






MVDR波束形成具有较高SNR,但易受校准误差、导向矢量误差、相关矩阵估计误差等各种失配的影响,造成SOI损失。目前有不少研究致力于增加MVDR稳定性,基于个人有限的理解,现将这些论文整理成笔记。
[1] Robust Adaptive Beamforming Based on Steering Vector Estimation With as Little as Possible Prior Information
最优导向矢量可通过最大功率估计
其中
是
的补集,
是SOI可能处在的方位,这里的重点是约束
要求了导向矢量
在
中,而不会收敛到任何与干扰方向相关的导向矢量的线性组合中。上述QCQP问题转化成SDP问题求解
论文中的仿真结果

算法复杂度为
[2] New Designs on MVDR Robust Adaptive Beamforming Based on Optimal Steering Vector Estimation
基于[1]所提出优化问题,作者提出增加少量的先验信息换取波束形成效果的提升,优化问题变为如下
第二个约束相当于放宽了优化问题的可行域,取而代之是增加最优解与目标导向矢量相似性的约束,即这里的第三个约束,定义的是广义相似性,论文里的仿真取最简洁的情况
,即
,约束条件描述的空间变为球体。这里增加的先验信息可以允许对目标导向矢量较粗略的估计,实际论文取
是可以接受的,并不违背[1]所提出方法的初衷,即从最少的先验信息中得到最优导向矢量估计。麻烦的是这里的优化问题不是一个凸优化问题,实际上在
情况下,这里的QCQP问题转化成SDP问题后,可以得到全局最优解,但对于任意的
则不能保证得到全局最优解。论文有大篇幅证明这里的QCQP等价于转化后的SDP,具体细节不在这里赘述。
作者另提出一个基准 ,将上面优化问题约束改成
改成
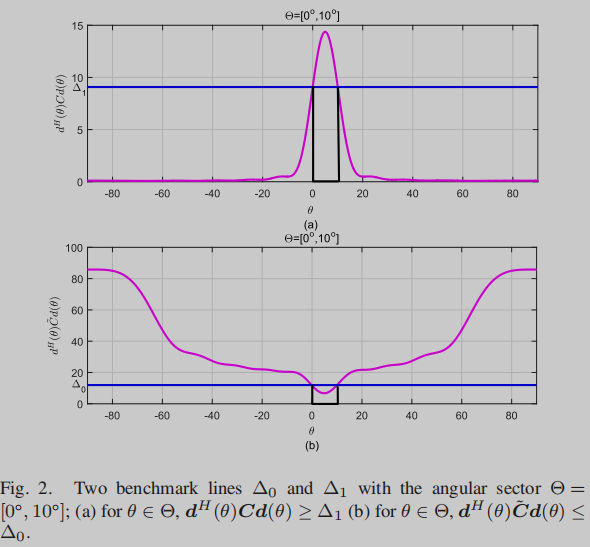
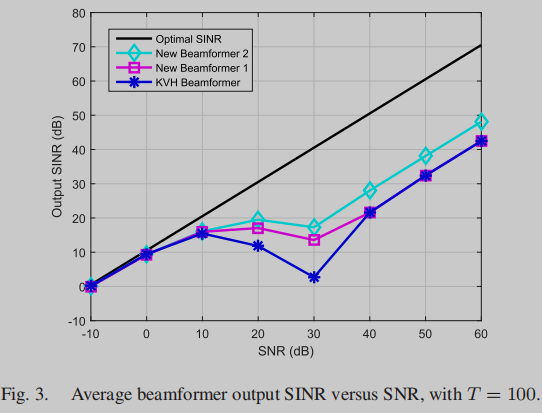
实际上利用基准 和
都能有效地将导向矢量约束在期望导向区域的附近,远离干扰方向导向矢量的线性组合。对比[1]的优化方法(KVH beamformer),作者提出的两种方法略优。
[3] Performance of DMI and Eigenspace-Based Beamformers
这篇介绍的算是特征空间波束成形的基础,假定有个干扰源,相关矩阵
其中特征值,特征空间
等价于信号干扰子空间,特征空间
则形成噪声子空间,利用
,可以将MVDR的加权改写成
,其中
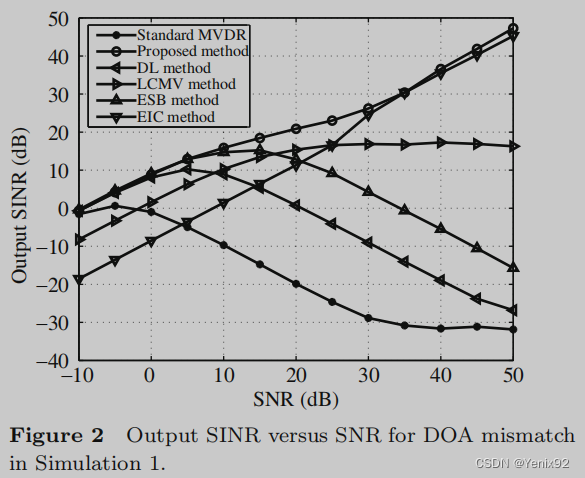
由于原论文没有考虑导向矢量失配,这里自己仿真了一下
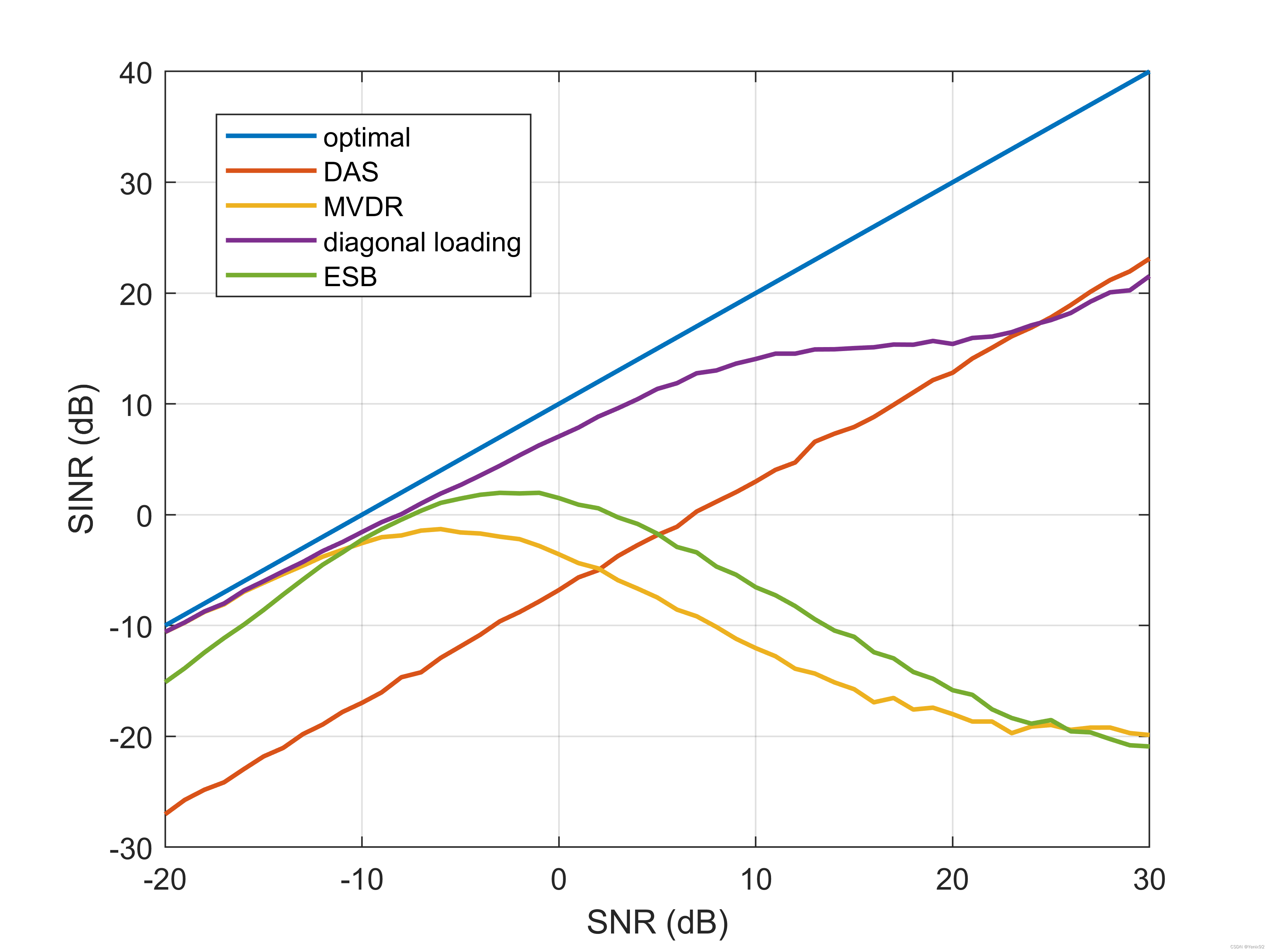
导向矢量失配使在高输入SNR的情况下,MVDR的效果急剧下降。虽然这里提出的特征空间算法对比MVDR有一定提升,但没有解决导向矢量失配的问题,在高输入SNR的情况下并不如简单的对角加载。另外,尽管论文声称ESB在过度估计干扰数量的情况下仍有相当效果,但实际测试中干扰数量的估计对算法效果有较大影响。
[4] Robust MVDR Beamforming Using the DOA Matrix Decomposition
论文讨论的方法基本上是基于ESPRIT的源定位方法,这里先复习一下ESPRIT[5]
考虑两个子阵组成的阵列
假设有个声源,
,
定义了
个到达源的旋转不变性,很多地方在介绍ESPRIT的时候都用了ULA作为例子,其实线性阵列不是ESPRIT的硬性要求,但阵列必须可分为两个对源旋转不变的子阵,
在这里定义了两个子阵的间距。也就是说简单的平移保留旋转不变性,但对阵列做旋转或对称操作就不保证旋转不变性,那最简单的方法就是先设计子阵1,再平移得到子阵2。整个阵列输出为
对相关矩阵做特征分解
由于,必存在唯一非奇异的
使得
,则
由此可得,由于
与
相似,
的特征值一定是
的对角元素,
通过最小二乘求解
而论文[4]中的方法是
假设有个干扰源,其中
就是
最大的
个特征值和对应特征向量构成的相关矩阵,若令
矩阵
,则
满足
,其中
,然后对
做特征分解,特征向量为
,取修正的导向矢量为
这相当于通过ESPRIT做源定位,然后找出一个定位与期望来波方向最接近的,相应的特征向量作为导向矢量,注意的特征向量就是组成
的向量。下一步是把相关矩阵关于
的特征值降到噪声水平,即
先看结果
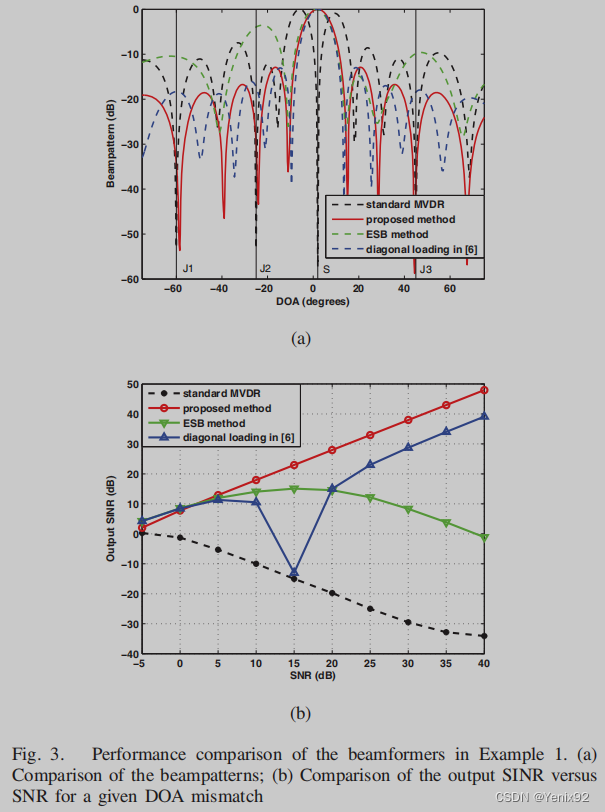
论文里没有明确说是如何估计的,实际上无论是ESPRIT还是[4]中的方法都没有办法完全把信号干扰子空间和噪声子空间分离,信号干扰子空间不过是从输入的相关矩阵最大的
个特征值对应的特征向量展开的空间估计,由于存在噪声,对于ESPRIT
因此是来波方向导向矢量的有偏估计。另外,不论
与
相差多少,输出总是保留
附近的信号,需要考虑进一步的限制,但若只按论文展示的结果看,效果还是可以的。
[6] Robust MVDR beamforming based on covariance matrix reconstruction
通常在其它文献中看到这篇文献的介绍都是一笔带过,最显赫的就是一条公式
十分简洁,但实际上这篇论文还是挺有意思的。论文再一次说明了在低SNR下由于噪声存在,MVDR会更少地专注于抵消有导向矢量失配来波,但是在高SNR下,抵消效应就很明显了。由于希望来自方向的信号在导各种误差下不会被抵消,对角加载人为地加入噪声,这显然也削弱了对干扰信号的抑制,而论文采用的方法是从相关矩阵中减去期望来波方向的分量,但是这样做就不能保证
是半正定的。这里就指出了从半正定矩阵
减去一个rank-1的共轭对称矩阵
则,即
最多只有一个小于零的特征值。下一步就是考虑如何修正这个
让它成为半正定。论文用整整一页去证明对
有
这就是说对于,来自
方向的信号被完全保护起来,但过大的
会像对角加载那样削弱对干扰信号的抑制,实际上
的选择还是如第一条公式所示。而
的方向基本上是接近
的,因此把
的最小的一个特征值变成噪声方差
它还是特征值中较小的一个,足以保护SOI。
Reference
[1] A. Kgabbazibasmenj, S. A. Vorobyov and A. Hassanien. Robust Adaptive Beamforming Based on Steering Vector Estimation With as Little as Possible Prior Information. IEEE Trans. Singal Process., vol. 60, no. 6, pp. 2974-2987. (2012)
[2] Y. Hunag, M. Zhou and S. A. Vorobyov. New Designs on MVDR Robust Adaptive Beamforming Based on Optimal Steering Vector Estimation. IEEE Trans. Singal Process., vol. 67, no. 14, pp. 3624-3638. (2019)
[3] L. Chang and C. Yeh. Performance of DMI and Eigenspace-Based Beamformers. IEEE Trans. Singal Process., vol. 40, no. 11, pp. 1336-1347. (1992)
[4] D. Li, Q. Yin, P. Wu and W. Guo. Robust MVDR Beamforming Using the DOA Matrix Decomposition. IEEE-ISAS 2011, pp. 105-110. (2011)
[5] R. Roy and T. Kailath. ESPRIT-Estimation of Signal Parameters Via Rotational Invariance Techniques. IEEE Trans. Singal Process., vol. 37, no. 7, pp. 984-995. (1989)
[6] P. Mu, D. Li, Q. Yin and W. Guo. Robust MVDR beamforming based on covariance matrix reconstruction. Sci. China Inform. Sci., vol. 56, 042303:1-042303:12. (2013)
Log
2023年11月29日 更新[1][2]
2023年11月30日 更新[3]
2023年12月4日 更新[4]
2023年12月6日 更新[6]

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









