









 文章介绍了针对光刻机双工件台运动控制系统的复杂控制需求,提出了一种结合DSP的高速浮点运算和FPGA的并行处理能力,利用光纤通信解决长距离传输和电磁干扰问题的解决方案。系统包括核心运算控制单元和远程传感伺服控制单元,支持高速数据采集与伺服接口,实现了高速光纤通信和EnDat串行通信功能。
文章介绍了针对光刻机双工件台运动控制系统的复杂控制需求,提出了一种结合DSP的高速浮点运算和FPGA的并行处理能力,利用光纤通信解决长距离传输和电磁干扰问题的解决方案。系统包括核心运算控制单元和远程传感伺服控制单元,支持高速数据采集与伺服接口,实现了高速光纤通信和EnDat串行通信功能。
光刻机双工件台运动控制系统,控制任务相当复杂,要求极高的速度和精度,且设
备体积庞大,各传感器执行器空间距离较远,线缆众多现场电磁干扰严重。
为满足控制系统要求,本文利用 DSP 的高速浮点运算能力、FPGA 强大的并行处理
能力及光纤通信传输距离远、抗干扰能力强的特点,提出了一种基于 FPGA+DSP+高速
光纤传输的数据采集与伺服接口系统解决方案。整个系统分为核心运算控制单元和远程
传感伺服控制单元这两个部分。
根据系统整体方案进行了系统硬件电路设计,包括 FPGA 系统电路、DSP 系统电路、
光纤串行通信电路、EnDat 电路、模数/数模转换电路、隔离数字 IO 电路,并设计了系
统供电电源方案。利用 Top_Down 设计方法,将 FPGA 软件驱动程序划分为光纤通信内
核、数/模转换 DA 控制器、模/数转换 AD 控制器、EnDat 协议内核、增量式位置值获取
控制器等各子模块,然后分别对各子模块进行了详细的逻辑驱动开发。
2 基于光纤传输的高速数据采集与伺服接口系统整体方案
2.1 系统需求分析
本课题基于光纤传输的高速数据采集与伺服接口系统作为整个双工件台运动控制
系统中最靠近外部各执行器、传感器的部分,其性能的好坏将直接影响整个控制系统的
质量。双工件台运动控制系统,由于设备体积庞大,各外部传感器、执行器之间在空间
上分布在较远的距离,且各种线缆众多,现场电磁干扰不容忽视;为保证控制质量,伺
服周期很短,因此数据传输速率要求就很高,传统的控制系统传输方案显然不能满足;
系统具体要求如下:
· 单一核心运算处理单元浮点运算速度不低于 2000MIPS;
· 伺服周期可以达到 150us,且每个伺服周期内最多传输 2K 字节的数据(包括上
行数据传输和下行数据传输);
· 核心运算系统与远程系统双方均需提供 1K Byte 的接收及发送缓存区;
· 数据采用光纤介质进行传输,数据速率不低于 1Gbps;
· 数据传输接收方在收到有效数据后需回复应答,告知发送方数据已有效接收;
· 提供 13 位精度的模拟电压信号输出(差分输出,-10V~+10V 全范围);
· 提供 13 位精度、采样率不低于 200K 的模/数转换输入接口(单端输入、差分输
入均可,-10V~+10V 全范围);
· 提供 500K 开关速度光电隔离数字信号输出;
· 提供 500K 开关速度光电隔离数字传感器信号输入接口;
· 支持绝对式 EnDat 双向串行通信协议(EnDat2.1 和 EnDat2.2 均支持,不要求实
现协议的全部功能);
· 支持增量式光栅传感器位置值获取功能(信号四倍频前至少支持 10Mhz);
2.2 系统整体架构
根据基于光纤传输的高速数据采集与伺服接口系统性能需求分析,本课题采用德州
仪器 TI 公司的 C6000 系列 DSP 作为核心运算处理的基本单元, ALTERA 公司的 FPGA
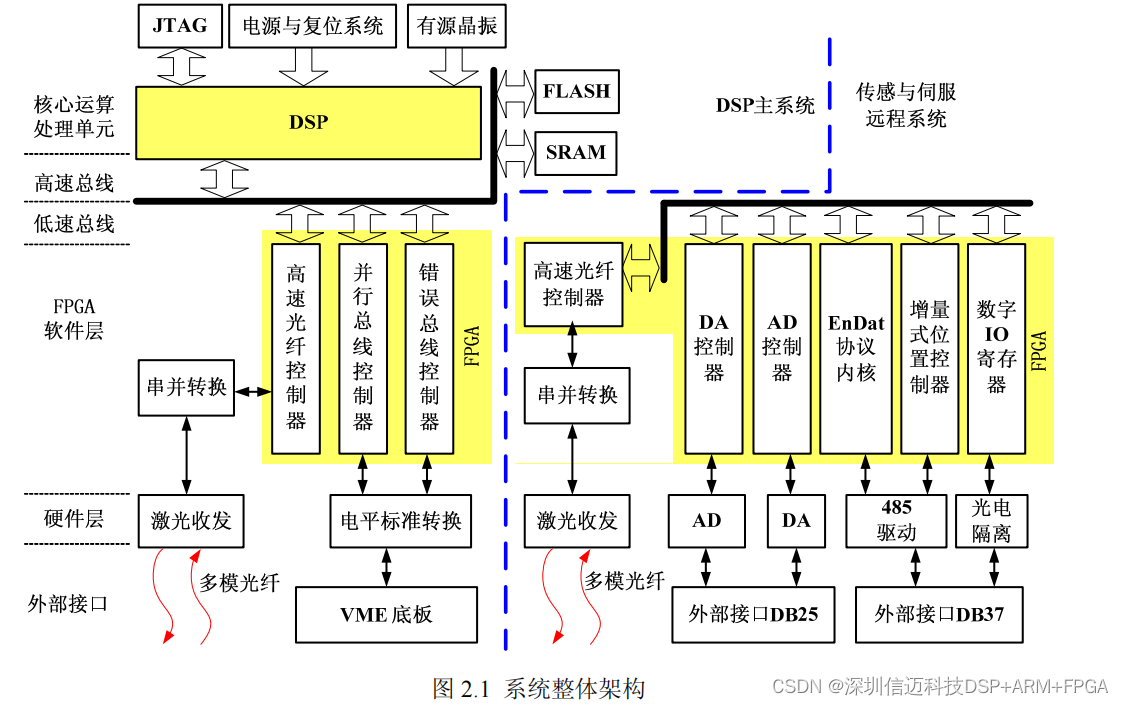
作为各传感器、执行器外设控制器的实现手段,SC-SC 接口多模光纤作为可靠的远距离
数据信道传输介质,提供高精度的模拟电压指令及光电隔离数字指令输出接口,具有高
速高精度的模拟传感器及光电隔离数字传感器输入接口,支持超精密绝对式 EnDat 位置
编码器及精密增量式光栅编码器接口,系统整体架构如图 2.1 所示。
核心运算处理单元 DSP 主系统和传感与伺服远程系统之间采用多模光纤介质进行
数据传输,通信带宽高达 1.25Gbps,同时采用用户自定义的光纤传输协议,去除了大量
的通信额外开销,优化了延时性能,伺服周期可小到 150us。
本课题中,存在着上行和下行两个特征明显的数据流向。下行数据流程是核心运算
处理单元 DSP 主系统通过光纤将运动控制指令数据传入远程伺服与传感系统,系统接
收到指令数据后立即转换为模拟电压指令及光电隔离数字指令输出到外部各执行器件;
上行数据流程是远程伺服与传感系统在接到主系统请求后及时将模拟传感器及光电隔
离数字传感器、绝对式 EnDat 位置编码器及精密增量式光栅编码器等各外部传感器数据
传回核心运算处理单元 DSP 主系统,供下一个伺服周期控制计算使用。
为了极大的提高运算速度,减小伺服周期,目前情况下,任何单一的处理器都无法
满足性能需求分析中提出的指标,因此,本课题采用了 VME 机箱及并行总线控制器实
现多处理器并行处理机制,由于该部分不属于本课题的范围,在此不再多加介绍。
2.3 系统总体方案
系统需求分析决定了系统的整体架构,从图 2.1 系统整体架构中可以看出,整个系
统功能复杂,功能模块众多,但存在两个明显的系统关键环节,即高速光纤通信和 EnDat
双向串行通信两个子模块,下面就两个关键环节进行详细介绍。
2.3.1 高速光纤通信方案选择
目前阶段,光纤传输通信方案主流有两种,一种是采用分立式器件分别构建光发射
及光接收电路的方案,另外一种是使用专用芯片及模块将发射接收集成化的方案。下面
就两种方案的优缺点进行详细介绍。
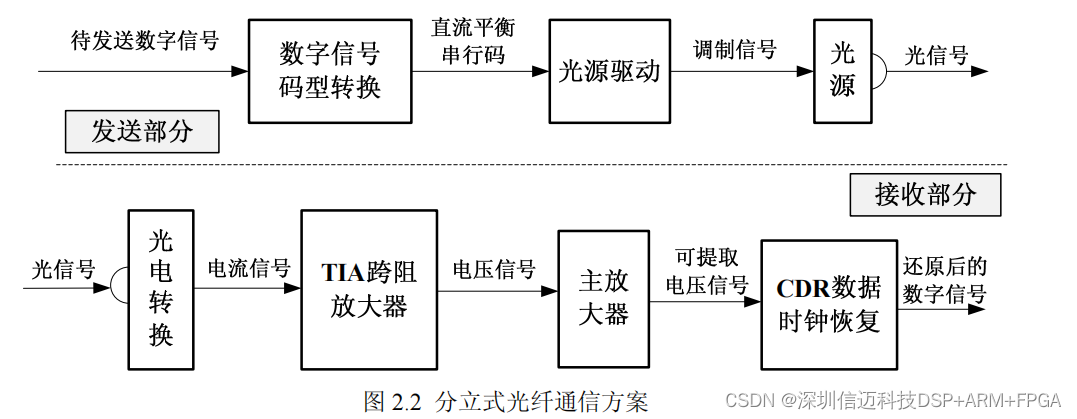
方案一:分立式构建方案
如图 2.2 所示为分立式构建方案的结构组成图,从中可以看出发送部分共三个模块
构成,它们分别是数字信号码型转化电路、光源驱动电路和光信号调制电路。其中数字
信号码型转化电路主要完成数字信号的平衡化编码,以使传输的串行信道直流分量为
零,可以通过现场可编程逻辑门阵列 FPGA 来实现;光源驱动电路主要完成光信号的调
制以便直接驱动光源,通常可采用AXIM 公司MAX3766光源驱动器(1.25G)、MAX3869
光源驱动器(2.5G)等;光源电路完成电信号到光信号的转换,普遍使用发光器件,目
前最常用的有发光二极管和激光器两种器件类型[5-9]。
接收部分共四个模块构成,它们分别是光电检测电路、跨阻放大器电路、主放大器
电路和数据时钟恢复电路 CDR。光电检测电路完成将光信号转化为电脉冲信号,目前
阶段,APD 雪崩二极管和 PIN 光电二极管等光探测器件被广泛应用。跨阻放大器完成
微弱的电流信号到强度足够的电压信号的放大和调理。主放大器的增益要能够自动调
节,使得光电检测器件输出的电流信号出现波动时能够自动调节增益,使得输出的可提
取电压信号幅值保持稳定,文献[20]中使用 MAXIM3269 与 AXIM3267 联合实现 2.5G
bit/s 的微弱电流信号放大功能,值得借鉴。数据时钟恢复电路 CDR 完成串行数据流到
并行数据的提取和恢复隐藏在其中的时钟,可以使用现场可编程逻辑门阵列 FPGA 来实
现。
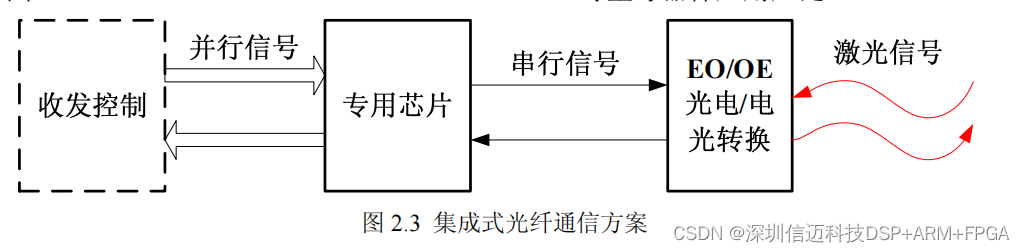
方案二:集成化构建方案
如图 2.3 所示为集成化构建方案的结构组成图,从中可以看出共三个模块构成,它
们分别是收发控制部分、专用芯片部分及光电转换部分。目前光纤通信技术已经得到广
泛应用,通信方案的构建方式正在向着模块化和集成化的方向发展[8]。其中,光电转换
部分集成了光发射电路及光探测电路,并提供发送和接收两个接口,常用的接口类型包
括 SC 和 FC 两种。专用芯片部分集成了数据并行到串行的转换、数据和时钟提取 CDR、
平衡编码解码等功能,并提供发送参考时钟和恢复时钟引脚和并行接口总线给其余模
块。
文献[9,11]中都是采用集成化构建方案,在这些方案中,采用专用的数据转换芯片
和光电转换芯片来实现光纤通信电路的构建。光电转换模块主要是 Agilent 公司的 HFBR
系列, HFBR-53A3VEM、HFBR-53A3VFM 等型号产品应用广泛。串并转换、时钟提
取等专用芯片模块主要是 CYPRESS 公司的 CY7B、CY7C 系列,TI 公司的 TLK 系列,
其中 CY7B923、CY7B933、CY7C924、TLK1221 等型号器件应用广泛。
两种方案优缺点比较:
分立式构建方案比较灵活,维护以及升级方便,但是显然的缺点就是整体结构复杂,
需要使用大量元件来实现,因此会造成光纤通信整体的体积庞大,与整个系统相比,显
然有头重脚轻的毛病既不现实也不合适,同时需要对光纤的传输细节有清晰的认知,测
试、开发周期较长;而集成化构建方案总体结构简单明晰、且各子部分可靠性非常高,
设计者只需关注各个部分的连接即可,开发周期短,调试方便。因此本课题采用集成化
构建方案来完成核心运算处理单元 DSP 主系统与远程传感伺服系统的数据传输任务。
2.3.2 EnDat 双向串行通信方案选择
目前阶段,EnDat 双向串行通信方案主流有两种,一种是直接采用 MAZeT 公司提
供的宏模块,另外一种是根据 EnDat 协议规范自主编写控制器内核实现其功能。文献[47]
采用了 DSP 直接实现 EnDat 接口通信的方法,值得借鉴。
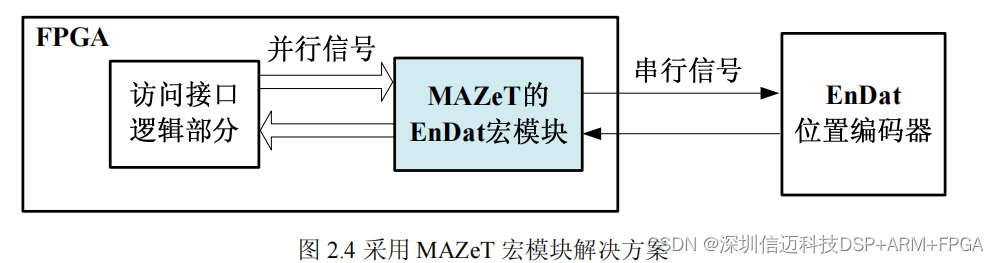
方案一:采用 MAZeT 宏模块
海德汉第三方合作伙伴 MAZeT 针对 Xilinx 公司 Virtex 和 Spartan 系列及 Altera 公
司 Acex 和 Cycolne 系列 FPGA 专门提供了 EnDat 协议的宏模块[11],该宏模块实现了
EnDat 协议的全部功能,支持 EnDat2.2 版本的所有模式指令访问,并向下兼容 EnDat2.1
版本,同时该宏模块提供了 6 位地址总线、16 位数据总线、读使能、写使能、中断触发
等访问接口,使得用户可以像访问 SRAM 一样简单的就能实现 EnDat 的所有功能,该
解决方案结构如图 2.4 所示。
方案二:自主编写 EnDat 实现
图 2.5 是自主编写 EnDat 时序解决方案的结构组成,从中可以看出与采用 MAZeT
宏模块的解决方案相类似,区别仅仅是两者来源不同,第一种方案采用官方的宏模块实
现,第二中方案则利用硬件描述语言 Verilog HDL 自主编写 EnDat 时序来实现其功能。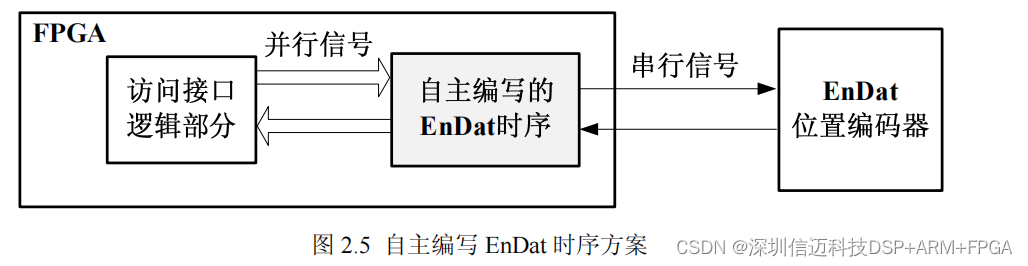
两种方案优缺点比较:
采用 MAZeT 宏模块的解决方案,把复杂的 EnDat 时序转换成了比较简单的时序,
因而减小了开发难度,缩短了开发周期,因而该方案具有较好的稳定性和可靠性;但同
时缺点也非常明显,首先 MAZeT 宏模块需要购买,价格相对昂贵,因此如果不需要大
批量生产,一般都不会采取这种方案,另外,MAZeT 宏模块提供了完整的功能,因而
会占用大量的 FPGA 逻辑资源,而系统需求分析中指出全部的功能实现是不必要的,且
系统整体结构还包括了大量其余外设的控制器,因而本课题采用自主编写 EnDat 时序的
解决方案,只需编程实现 EnDat 的部分功能,因而节约了开发时间,降低了成本,同时
增加了设计的灵活性。
信迈提供DSP+FPGA半导体运动台方案。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









