






引言
精确控制小车的运动方向和角度对于自动化和机器人技术至关重要。本文将介绍如何使用51单片机结合L298N电机驱动模块控制直流电机,并通过SG-90舵机实现小车转向的精确角度控制,同时详细解释PWM(脉冲宽度调制)在这一过程中的应用。
背景知识
PWM(脉冲宽度调制)
PWM是一种模拟信号控制技术,通过改变方波信号的占空比来控制模拟设备的功率。在电机控制中,PWM用于调节电机的速度和方向,以及舵机的角度。
51单片机(具备三个定时器)
51单片机是一款经典的微控制器,具有丰富的I/O端口和内置定时器,非常适合用于控制电机和舵机。

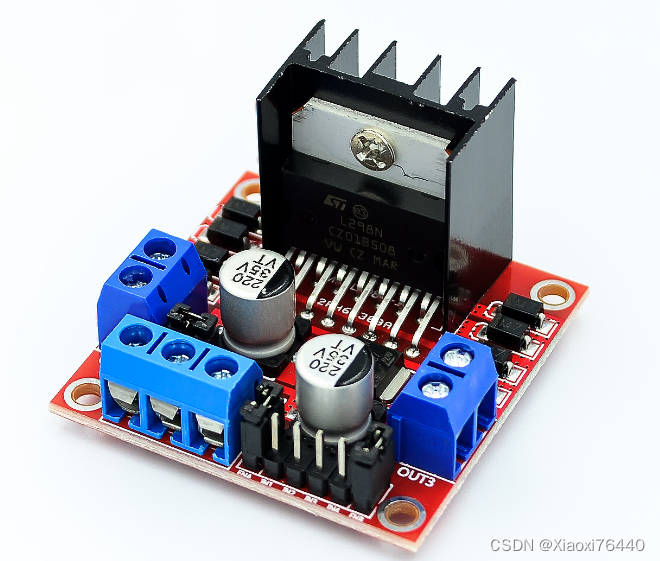
L298N电机驱动模块(双桥结构)
L298N是一款双全桥驱动模块,适用于驱动两个直流电机,支持PWM调速。
MG310直流电机(带霍尔编码传感器)
MG310直流电机是一款小型电机,适用于小车等移动平台的驱动。

SG-90舵机
SG-90舵机是一款180度旋转的舵机,适用于实现精确的角度控制。

材料和工具
- 51单片机开发板(具备三个定时器)
- L298N电机驱动模块
- MG310直流电机 x2
- SG-90舵机 x1
- 小车底盘
- 杜邦线
- 电源适配器
- Keil uVision IDE或其他C语言开发环境
实验步骤
硬件连接
- 直流电机连接:将两个MG310直流电机连接到L298N电机驱动模块的电机接口。
- 舵机连接:将SG-90舵机的电源、信号和地线分别连接到51单片机的I/O端口。
- 电源连接:为所有组件提供稳定的电源。
软件配置
-
定时器配置:
- 定时器0和1用于产生PWM信号,控制直流电机的速度和方向。
- 定时器2用于产生周期性脉冲,控制SG-90舵机的角度。
-
I/O端口配置:配置用于控制电机方向和舵机信号的I/O端口。
编程指南
初始化代码
//电机驱动模块
void PWM_Init()
{
TMOD &= 0xF0; // 清除TIMER0设置
TMOD |= 0x02; // 设置TIMER0为模式2(8位自动重装模式)
TH0 = 256 - PWM_duty1; // 设定初始值
TL0 = 256 - PWM_duty1; // 设定初始值
ET0 = 1; // 使能TIMER0中断
TR0 = 1; // 启动TIMER0
TMOD &= 0x0F; // 清除TIMER1设置
TMOD |= 0x20; // 设置TIMER1为模式2(8位自动重装模式)
TH1 = 256 - PWM_duty2; // 设定初始值
TL1 = 256 - PWM_duty2; // 设定初始值
ET1 = 1; // 使能TIMER1中断
TR1 = 1; // 启动TIMER1
EA = 1; // 开启总中断
}
//舵机
void Timer2_Init() {
T2CON = 0x00; // Timer2 in 16-bit auto-reload mode
TH2 = 0xFF; // Set initial values for high and low bytes
TL2 = 0xA4; // This sets a delay of about 20ms
RCAP2H = 0xFF; // Reload value for high byte
RCAP2L = 0xA4; // Reload value for low byte
ET2 = 1; // Enable Timer2 interrupt
TR2 = 1; // Start Timer2
EA = 1; // Enable global interrupts
}控制函数实现
- 电机控制:通过设置MOTOR_A_DIR和MOTOR_B_DIR来控制电机的转向,通过定时器0和1的PWM输出来控制电机的速度。
- 舵机控制:通过定时器2产生特定宽度的脉冲,控制SG-90舵机转动到指定角度。
测试和调试
- 电机测试:测试直流电机的正反转和速度控制。
- 舵机测试:测试舵机在不同角度的控制响应。
- 小车集成测试:将电机和舵机集成到小车上,测试小车的直线运动、转向和角度控制。
结论
本文详细介绍了如何使用51单片机控制L298N电机驱动模块、步进电机和SG-90舵机,实现小车的精确角度转动和运动控制。通过PWM的应用,读者将掌握电机和舵机的控制原理,为开发更复杂的自动化和机器人项目打下坚实的基础。
附录
- 完整代码:提供实验中使用的完整C语言代码。
- 参考资料:推荐阅读的相关资料和在线资源。















 8693
8693











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









