






主动悬架模糊控制,模糊pid控制
四旋翼飞行器模糊pid控制,自抗扰adrc控制
MATLAB SIMULINK
Smith控制,大林控制,神经网络,遗传算法
遗传算法优化pid,gapid
神经网络优化pid
温度控制,锅炉温度,压力,水箱,倒立摆,自动泊车等等
ID:794674263027207
徐同学不头秃1
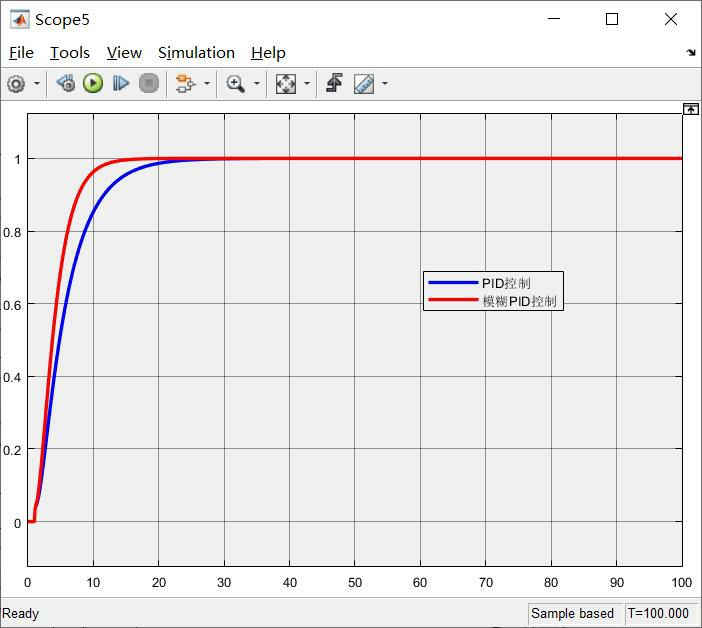
主动悬架模糊控制和模糊PID控制是当前自动控制领域的热门研究方向之一。在四旋翼飞行器中,模糊PID控制和自抗扰ADRC控制具有重要的应用价值。本文将围绕这些主题展开,结合MATLAB SIMULINK软件,以及Smith控制、大林控制、神经网络和遗传算法等方法,对主动悬架模糊控制和模糊PID控制进行深入分析。
在现代自动控制系统中,主动悬架系统被广泛应用于汽车、高铁等交通工具中。其核心目标是通过控制悬架系统来实现车辆在不同行驶条件下的舒适性和稳定性。主动悬架模糊控制是一种基于模糊逻辑的控制策略,通过将模糊控制与悬架系统结合,可以实现更加精准的控制效果。同时,模糊PID控制是一种在传统PID控制基础上引入模糊逻辑的控制方法,能够在复杂环境下保持较好的控制性能。
四旋翼飞行器作为一种新型无人飞行器,具有广泛的应用前景。在其飞行过程中,需要对其姿态和位置进行精确控制。模糊PID控制作为一种简单且有效的控制方法,在四旋翼飞行器中得到了广泛应用。通过对飞行器的姿态和位置进行模糊PID控制,可以实现飞行器的稳定飞行和精确操控。
而自抗扰ADRC控制是一种新兴的控制策略,可以有效地抑制外界扰动对飞行器的影响。在四旋翼飞行器中,自抗扰ADRC控制可以通过模型自适应和扰动观测器等方法,实现对飞行器的自适应抗扰控制,提高系统的鲁棒性和稳定性。
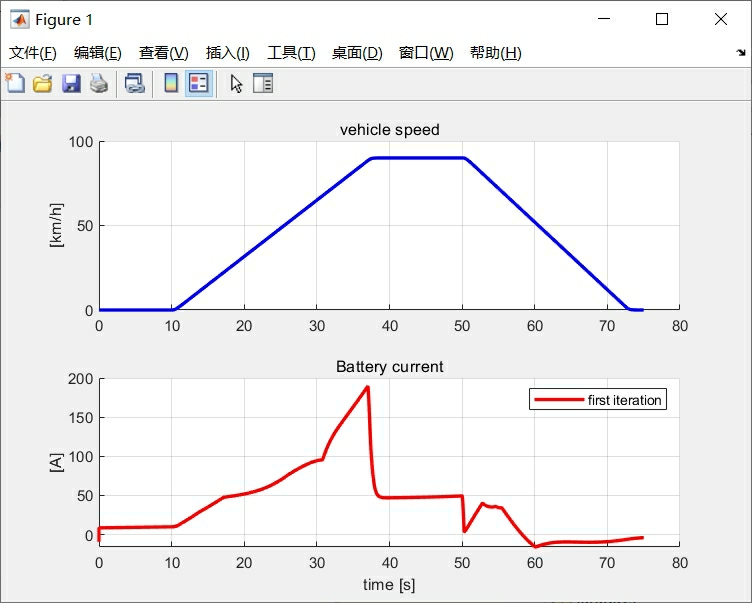
MATLAB SIMULINK是一种常用的仿真软件,可以方便地对控制系统进行建模和仿真。在主动悬架模糊控制和模糊PID控制中,可以利用MATLAB SIMULINK来搭建控制系统的模型,并进行仿真实验。通过仿真实验可以验证控制算法的性能和稳定性。
除了模糊控制和PID控制,本文还将介绍Smith控制、大林控制、神经网络和遗传算法等先进控制方法在主动悬架模糊控制和模糊PID控制中的应用。Smith控制是一种经典的控制方法,通过对系统的时域响应进行补偿,可以实现系统的稳定性和响应速度的优化。大林控制是一种基于线性二次型控制理论的优化控制方法,可以通过求解线性二次型最优控制问题,得到最优控制器的参数。神经网络和遗传算法是两种基于智能优化的控制方法,可以通过模拟生物智能的方式对系统进行优化控制。
最后,本文将介绍温度控制、锅炉温度、压力、水箱、倒立摆和自动泊车等具体应用案例。这些应用案例将围绕主动悬架模糊控制和模糊PID控制展开,通过对温度、压力、位置等参数的控制,实现对具体系统的精确控制。
综上所述,本文围绕主动悬架模糊控制和模糊PID控制展开,结合MATLAB SIMULINK软件以及Smith控制、大林控制、神经网络和遗传算法等方法,对这些控制策略进行了深入分析。通过具体应用案例的介绍,展示了这些控制方法在温度控制、倒立摆控制和自动泊车等领域的应用。希望本文能够为读者提供对主动悬架模糊控制和模糊PID控制的深入理解,并对相关领域的研究和应用提供一定的参考价值。
相关的代码,程序地址如下:http://wekup.cn/674263027207.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









