







基于AM5728 DSP+ARM的物流机器人,实现自动化分拣投递

亚马逊物流机器人实物图:


功能概述与应用领域
国内物流业起步较晚,发展水平较低,在信息技术的应用方面与发达国家有很大差距,发达国家已普遍使用的一些技术设备在国内还很少使用,我国在物流费用上的经济损失每年达数百亿元,实现物流信息化已成为我国现代物流发展的必然趋势。
快递物流的条形码识别系统的实施提升了物流企业的信息化水平,并可大大提高工作效率,降低成本,减少差错。
系统在物流卸货后的最前端,采用工业视觉识别技术对包件面单条形码自动扫描。
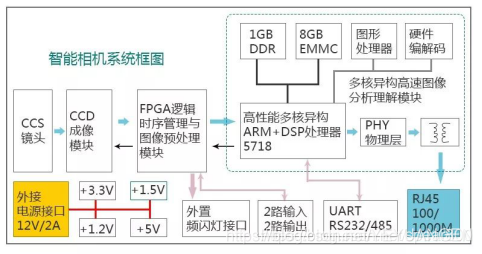
该技术利用智能相机对面单进行图像采集,将采集的图像传输至图像处理板卡中进行算法处理,得到条形码的数据,然后再将条码数据与计泡机上现有的重量与体积综合,最后通过2G/3G/4G技术将数据传输给数据服务器,方便分拣中心后期实现自动化分拣系统。
应用领域包括:韵达、顺丰、圆通、申通等快递公司物流的自动化分拣投递。
总体设计方案及关键模块
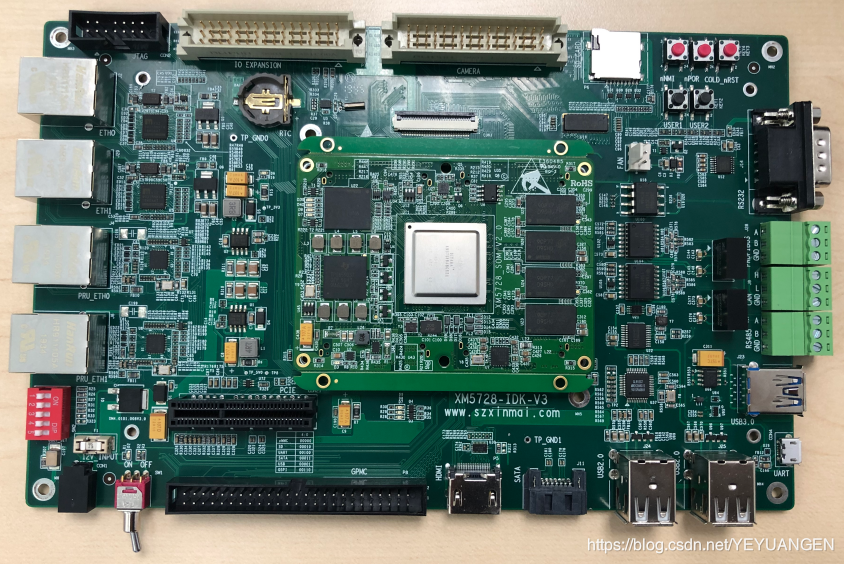
▼基于核心板的图像采集与处理硬件系统
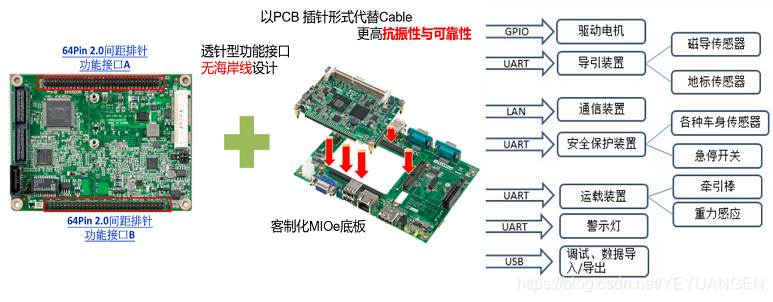
如上图所示,XM5728-DIK-V3尺寸小巧,采用无海岸线设计,所有的功能接口都是通过pin针拉出,但主板本身自带的功能并不能完全满足客户,因此客户自己设计了一块底板,将需要的全部功能通过MIOe扩展接口以及主板的pin针扩展,以PCB替代cable,非常顺利的将所需功能做在了底板上,快速高效的满足了接口、散热、机构、抗震等需求。信迈提供了包括线路图review ,协助Debug测试等在内的完善的技术支持。


分拣系统的视觉检测原理
视觉检测包含两部分:检测包裹的颜色、形状;包裹单上的条形码识别
1. 包裹的颜色、形状检测
首先,利用一台彩色相机对包裹进行识别,当包裹到达相机正下方,触发相机拍照并采集图像,处理器AM5728将采集的图像进行识别,并通过算法进行处理。
其中识别算法具体为:
❶ 对采集的图像进行去噪处理;
❷ 其次根据颜色特征对图像进行分割处理,将包裹所在区域与背景分离,根据分割出的包裹区域的边缘特征可计算出包裹的形状特征;
❸ 在图像中包裹所在区域,利用连通区域分析及包裹单的颜色特征、矩形形状特征,识别出包裹单的所在位置。根据去除包裹单区域后剩余的图像中包裹区域,判断包裹的颜色特征。
2. 条形码识别
采用四个相机同时在横向方向对包裹进行拍照处理。根据上步得到的形状特征判断相机拍照次数,使得每个包裹表面纵向区域均被相机拍到。
识别算法具体为:
❶ 对采集的图像进行去噪处理
❷ 检测所处理图像中是否存在条形码
❸ 对存在条形码区域的图像,进行条码区域精确定位及识别,并将结果输出到上位机界面。
固定式图像型智能相机的主要核心技术, 具备以下特点:
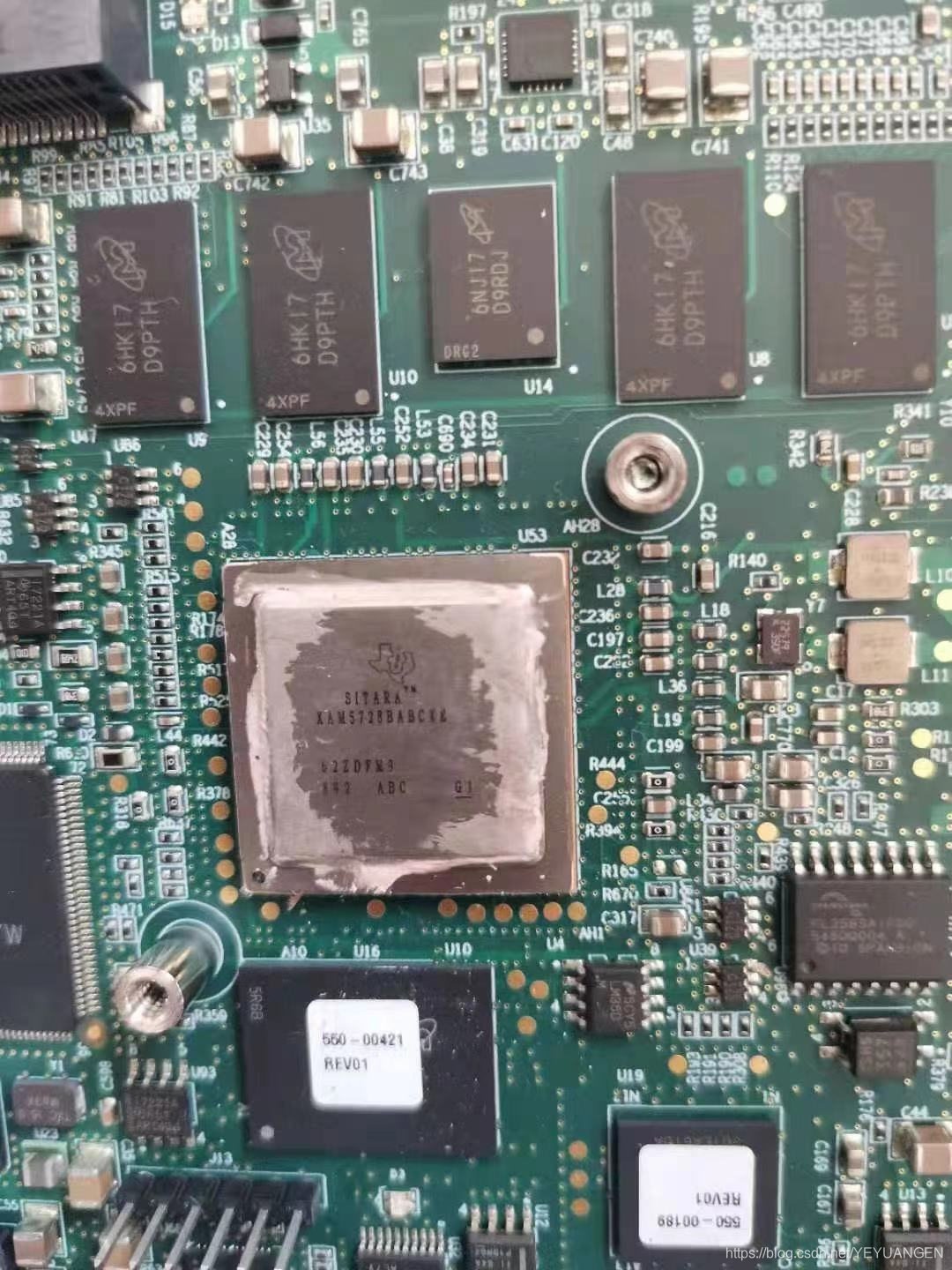
采用TI AM5728多核异构处理器设计的核心板
1、双ARM Cortex-A15+双C66xVLIW浮点 DSP C66X异构混合处理器
➢ 同时具有 2x Cortex-A15@1.5GHz、2x C66x DSP@750MHz、2x Cortex-M4、2x PRU
➢ 采用工业级精密BTB 连接器进行连接,保证信号完整性,安装拆卸方便稳定可靠
➢ 最大支持 6 路视频输入,3路视频输出
➢ 最大支持 8 路 McASP
➢ 最大支持 2 路 CAN 接口
➢ 最大支持 10 路 UART
➢ 最大支持 3 路 LCD
➢ 最大支持 4 路 SPI
➢ 最大支持 3 路 MMC
➢ 最大支持 5 路 I2C
➢ 最大支持 2 路千兆网口
➢ 支持 1 路 SATA-2 接口
➢ 支持 1 路 USB 3.0
➢ 支持 2路 USB 2.0
➢ 支持 1 路 HDMI
➢ 支持 1 路 PCIe 3.0, 支持 1*2-lanes 或 2*1-lane 两种模式
➢ 支持 Linux 4.14.67、DSP RTOS 系统,支持实时 RT-Linux 系统
➢ 工作温度范围:-40℃~85℃(工业级)
2、多核异构开发平台
提供多种命令行与QT端开发例程,提供OpenCV、OpenCL、OpenGL开发历程、提供DSP、PRU环境搭建与开发历程
3、功能强大的DSP
信迈AM5728开发板集成实时计算的C66X数字信号处理器DSP,主频750MHZ,广泛应用在音频处理、视频处理、复杂数据算法处理等领域, 信迈提供OpenCV视觉库集成了OPENCV+DSP的边缘检测算法、人脸识别、OPENCV+OPENCL+OPENGL等参考DEMO,方便客户快速开发。
4、PRU可编程实时单元
开发板配备2个双核PRU-ICSS支持EtherCAT、EtherNET/IP、POWERLINK、PROFIBUS、PROFINET RT/IRT、SERCOS III,可实时现场总线协议和其他工业通信,能够为开发人员提供工业应用所必需的低时延和实时控制功能,PRU的实时性可以到ns级别。
5、丰富的多媒体功能
开发板集成SGX5443-D和GC320 2-D图形加速器适用于高级图形用户界面,同时Cortex-M4图形处理单元IPU2专用于IVA图像视频硬编解,支持H264、MPEG4等多种编码格式视频硬件解码播放,支持多路视频同时解码播放,多路同时解码总和能达到1080P 60帧;支持MJPEG图像硬件编解码;VPE支持硬件图像、视频缩放,颜色空间转换。
6、丰富的通讯接口
■ 双千兆以太网通信接口,支持Ethernet/IP 和 PROFINET 协议;
■ 支持 RS232/RS485总线与PLC、计算机等系统连接;
■ 支持板载 WiFi&Bluetooth 一体模块以及4G通讯。
达到的技术性能指标
在物流业应用中,物品从揽件到分拔中心、从分拔中心到派件过程中的多个环节均需要对单据上的条码进行扫描。
而本文的读码器无须人工操作,通过在自动化流水线上安装固定式读码器,实现对条码的自动定位和解码。 基于固定式图像型智能相机,整个流程的效率、准确率都得到了大大的提高和保证。
参考方案为信迈的XM5728-IDK-V3开发板。
![[分享]亚马逊AGV Kiva机器人拆解分析](https://i-blog.csdnimg.cn/blog_migrate/cfb916c4f543c199407b5b525d8b5161.jpeg)
系统架构和机械结构
从外面看,Kiva机器人外壳的每一侧都有红外传感阵列,以及气动保险杠,用于检测和缓冲碰撞。外壳上还有充电接口和一系列状态指示灯。
每一台Kiva机器人有三个独立的自由度:两个驱动轮,加上一个用于起重的旋转电机。起重电机转动时,两个驱动轮反方向旋转,结果是托盘相对于地面没有旋转,只在滚珠丝杠的作用下升高。相比于传统的大负载直线驱动方案比如液压、剪式升降台,Kiva的这种利用轮子的结构显然更加简单可靠。

起重结构托盘的顶部是一些厚实的X形铝铸件,这些铸件全部使用319号通用铝。每个铝铸件上还有二次精密加工出来的参考面和螺纹孔。这种工艺在包括汽车发动机和液压泵等设备中大量使用。

左:打开外壳后看到的Kiva内侧结构。图中可以看到外壳上的红外阵列,无线模块,起重结构和起重电机。右:Kiva俯视图。可以看到起重结构和电池。
每一个红外传感器都配有独立的滤波芯片,通过串口总线通讯。在图中你可以看到升降模块使用的电机和巨大齿轮。在机器人靠近底部的位置,安装有四块铅蓄电池。
外壳
橘黄色的流线型塑料外壳采用ABS材料真空塑形。在其上有大量二次加工的结构。用于造Kiva的真空塑形机和数控铣想必都体积巨大。这个版本的Kiva外壳既复杂又造价高昂,新版本估计会采用全注塑结构。

碰撞传感器
对于像Kiva这种大块的流线型外壳而言,做传统的一体化碰撞传感器是非常困难的。Kiva的工程师们找到了一个非常聪明的低成本解决方案:用乙烯/橡胶管充气,加上一个简单的气压传感器。一旦检测到管内气压变化,机器人就立即停止所有运动。 上图右边的黑盒子用于检测压力信号和所有红外传感器的信号,以简化与主控制器的协议和接线。

升降机构
齿轮箱,升降电机和大口径滚珠丝杠。升降机构使用了一个定制的滚珠丝杠,经由一个标准尼龙齿轮和电机连接。升降机使用的电机和两个驱动轮电机是同一款Pittman电机。它能够输出约3N*M的扭矩和1KW的堵转功率。电机输出轴经过25:1的日本Brother齿轮箱,能在72rpm输出46N*M的扭矩。这款齿轮箱单价高达1000美金,想必大量订货的话会便宜不少。

底盘和驱动轮
把升降结构拆下来后,我们可以把机器人翻个底朝天来看一看其底盘上的驱动装置。两个电机以及其齿轮箱和升降电机相同,两个定制的轮子组成可以原地旋转的差分结构。
三个砂铸铝部件构成了机器人底盘的大部分。它们由简单的U形夹销连接,形成一个简单的被动双悬挂结构。 同样,这些铝件采用319合金,以及先铸造再精加工的工艺。注意下图中底盘上加工出来的散热结构,其背面装着的正是电机驱动器的巨型MOSFET。这种结构可以自然地利用底盘来以获得最大的散热效率。
连接悬挂结构的U型夹销,底盘上的散热片。

电子元件
要让Kiva机器人身上这三个大功率电机和一身的传感器长时间可靠地工作,电子设备的设计是相当重要的一环。
电池模块
电池的线束,充电口(顶视图和侧视图)整个系统的能源来自于四个串联的12V,28Ah 铅蓄电池。四个电池中的两个还安装了热电偶以确保它们不会过热。当电量过低时,机器人会自动脱离中央控制器的指令,并自行回到充电站充电。充电站的设计留有很大空间裕度,保证机器人能够正常充上电。

摄像头和成像模块
朝上和往下看的摄像头。两个都安装于滚珠丝杠内部。置于升降机构内部的是Kiva系统的关键设备之一:定制的双摄像机成像模块。 一个摄像头向下看地面以识别仓库地板上的2D条形码, 另一个向上看货架的底部。每个摄像头都配备6个红色LED用于照明。 夹在两个摄像机之间的是图像处理模块,其核心是ADI ADSP-BF548 Blackfin多媒体处理器,通过高速串口获取数据,进行数据矩阵检测。
主板和子板

统筹全局的是上图中的主逻辑模块。电机驱动板由电池的48V DC供电;逻辑元件部分全部使用一路单独滤波的电源。三相直流无刷电机(BLDC)的驱动板也是完全定制的,由一块莱迪思的LFXP6C FPGA(隐藏在主板下)驱动。
三个电机驱动都配有电流传感器(注:所以很可能是FOC控制),编码器以及6个全桥MOSFET(通过机箱冷却)。安装FPGA的子板承担了协调无线模块、成像单元、紧急制动、连接红外/压力传感器、电源管理和电机驱动器的功能,大大减轻了主板的压力。MCU是32位,400MHz 的Freescale MPC5123,很可能运行的是PowerPC Linux。 两个以太网端口连接到无线模块和固件存储,它们由一个Mircel KSZ8993切换。整个机器人唯一一个现成的电子元件是通信模块:Soekris Engineering Net4526双天线路由器,运行着单个Winstron NeWeb CM9无线模块,通过以太网和主板连接。

堪称神器的升降模块

这代Kiva有许多处设计都非常精巧,而其中最出彩的莫过于升降模块。它必须能在一千磅(约半吨)的压力下完成升降,并全程与地面保持完美的平行——这是滚珠丝杠结构的理想任务。通常市面上见到的滚珠丝杠都是实心的,最粗也不过五个厘米,而Kiva定制的这款外径达到了28厘米,而且是空心,内螺纹结构。丝杠的两个壳体轴承都是铝质,同底盘一样都是需要二次加工的铸件。这两个部件都进行了表面氧化处理,这为轴承提供了很好的润滑和防锈能力。内壳是固定的,相当于一个球形螺母,其外侧有注塑成型的环状结构,用来约束滚珠;外壳在旋转时内侧与滚珠接触,外侧与升降电机通过齿轮连接。
根据工艺复杂度,整个升降结构的成本估计在1000美金左右。
Kiva Systems是少数几家能够将复杂的硬件和软件巧妙地集成到一个无缝解决方案中的公司之一,并且已经建立了一个能够极大地改变我们的购买,销售和生活方式的系统。很明显, Kiva Systems公司里养着一帮非常强大的硬件工程师,这可能是亚马逊在2012为收购Kiva抛出7.75亿美元天价的一个重要原因。这篇文章只讨论了机器人本体,但要注意这只是整个Kiva解决方案中一个很小的(但也超屌的)一部分。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









