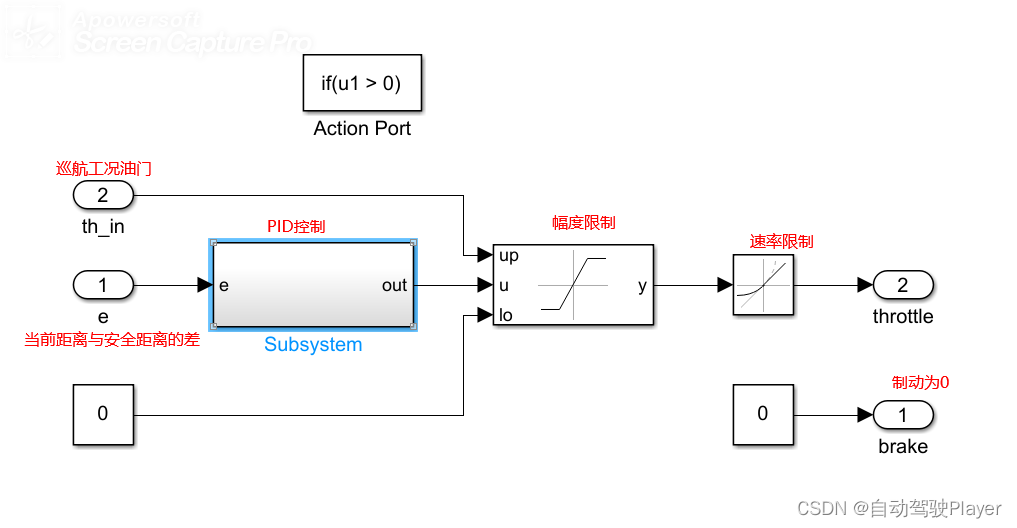
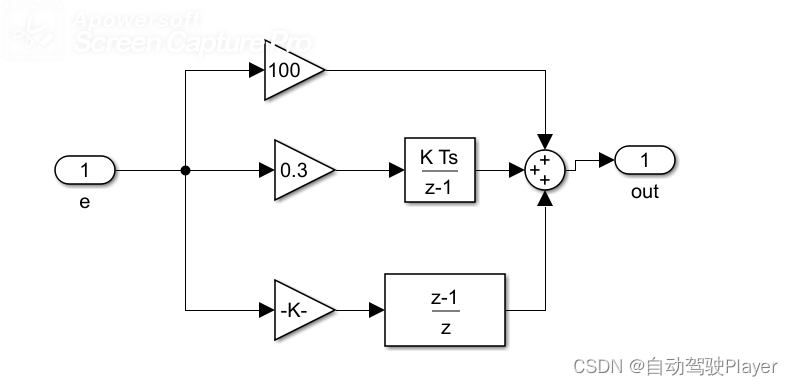
PID控制图如下:
(2)当前车距离并没有足够远时:


















 4401
4401

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











