




前言
这篇文章主要是讲解一下CLI源码,前段时间看automated_parking源码,只是知道CLI用于将上位机发送的命令传给AWR1843 EVM,而且也知道是通过串口来进行发送的,当时也没有太多关注内部是怎么实现的,今天和一位成电的研三学姐聊天,学姐突然提到这个问题,这个触及到了知识盲区,因此对CLI进行了重新的审视。下面,进入正文。
正文
看任何程序首先是从main函数开始,依次找到MRR_MSS_initTask()->MRR_MSS_CLIInit (),CLI映入眼帘,下面主角就登场了,进入函数内部
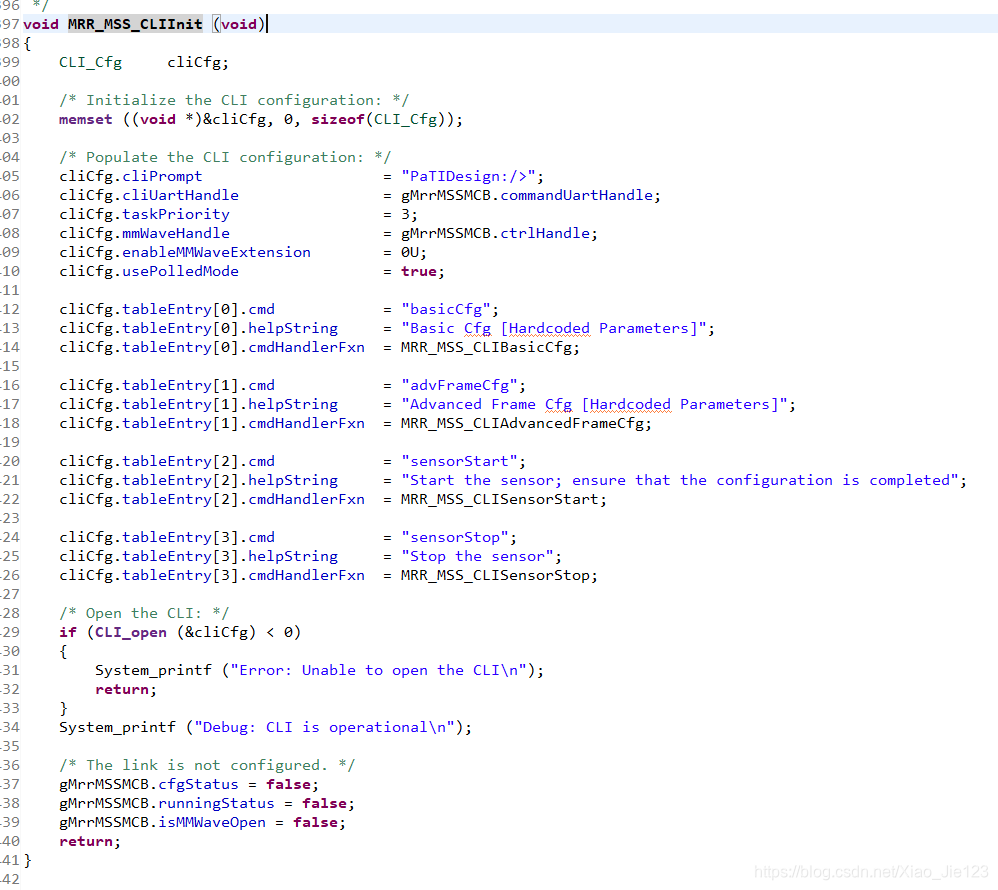
405行至410行就是对cli进行一些基本的配置,下面是CLI_Cfg结构体的内容:
typedef struct CLI_Cfg_t
{
/**
* @brief CLI Prompt string (if any to be displayed)
*/
char* cliPrompt;
/**
* @brief Optional ban 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 876
876




 到【灌水乐园】发言
到【灌水乐园】发言









