







说明:此处暂时简单介绍下各种特征提取算法,后续完善。
前言:模式识别中进行匹配识别或者分类器分类识别时,判断的依据就是图像特征。用提取的特征表示整幅图像内容,根据特征匹配或者分类图像目标。常见的特征提取算法主要分为以下3类:
①基于颜色特征:如颜色直方图、颜色集、颜色矩、颜色聚合向量等;
②基于纹理特征:如Tamura纹理特征、自回归纹理模型、Gabor变换、小波变换、MPEG7边缘直方图等;
③基于形状特征:如傅立叶形状描述符、不变矩、小波轮廓描述符等;
下面主要介绍常用的特征提取算法(前三个是分类器应用中常见的3个特征提取算法):
1、LBP特征提取算法
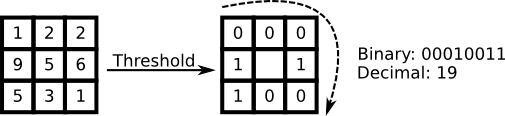
答:LBP(Local Binary Patterns,局部二值模式)是提取局部特征作为判别依据的,为一种有效的纹理描述算子,度量和提取图像局部的纹理信息,对光照具有不变性。有多种改进型,LBP结合BP神经网络已经用于人脸识别等领域。LBP的基本思想是定义于像素的8邻域中, 以中心像素的灰度值为阈值, 将周围8 个像素的值与其比较, 如果周围的像素值小于中心像素的灰度值, 该像素位置就被标记为0, 否则标记为1. 每个像素得到一个二进制组合, 就像00010011. 每个像素有8个相邻的像素点,即有2^8种可能性组合。如下:
LBP的改进与优化:
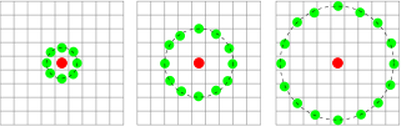
(1)改进的圆形邻域LBP:为了适应不同尺度的纹理特征, 并达到灰度不变性的要求, 相关学者对 LBP 算子进行了改进, 将 3×3 邻域扩展到任意邻域, 并用圆形邻域代替了正方形邻域。这样如果一个在圆上的点不在图像坐标上, 用它周围的像素值内插得到。如下:
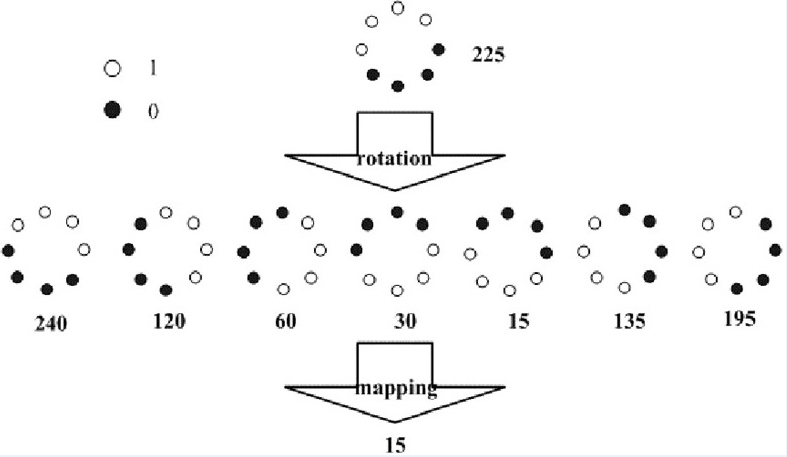
(2)旋转不变LBP:从 LBP 的定义可以看出, LBP 算子是灰度不变的, 但却不是旋转不变的. 图像的旋转就会得到不同的 LBP值。有关学者将 LBP 算子进行了扩展, 提出了具有旋转不变性的 LBP 算子, 即不断旋转圆形邻域得到一系列初始定义的 LBP 值, 取其最小值作为该邻域的 LBP 值。如下图给出了这个过程:
应用:LBP主要应用在纹理分类、人脸分析等。LBP特征提取结果还是大小相同的一幅图像,但一般都不直接将LBP图谱作为特征向量用于分类识别,而是采用LBP特征谱的统计直方图作为特征向量用于分类识别。
不变性:改进型LBP具有尺寸和旋转不变性。
更详细参考:http://blog.csdn.net/SoaringLee_fighting/article/details/52699381
2、HOG特征提取算法
答:方向梯度直方图(Histogram of Oriented Gradient, HOG)特征是一种在计算机视觉和图像处理中用来进行物体检测的特征描述子。它通过计算和统计图像局部区域的梯度方向直方图来构成特征。Hog特征结合SVM分类器已经被广泛应用于图像识别中,尤其在行人检测中获得了极大的成功。需要提醒的是,HOG+SVM进行行人检测的方法是法国研究人员Dalal在2005的CVPR上提出的,而如今虽然有很多行人检测算法不断提出,但基本都是以HOG+SVM的思路为主。
不变性:具有光照不变性,不具有尺寸和旋转不变性。
应用:HoG算法提取的是图像各个像素梯度的统计直方图,一般会将这些梯度直方图转化成一个向量,用于分类器的训练输入。
具体参考:http://blog.csdn.net/abcjennifer/article/details/7365651和http://blog.csdn.net/soaringlee_fighting/article/details/52693843。
3、Haar特征提取算子
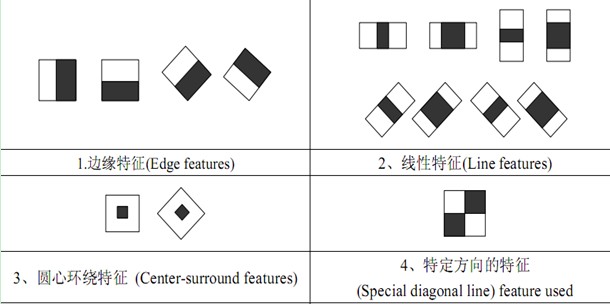
答:常和AdaBoost结合用于识别人脸。Haar特征很简单,分为三类:边缘特征、线性特征、中心特征和对角线特征,组合成特征模板。特征模板内有白色和黑色两种矩形,并定义该模板的特征值为白色矩形像素和减去黑色矩形像素和。Haar特征值反映了图像的灰度变化情况。例如:脸部的一些特征能由矩形特征简单的描述,如:眼睛要比脸颊颜色要深,鼻梁两侧比鼻梁颜色要深,嘴巴比周围颜色要深等。但矩形特征只对一些简单的图形结构,如边缘、线段较敏感,所以只能描述特定走向(水平、垂直、对角)的结构。
Haar的4种特征提取模板矩形如下图(色块矩阵姿态包括水平、垂直、斜45度):
具体参考:http://blog.csdn.net/xizero00/article/details/46929261和http://blog.csdn.net/xiongchao99/article/details/78807876。
4、LoG特征提取算法
答:LoG(DoG是一阶边缘提取)是二阶拉普拉斯-高斯边缘提取算法,先高斯滤波然后拉普拉斯边缘提取。Laplace算子对通过图像进行操作实现边缘检测的时,对离散点和噪声比较敏感。于是,首先对图像进行高斯卷积滤波进行降噪处理,再采用Laplace算子进行边缘检测,就可以提高算子对噪声抗干扰能力, 这一个过程中高斯-拉普拉斯(Laplacian of Gaussian(LOG))边缘检测算子就诞生了。
具体参考:http://blog.csdn.net/tonyshengtan/article/details/43794359。
5、Harris角点特征提取算法
答:参考http://www.cnblogs.com/ronny/p/4009425.html和http://www.cnblogs.com/zhchoutai/p/7182438.html
6、SIFT特征提取算子
答:SIFT算子是一种检测局部特征的算法,该算法通过求一幅图中的特征点及其有关尺寸和方向的描述子得到特征并进行图像特征点匹配,获得了良好效果。每个特征点的SIFT特征是128维向量,因此计算量巨大。
不变性:具有尺寸和旋转不变性。
改进型:PCA-SIFT,如名称所说“主成分SIFT特征”,主要提取了128维特征向量中的20个特征,大大减少了计算。
具体参考:http://www.cnblogs.com/liuchaogege/p/5155739.html和http://blog.csdn.net/abcjennifer/article/details/7639681。
7、SURF特征提取算法
答:SURF是SIFT角点检测算法的改进版,主要体现在速度上,SURF是SIFT速度的3倍。SIFT在尺度和旋转变换的情况下匹配效果比SURF好,而SURF在亮度变化下匹配效果比较好。具体参考:http://www.cnblogs.com/tornadomeet/archive/2012/08/17/2644903.html。















 2106
2106

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









