






1 前言
🔥 这两年开始毕业设计和毕业答辩的要求和难度不断提升,传统的毕设题目缺少创新和亮点,往往达不到毕业答辩的要求,这两年不断有学弟学妹告诉学长自己做的项目系统达不到老师的要求。
为了大家能够顺利以及最少的精力通过毕设,学长分享优质毕业设计项目,今天要分享的是
🚩 基于生成对抗网络的照片上色动态算法设计与实现
🥇学长这里给一个题目综合评分(每项满分5分)
- 难度系数:3分
- 工作量:3分
- 创新点:4分
🧿 选题指导, 项目分享:见文末

1 课题背景
随着科技的发展,现在已经没有朋友会再去买胶卷拍照片了。不过对于很多70、80后来说,他们家中还保存着大量之前拍摄的胶卷和老照片。这些老照片是一个时代的记忆,记录着我们生活中的点点滴滴。不过时代发展了,这些老照片的保存和浏览也应该与时俱进。在本期文章中,我们就介绍如何将这些老照片转化为数字照片,更方便大家在电脑或者手机上浏览、保存和回忆。
本项目中我们利用生成对抗网络-GAN和图像动作驱动-First Order Motion Model来给老照片上色并使它动起来。
2 GAN(生成对抗网络)
2.1 简介
**GANs(Generative adversarial networks,对抗式生成网络)**可以把这三个单词拆分理解。
- Generative:生成式模型
- Adversarial:采取对抗的策略
- Networks:网络(不一定是深度学习)
模型通过框架中(至少)两个模块:生成模型(Generative Model)和判别模型(Discriminative Model)的互相博弈学习产生相当好的输出。原始 GAN 理论中,并不要求 G 和 D 都是神经网络,只需要是能拟合相应生成和判别的函数即可。但实用中一般均使用深度神经网络作为 G 和 D 。

2.2 基本原理
这里介绍的是原生的GAN算法,虽然有一些不足,但提供了一种生成对抗性的新思路。放心,我这篇博文不会堆一大堆公式,只会提供一种理解思路。
理解GAN的两大护法G和D,生成对抗网络(GAN)由2个重要的部分构成:
- 生成器(Generator):通过机器生成数据(大部分情况下是图像),负责凭空捏造数据出来,目的是“骗过”判别器
- 判别器(Discriminator):判断这张图像是真实的还是机器生成的,负责判断数据是不是真数据,目的是找出生成器做的“假数据”

这样可以简单的看作是两个网络的博弈过程。在最原始的GAN论文里面,G和D都是两个多层感知机网络。首先,注意一点,GAN操作的数据不一定非得是图像数据,不过为了更方便解释,用图像数据为例解释以下GAN:

tensorflow实现
import tensorflow as tf
def load_dataset(mnist_size, mnist_batch_size, cifar_size, cifar_batch_size,):
""" load mnist and cifar10 dataset to shuffle.
Args:
mnist_size: mnist dataset size.
mnist_batch_size: every train dataset of mnist.
cifar_size: cifar10 dataset size.
cifar_batch_size: every train dataset of cifar10.
Returns:
mnist dataset, cifar10 dataset
"""
# load mnist data
(mnist_train_images, mnist_train_labels), (_, _) = tf.keras.datasets.mnist.load_data()
# load cifar10 data
(cifar_train_images, cifar_train_labels), (_, _) = tf.keras.datasets.cifar10.load_data()
mnist_train_images = mnist_train_images.reshape(mnist_train_images.shape[0], 28, 28, 1).astype('float32')
mnist_train_images = (mnist_train_images - 127.5) / 127.5 # Normalize the images to [-1, 1]
cifar_train_images = cifar_train_images.reshape(cifar_train_images.shape[0], 32, 32, 3).astype('float32')
cifar_train_images = (cifar_train_images - 127.5) / 127.5 # Normalize the images to [-1, 1]
# Batch and shuffle the data
mnist_train_dataset = tf.data.Dataset.from_tensor_slices(mnist_train_images)
mnist_train_dataset = mnist_train_dataset.shuffle(mnist_size).batch(mnist_batch_size)
cifar_train_dataset = tf.data.Dataset.from_tensor_slices(cifar_train_images)
cifar_train_dataset = cifar_train_dataset.shuffle(cifar_size).batch(cifar_batch_size)
return mnist_train_dataset, cifar_train_dataset
3 DeOldify 框架
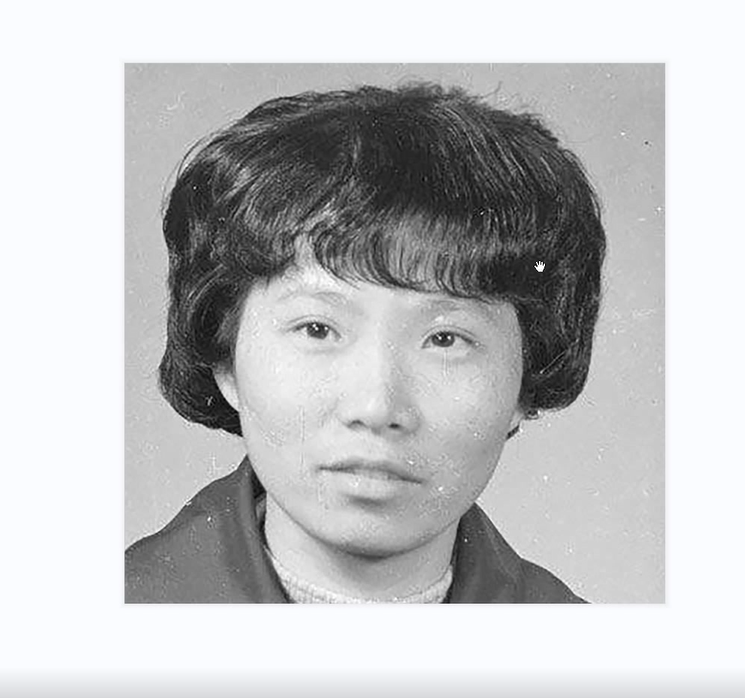
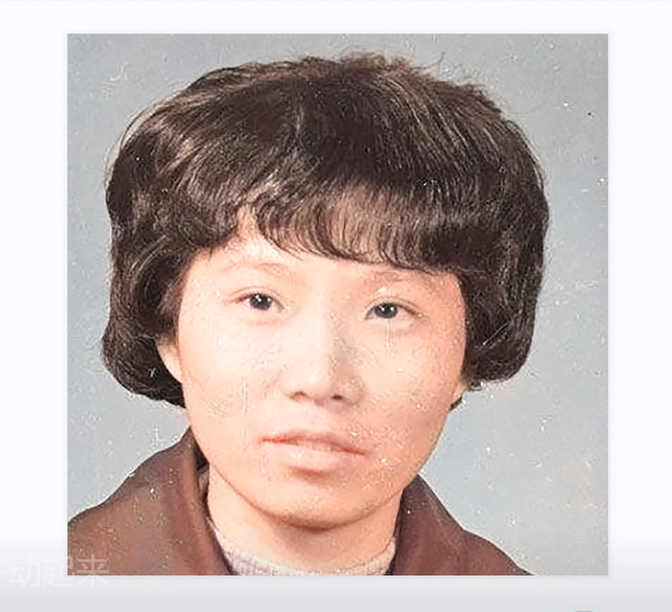
本项目中用到的上色就用到了DeOldify 框架,DeOldify 创建的目的是为了给黑白照片上色,但让人惊艳的是它除了能处理图片外,也可以处理视频;
DeOldify 的核心网络框架是 GAN ,对比以前上色技术有以下几个特点:
- 1,老照片中的伪影在上色过程中会被消除;
- 2,老照片的人脸部位来说,处理后皮肤会变得更光滑;
- 3,呈现更详细、真实的渲染效果;
实现过程
准备好权重文件

相关代码
#部分代码
def deoldify(self,img,render_factor=35):
"""
风格化
"""
# 转换通道
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
pil_img = Image.fromarray(img)
# 渲染彩图
color_img = self.deoldify_model.filter(
pil_img, pil_img, render_factor=render_factor,post_process=True
)
color_img = np.asarray(color_img)
color_img = cv2.cvtColor(color_img, cv2.COLOR_RGB2BGR)
# 转为numpy图
print('deoldify 转换成功')
return np.asarray(color_img)
实现效果:
4 First Order Motion Model
First Order Motion model的任务是image animation,给定一张源图片,给定一个驱动视频,生成一段视频,其中主角是源图片,动作是驱动视频中的动作,源图像通常包含一个主体,驱动视频包含一系列动作。
通俗来说,First Order Motion能够将给定的驱动视频中的人物A的动作迁移至给定的源图片中的人物B身上,生成全新的以人物B的脸演绎人物A的表情的视频。
以人脸表情迁移为例,给定一个源人物,给定一个驱动视频,可以生成一个视频,其中主体是源人物,视频中源人物的表情是由驱动视频中的表情所确定的。通常情况下,我们需要对源人物进行人脸关键点标注、进行表情迁移的模型训练。
基本框架
first-order 的算法框架如下图所示,主要包括三个部分的网络,keyporint detector 检测图像中的关键点,以及每个关键点对应的jaccobian矩阵;dense motion network 基于前面的结果生成最终的transform map 以及occulation map;使用transform map 和 occulation map 对编码后的source feature 做变换和mask处理,再decoder 生成出最终的结果。

本项目相关代码
def FOM_video(self,driving_video,source_image,result_video):
# 读取图片
source_image = imageio.imread(source_image)
# 读取视频
reader = imageio.get_reader(driving_video)
fps = reader.get_meta_data()['fps']
driving_video = []
try:
for im in reader:
driving_video.append(im)
except RuntimeError:
pass
reader.close()
# 预处理
source_image = resize(source_image, (255, 255))[..., :3]
driving_video = [resize(frame, (255, 255))[..., :3] for frame in driving_video]
# 推理
predictions = self.make_animation(source_image, driving_video, self.fom_generator, self.fom_kp_detector, relative=True, adapt_movement_scale=True, cpu=True)
# 保存
imageio.mimsave(result_video, [img_as_ubyte(frame) for frame in predictions], fps=fps)
driving_video = './images/test2.mp4'
source_image = './images/out2.jpg'
result_video = './putput/result.mp4'
# 图像动起来
gan.FOM_video(driving_video, source_image,result_video)
运行如下命令,实现表情动作迁移。其中,各参数的具体使用说明如下:
- driving_video: 驱动视频,视频中人物的表情动作作为待迁移的对象。本项目中驱动视频路径为 “work/driving_video.MOV”,大家可以上传自己准备的视频,更换
driving_video参数对应的路径; - source_image: 原始图片,视频中人物的表情动作将迁移到该原始图片中的人物上。这里原始图片路径使用 “work/image.jpeg”,大家可以使用自己准备的图片,更换
source_image参数对应的路径; - relative: 指示程序中使用视频和图片中人物关键点的相对坐标还是绝对坐标,建议使用相对坐标,若使用绝对坐标,会导致迁移后人物扭曲变形;
- adapt_scale: 根据关键点凸包自适应运动尺度;
- ratio: 针对多人脸,将框出来的人脸贴回原图时的区域占宽高的比例,默认为0.4,范围为【0.4,0.5】
命令运行成功后会在ouput文件夹生成名为result.mp4的视频文件,该文件即为动作迁移后的视频。
实现效果:
,若使用绝对坐标,会导致迁移后人物扭曲变形;
- adapt_scale: 根据关键点凸包自适应运动尺度;
- ratio: 针对多人脸,将框出来的人脸贴回原图时的区域占宽高的比例,默认为0.4,范围为【0.4,0.5】
命令运行成功后会在ouput文件夹生成名为result.mp4的视频文件,该文件即为动作迁移后的视频。
实现效果:
**毕设帮助, 选题指导, 项目分享: ** https://gitee.com/yaa-dc/warehouse-1/blob/master/python/README.md















 148
148











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









