






基于51单片机的扫地小车,扫地机器人设计。
有原理图,程序代码,原文。
可做实物。
主要功能有寻迹避障,来回清扫功能,往返清扫功能。
YID:3350665853241481
南唐开心的卷柏
基于51单片机的扫地小车,扫地机器人设计是一项极具挑战性和创新性的工程。本文将围绕这一主题展开深入的技术分析,旨在介绍设计的原理和实现的方法。
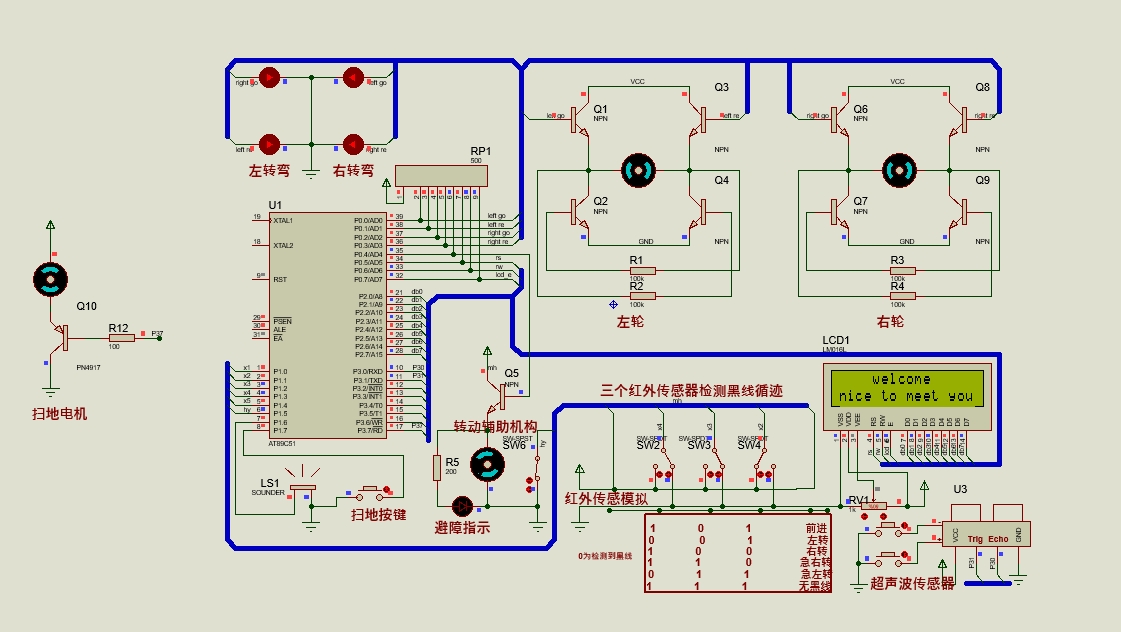
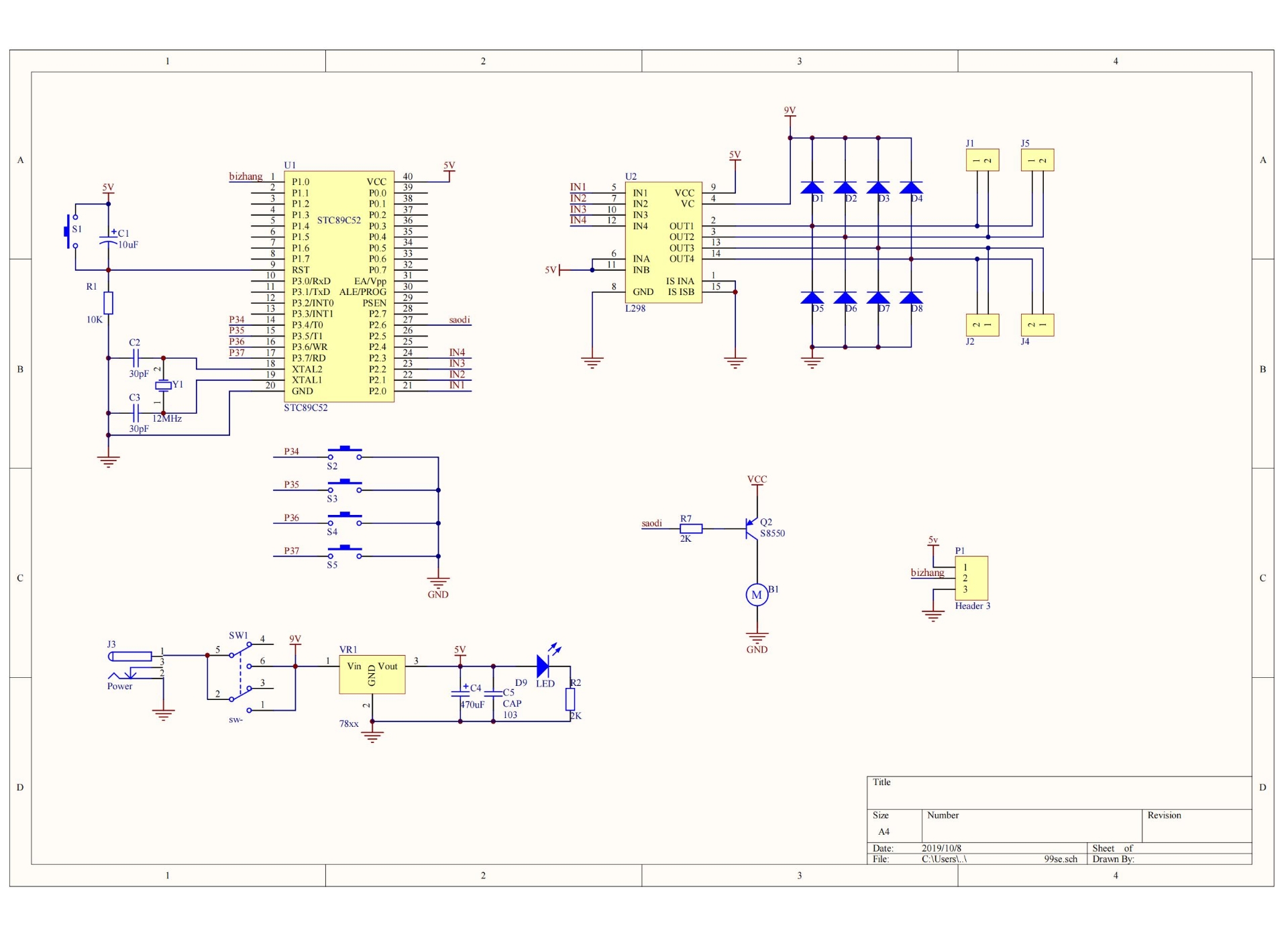
首先,让我们来了解一下这款基于51单片机的扫地小车的基本原理。这款小车是一个自动化的扫地机器人,其核心是采用了51单片机作为控制主板。它具有一套完整的寻迹避障系统和清扫功能,能够有效地在室内环境中进行清洁工作。
在该扫地小车的设计中,寻迹避障是其中的关键功能之一。它通过使用红外线传感器来检测地面上的黑线,并根据检测结果进行相应的动作控制。当小车检测到黑线时,它会根据预先设定的程序进行转向或停止,从而实现自动的导航和避障功能。这种寻迹避障系统的设计不仅提高了小车的智能化水平,还能有效提升清洁效率和用户体验。
除了寻迹避障功能,该扫地小车还具备来回清扫和往返清扫的功能。这些功能是通过精确的编程和控制算法实现的。当用户选择来回清扫功能时,小车将按照设定的路径来回清扫指定区域,从而确保地面的彻底清洁。而往返清扫功能则可以让小车按照设定的路径来回行进,达到更高效的清扫效果。这些功能的实现离不开51单片机强大的计算能力和灵活的控制手段。
关于实现方面,我们可以通过以下步骤来进行设计和制作这款基于51单片机的扫地小车:
第一步是设计电路原理图。根据所需功能,我们需要设计一个集成了51单片机、红外线传感器、电机驱动器以及其他相关电路的电路板。在这一步中,我们需要详细考虑各个元件的连接方式和电路布局,以确保整个系统的稳定性和可靠性。
第二步是编写程序代码。在这一步中,我们需要使用汇编语言或者高级语言来编写适用于51单片机的程序代码。该代码需要包括对红外线传感器、电机驱动器、路径规划以及其他功能的控制程序。在编写代码的过程中,我们需要综合考虑各个功能模块之间的交互和协同,确保系统的正常运行。
第三步是制作实物。在完成电路设计和程序编写后,我们需要将其制作成实物。这需要根据原理图进行焊接和布线,并将51单片机及其他元件固定在适当的位置。制作完成后,我们还需要进行系统的调试和测试,以确保其功能的正常运行。
综上所述,基于51单片机的扫地小车是一个集寻迹避障、来回清扫和往返清扫功能于一体的智能化扫地机器人。通过合理的电路设计、程序编写和实物制作,我们可以实现这一目标。这款扫地小车不仅具有实用性和高效性,还为我们展示了51单片机在自动化控制领域中的巨大潜力。未来,我们可以进一步优化和升级这一设计,使其更加智能化和人
以上相关代码,程序地址:http://wekup.cn/665853241481.html















 319
319











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









