






点击上方“3D视觉工坊”,选择“星标”
干货第一时间送达

作者:梦寐mayshine
链接:https://zhuanlan.zhihu.com/p/128937547
本文转载自知乎,作者已授权,未经许可请勿二次转载。
特征点:检测子(给一副图像找到特征点的位置)+描述子(特征向量,用于特征匹配)
一、图像特征介绍
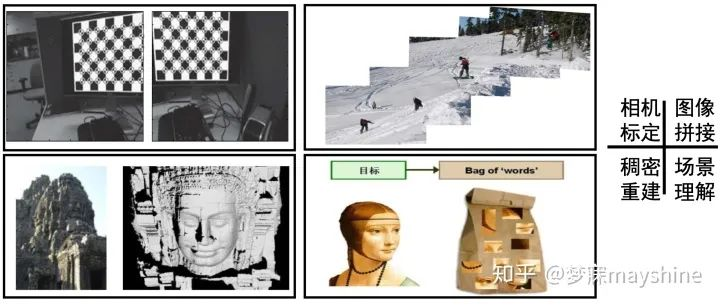
1、图像特征点的应用
相机标定:棋盘格角点阴影格式固定,不同视角检测到点可以得到匹配结果,标定相机内参
图像拼接:不同视角匹配恢复相机姿态
稠密重建:间接使用特征点作为种子点扩散匹配得到稠密点云
场景理解:词袋方法,特征点为中心生成关键词袋(关键特征)进行场景识别
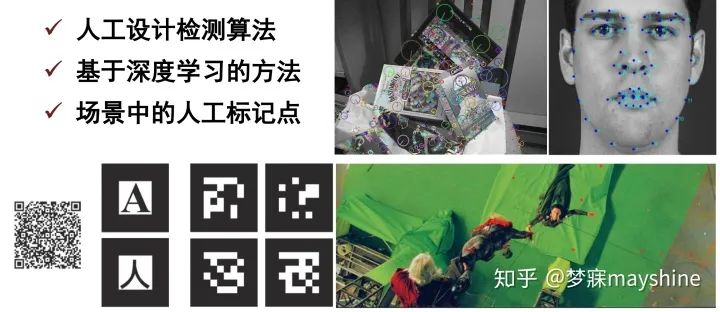
2、图像特征点的检测方法
人工设计检测算法:sift、surf、orb、fast、hog
基于深度学习的方法:人脸关键点检测、3D match点云匹配
场景中的人工标记点:影视场景背景简单的标记,特殊二维码设计(快速,精度低)
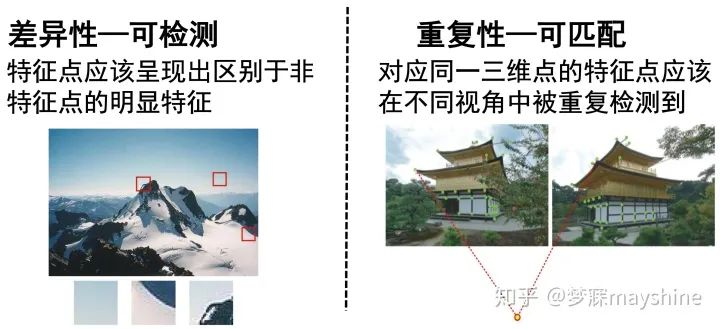
3、图像特征点的基本要求
差异性:视觉上场景上比较显著点,灰度变化明显,边缘点等
重复性:同一个特征在不同视角中重复出现,旋转、光度、尺度不变性
二、特征检测子
1、Harris 角点检测(早期,原理简单,视频跟踪,快速检测)
https://zhuanlan.zhihu.com/p/90393907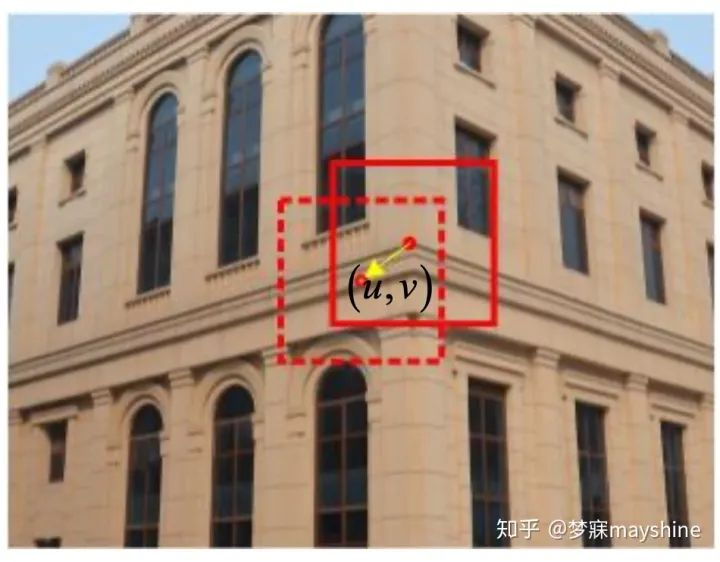
动机:特征点具有局部差异性
以每个点为中心取一个窗口,例如,5×5/7×7的像素,描述特征点周围环境
此点具有差异性->窗口往任意方向移动,则周围环境变化较大->具有局部差异性
最小二乘线性系统
加和符号:表示窗口内每个像素
w:表示权重,权值1或者以点为中心的高斯权重(离点越近权重越大)
I:表示像素,RGB/灰度
u,v:窗口移动的方向
H:harris矩阵,由两个方向上的梯度构建而成
图像梯度:

Harris矩阵:
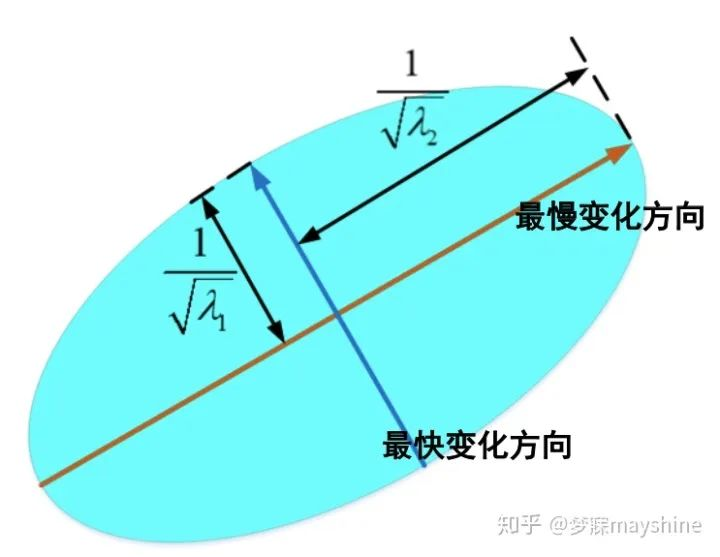
Harris矩阵H 的特征值分析
两个特征值反映相互垂直方向上的变化情况,分别代表变化最快和最慢的方向,特征值大变化快,特征值小变化慢
λ1 ≈ λ2 ≈ 0, 两个方向上变化都很小,兴趣点位于光滑区域
λ1 > 0 , λ2 ≈ 0 ,一个方向变化快,一个方向变化慢,兴趣点位于边缘区域
λ1 , λ2 > 0 , 两个方向变化都很快,兴趣点位于角点区域(容易判断)

反映特征值情况,trace为迹
k的值越小,检测子越敏感
只有当λ1和λ2同时取得最大值时,C才能取得较大值
避免了特征值分解,提高检测计算效率
非极大值抑制(Non-maximal Suppression) 选取局部响应最大值,避免重复的检测
算法流程:
0)滤波、平滑,避免出现阶跃函数
1)计算图像水平和垂直方向的梯度
2)计算每个像素位置的Harris矩阵
3)计算每个像素位置的Harris角点响应值

3+)非极大值抑制
4)找到Harris角点响应值大于给定阈值且局部最大的位置作为特征点
检测结果:
2、基于LoG的多尺度特征检测子
动机:Harris角点检测不具有尺度不变性,让特征点具有尺度不变性

解决方法:尺度归一化LoG算子,处理尺度的变化
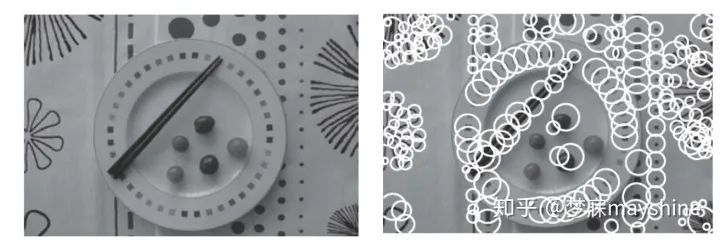
LoG算子:Lindeberg(1993)提出Laplacian of Gaussian (LoG)函数的极值点对应着特征点
尺度空间:
一副图像使用不同大小滤波核滤波(e.g.高斯滤波),越大的滤波核越模糊,分辨率越小,不同滤波核滤波后的空间为尺度空间=3维空间(图像+尺度),模拟人类视觉,较远物体模糊,一系列滤波核构成的不同分辨率图像为尺度空间->LoG能够处理不同尺度的图像

LoG算子[1]形式:高斯滤波性质:卷积->求拉普拉斯算子==求拉普拉斯算子->卷积 其中
 是LoG算子
是LoG算子
尺度归一化LoG[2](使得具有可比性=汇率):其中
是尺度归一化LoG算子

不同尺度下的LoG响应值不具有可比性
构建尺度空间,同时在位置空间和 尺度空间寻找归一化LoG极值(极大 /极小)点作为特征点
不同尺度下
的响应值
LoG特征检测算法流程
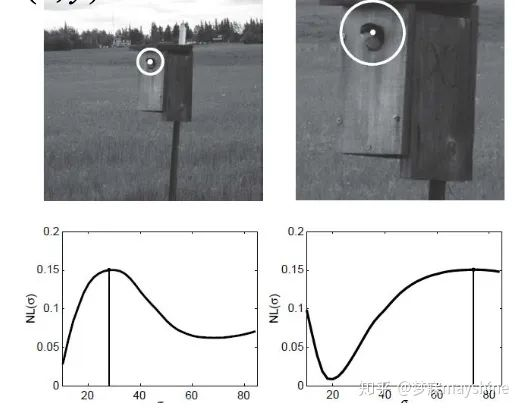
1)计算不同尺度上的尺度归一化LoG函数值
2)同时在位置和尺度构成的三维空间上寻找 尺度归一化LoG的极值点
3)进行非极大值抑制,减少重复检测 (去除冗余、保持稳定性)
检测结果:效果好,LoG计算量大
3、基于DoG的多尺度特征检测子(SIFT)——稳定和鲁棒
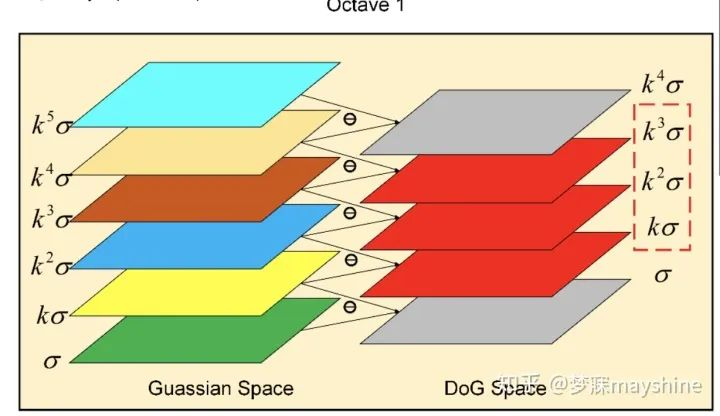
LoG可以由DoG近似:Lowe(2004)提出归一化LoG近似等价于相邻尺度的高斯差分(DoG)
高斯空间:
高斯差分DoG:相邻的空间做差,极点处对应特征点
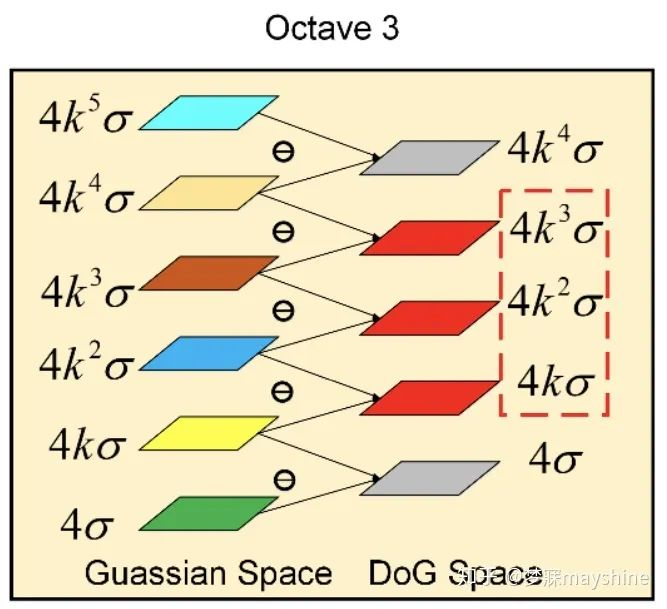
尺度空间的构建
高斯空间
高斯差分
有效差分
 (尺度空间有上下两个邻域才行,边界无效)
(尺度空间有上下两个邻域才行,边界无效)任意设置
阶数:O=3 (octave=阶,每阶图像尺寸减少一半,阶数高->运算量大->尺度变化大)
每阶有效差分数:S=3(每个阶内划分数)
每阶层数:N=S+3

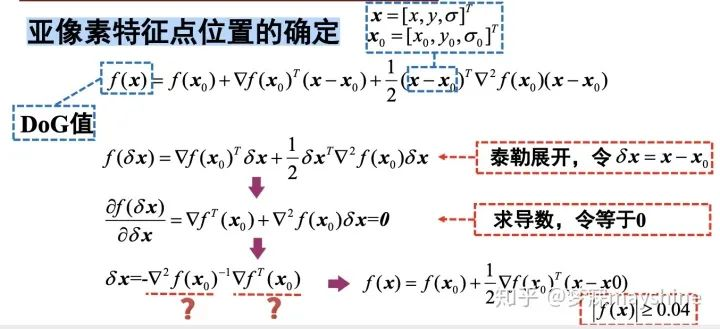
特征点位置的确定:
1)尺度空间和图像空间上:3*3窗口,26个邻域,找极值点比其他都要大DoG,LoG找极大值或极小值
2)横轴向代表离散位置,纵轴代表DoG响应值,在极值点邻域内求二阶函数的极值=准确像素位置
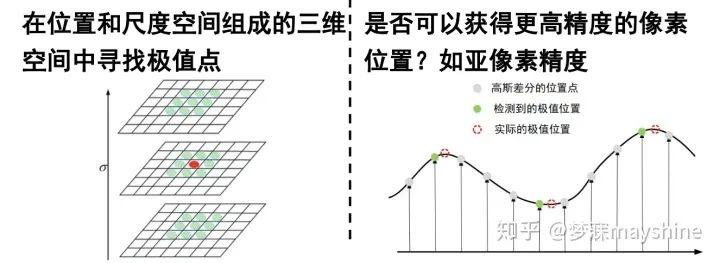
亚像素特征点位置的确定
x:
为三维,坐标空间+尺度空间
f(x):
为DoG值
x0:
检测到离散坐标下的极大值点
任务:在x0附近近似一个二阶函数,求二阶函数极值得到更准确的亚像素极值位置
矩阵的表达-1阶

矩阵的表达-2阶
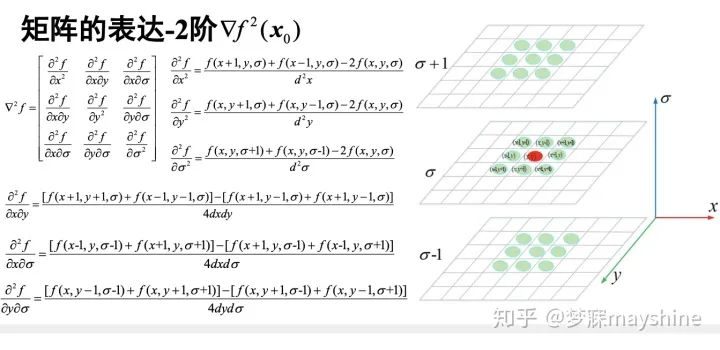
极值点有可能是边缘点,->除去边缘点:DoG在边缘处值较大,需要避免检测到边缘点
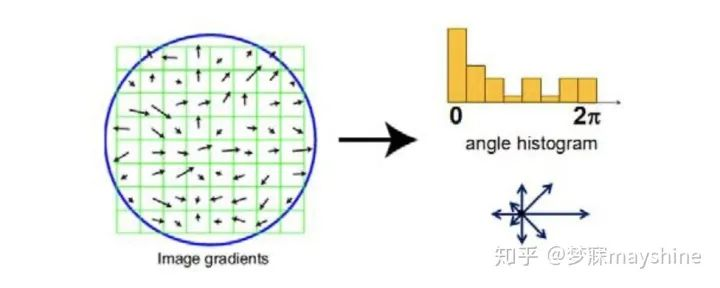
计算主方向:通过统计梯度直方图的方法确定主方向,使算法具有旋转不变性
SIFT特征检测流程:旋转不变性、尺度不变性、亮度 变化不变性,对视角变化、仿射变换有一定程度的稳定性
1)计算图像尺度空间:
2)DoG极值点检测与定位:保留
的特征点
3)边缘点去除:
4)计算主方向
5)生成描述子
6)检测结果

4、快速特征点检测方法:——实时性要求高
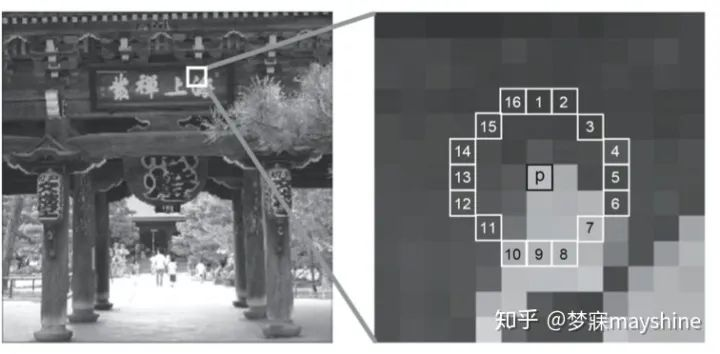
FAST特征点[3]:Feature from Accelerated Segment Test
特性:通过检测局部像素灰度变化来确认特征点的位置,速度快,SIFT的100倍;不具有尺度和旋转不变性
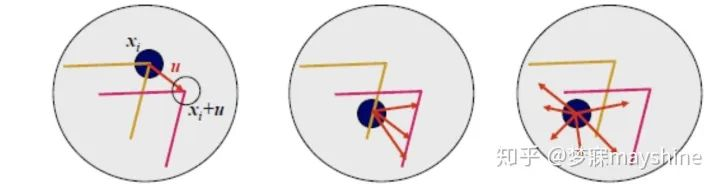
流程:
1)以候选点p为圆心构建一个离散圆
2)比较圆周上的像素与p点像素值
3)当有连续的n个像素值明显亮于或者暗于p时,p被检测为特征点,例Fast9,Fast12
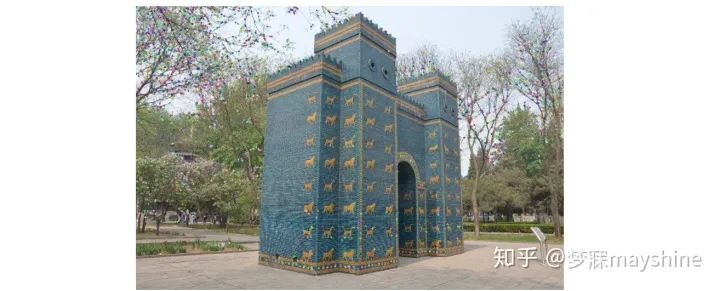
检测:
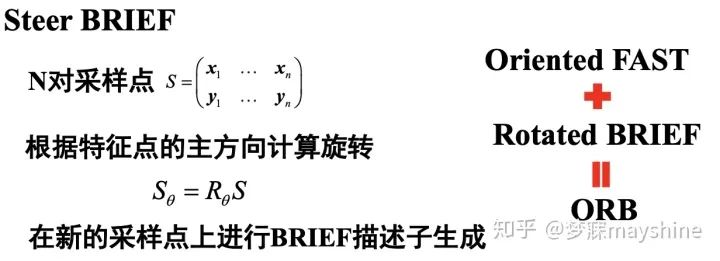
Oriented FAST (ORB)
获取尺度不变性:构建图像金字塔,在金字塔 每一层上检测关键点
获取旋转不变性 :通过灰度质心法(Intensity Centroid) 确定图像主方向
图像块B上的矩定义为:
图像块B的质心定义为 :
计算方向角 :
检测结果:

三、特征描述子
特征描述子 Feature Descriptor
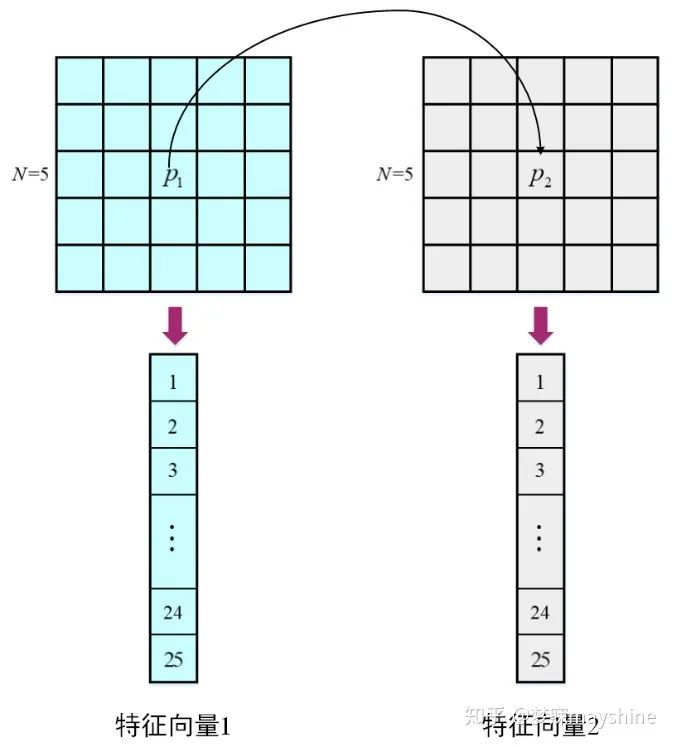
每个特征点独特的身份认证
同一空间点在不同视角的特征点具有高度相似的描述子
不同特征点的的描述子差异性尽量大
通常描述子是一个具有固定长度的向量
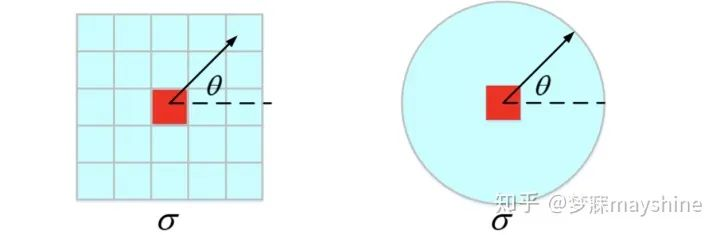
特征支持区域
主方向:进行旋转并重新插值
特征尺度:影响支持区域的大小
1、基于直方图的描述子
(1)用于微小运动的描述子 [4](e.g.相邻两帧视频)
定义:以特征点为中心的矩形区域内所有像素的灰度值作为描述子
特性:适用于微小变化的图像对 图像存在明显的旋转、尺度、光照和透视变换时不稳定
(2)Sift描述子——旋转主方向
定义:根据主方向对支持区域进行旋转,并通过双线性插值重构
特性:图像归一化处理,去除光照变化
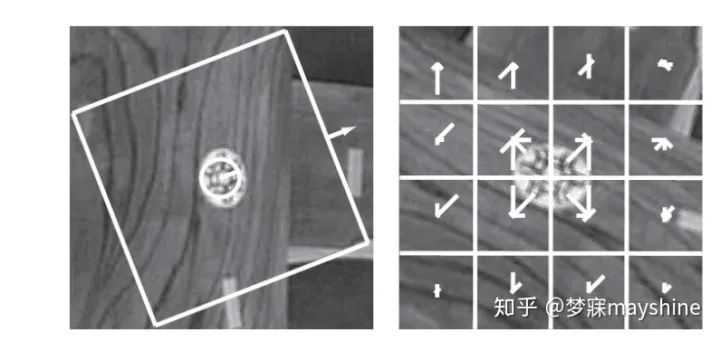
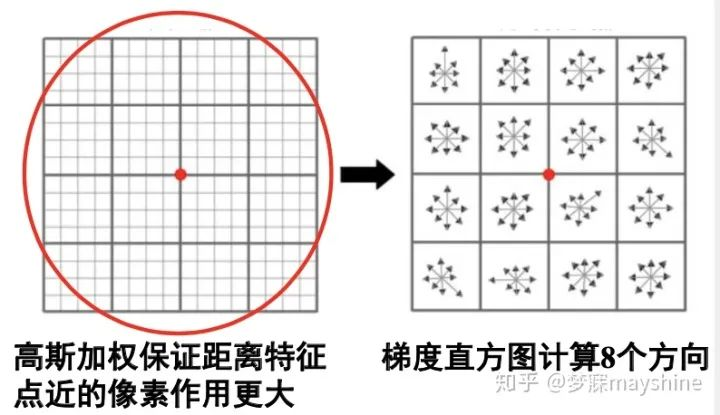
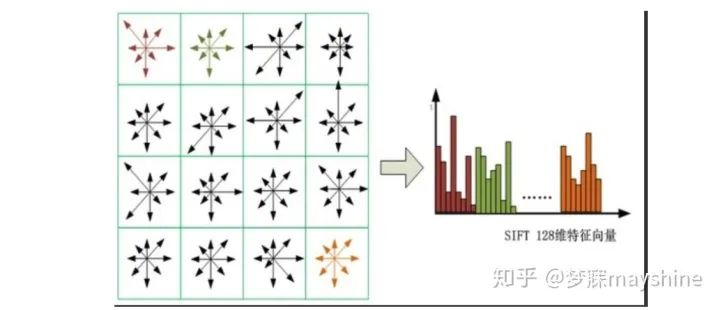
统计局部梯度信息流程:
1)将区域划分成4x4的block ;
2)每个block内统计梯度方向 的直方图(高斯加权梯度作为系数)
(2)Sift描述子——生成描述子
(2)Sift描述子——归一化处理
处理方式
1)门限处理-直方图每个方向的梯度幅值不超过0.2
2)描述子长度归一化
特性:归一化处理提升了特征点光度变化的不变性
SIFT描述子变种:PCA-SIFT/SURF
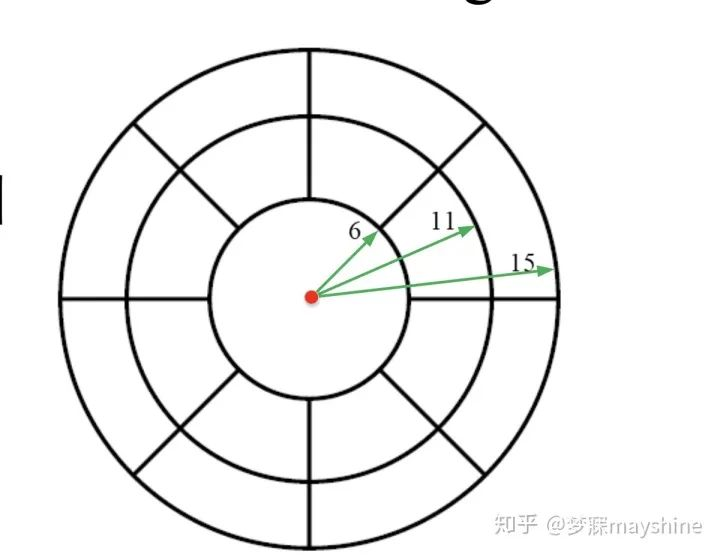
(3)GLOH描述子[5]:Gradient Location-orientation Histogram
一共有1+2x8=17 个blocks
每个blocks计算16个方向的直方图
描述子共16x17=272维
通过PCA可以降维到128
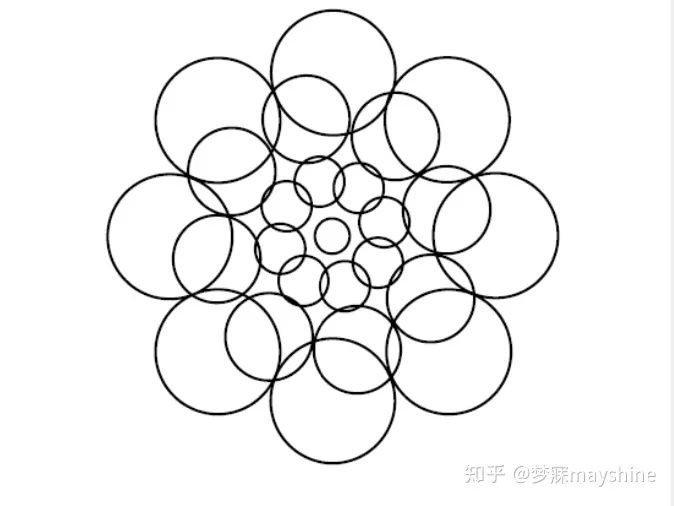
(4)DAISY描述子[6]:每个圆的半径对应高斯的尺度
2、基于不变性的描述子
3、二进制描述子——BRIEF
描述子形式:描述向量由N个0或者1组成 N=128,256,512
描述子特性:生成速度快(汉明距离),匹配效率高 ,简单有效;不具有旋转不变性
描述子流程:
1)图像进行如高斯滤波预处理——去除噪声
2)在支持区域内随机采样N对大小5×5的patch
3)比较patch内像素和的大小,并保留结果构成特征向量
p(x),p(y)是简历在x,y处的patch
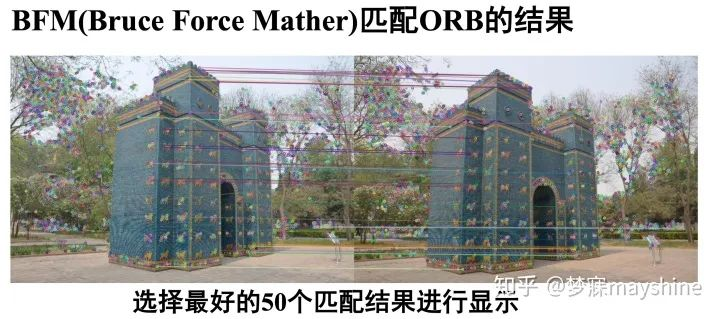
四、特征匹配
计算两幅图像中特征描述子的匹配关系
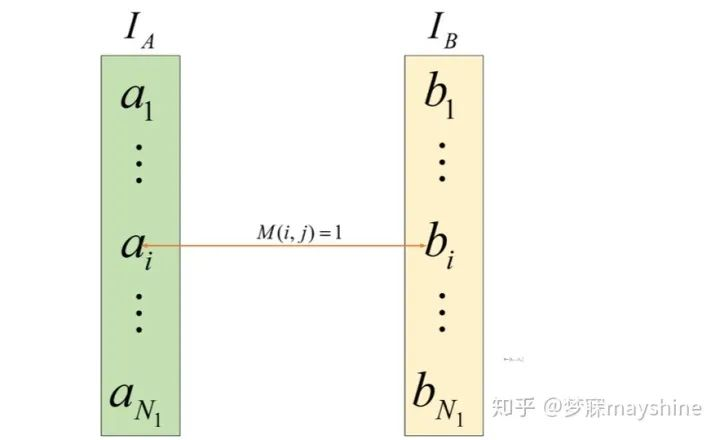
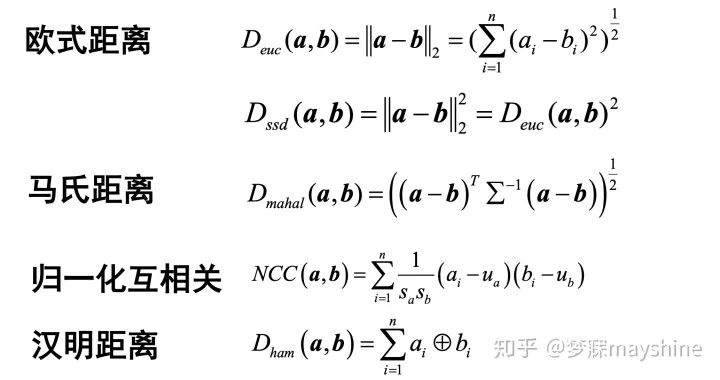
1、距离度量
归一化互相关,1 ->非常匹配,0->不匹配
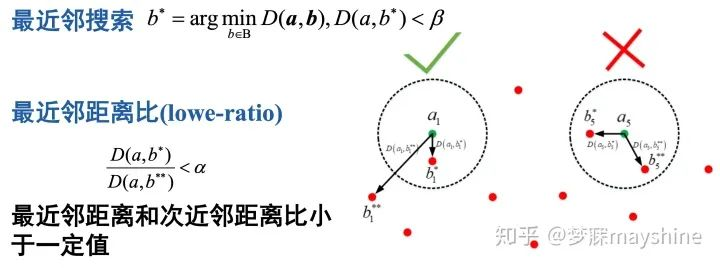
2、匹配策略
最近邻:加了距离约束,防止孤立点
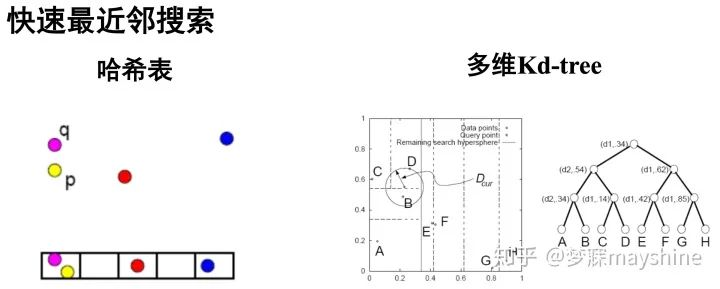
3、高效匹配
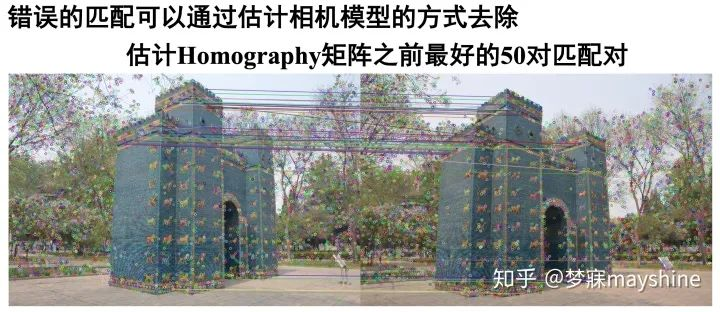
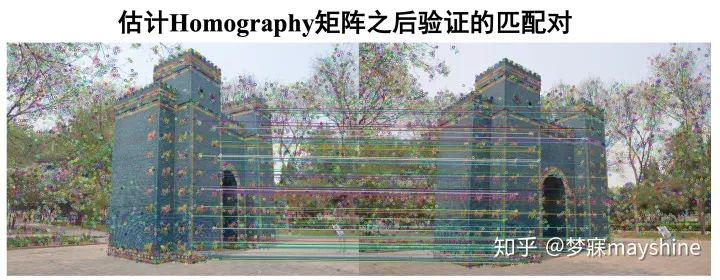
4、特征匹配验证
参考
T. Lindeberg. Detecting salient blob-like image structures and their scales with a scalespace primal sketch: A method for focus-of-attention. International Journal of Computer Vision, 11(3):283–318, Dec. 1993.
T. Lindeberg. Feature detection with automatic scale selection. International Journal of Computer Vision, 30(2):79–116, Nov. 1998.
E. Rosten and T. Drummond. Fusing points and lines for high performance tracking. In IEEE International Conference on Computer Vision (ICCV), 2005.
Scharstein, D. and Szeliski, R. (2002). A taxonomy and evaluation of dense two-framestereo correspondence algorithms. International Journal of Computer Vision, 47(1):7–42.
Mikolajczyk, K. and Schmid, C. (2005). A performance evaluation of local descriptors.IEEE Transactions on Pattern Analysis and Machine Intelligence, 27(10):1615–1630.
S. Winder and M. Brown. Learning local image descriptors. In IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), 2007.
推荐阅读:
那些精贵的3D视觉系统学习资源总结(附书籍、网址与视频教程)
机器人抓取汇总|涉及目标检测、分割、姿态识别、抓取点检测、路径规划
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会(ICRA/IROS/ROBIO/CVPR/ICCV/ECCV等)、顶刊(IJCV/TPAMI/TIP等)、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流等微信群,请扫描下面微信号加群,备注:”研究方向+学校/公司+昵称“,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进去相关微信群。原创投稿也请联系。

▲长按加微信群或投稿

▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的知识点汇总、入门进阶学习路线、最新paper分享、疑问解答四个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近1000+星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款

圈里有高质量教程资料、可答疑解惑、助你高效解决问题

















 993
993

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









