







 本文详述了如何使用Smart200控制器通过PN通信控制两台V90伺服电机实现绝对定位和速度控制,提供了调试说明和PDF文档,有助于技术人员理解和应用。
本文详述了如何使用Smart200控制器通过PN通信控制两台V90伺服电机实现绝对定位和速度控制,提供了调试说明和PDF文档,有助于技术人员理解和应用。
Smart200控制两台V90伺服,绝对定位和速度控制,有屏程序,PN通信。
注释清楚,PDF调试说明,易懂。
标题:Smart200控制V90伺服实现绝对定位和速度控制技术研究
引言
随着工业自动化的不断发展,伺服系统在其中的应用越来越广泛。本文主要探讨了Smart200控制器如何控制两台V90伺服电机,实现绝对定位和速度控制,并提供了详细的注释说明和PDF调试文档。本文旨在为相关技术人员提供一些有用的参考和帮助。
正文
- Smart200控制器与V90伺服系统的连接
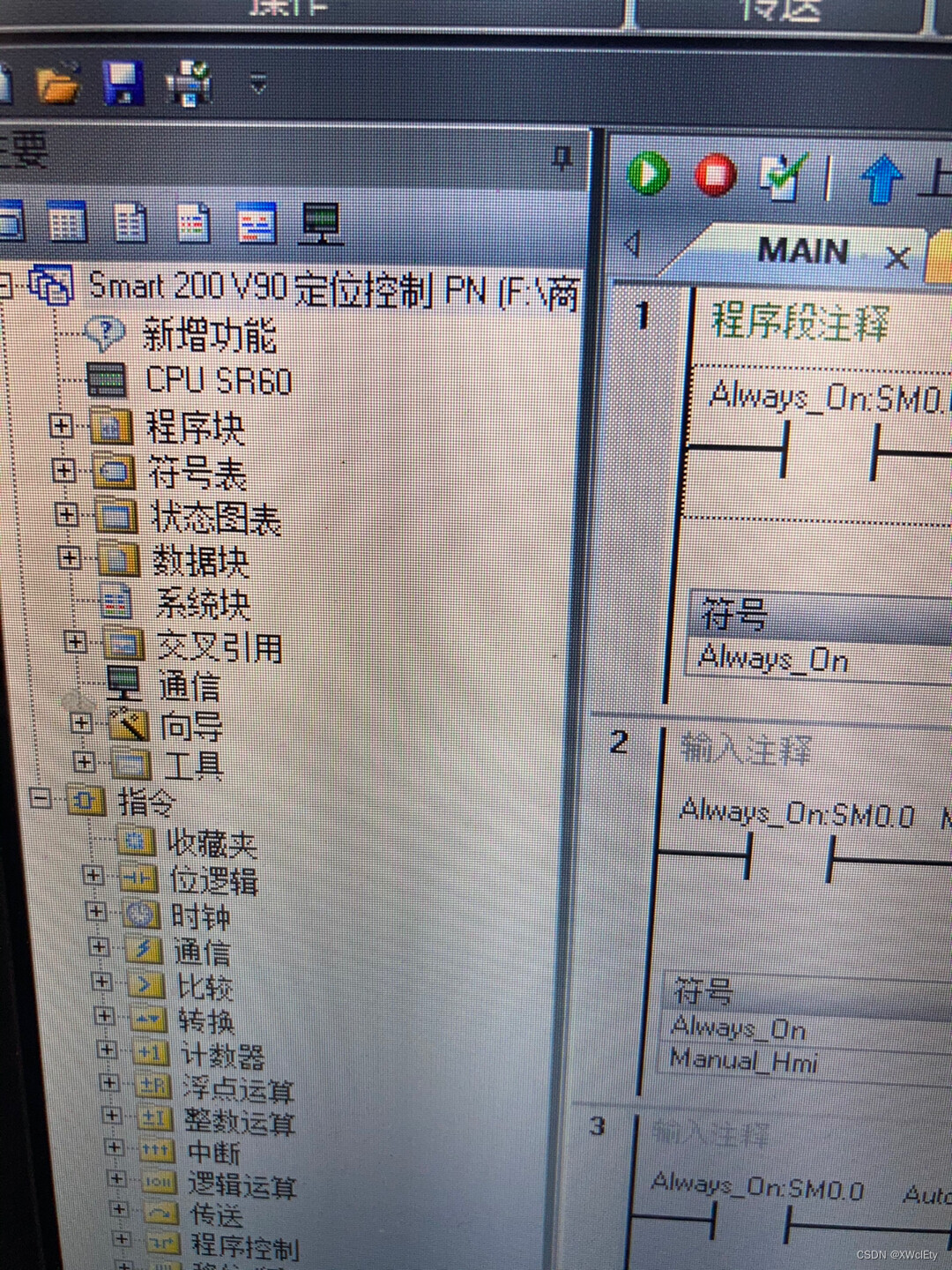
Smart200控制器通过PN通信接口与两台V90伺服系统进行连接。控制器与伺服驱动器之间通过RS485串口进行通信,以实现对伺服电机的精确控制。在本研究中,我们使用了Smart200控制器的两个通道,分别控制两台V90伺服电机。
- 绝对定位与速度控制策略
在Smart200控制器中,我们通过设置伺服电机的目标位置和速度来实现绝对定位和速度控制。首先,我们将目标位置和速
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2930
2930

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









