







 超级会员免费看
超级会员免费看
文章:CLOCs: Camera-LiDAR Object Candidates Fusion for 3D Object Detection
论文地址:在公众号「3D视觉工坊」,后台回复「Late-Fusion」,即可直接下载。
0 前言
目前很多3D目标检测的工作都朝着多模态融合的方向发展,即是不仅仅使用单张图像或者仅仅使用点云做3D目标检测任务,而是在融合这两种传感器信息上作出一定的探索,今天笔者想要分享的一篇研究工作即是在这方面比较新的文章。论文
笔者给出该文章目前在KITTI object 3d的实验效果如下.(本文介绍的这篇文章于20.9.1放置在arxiv上,并不是下图对应的IROS的文章,但是是同一个作者)
KITTI检测结果可视化如下。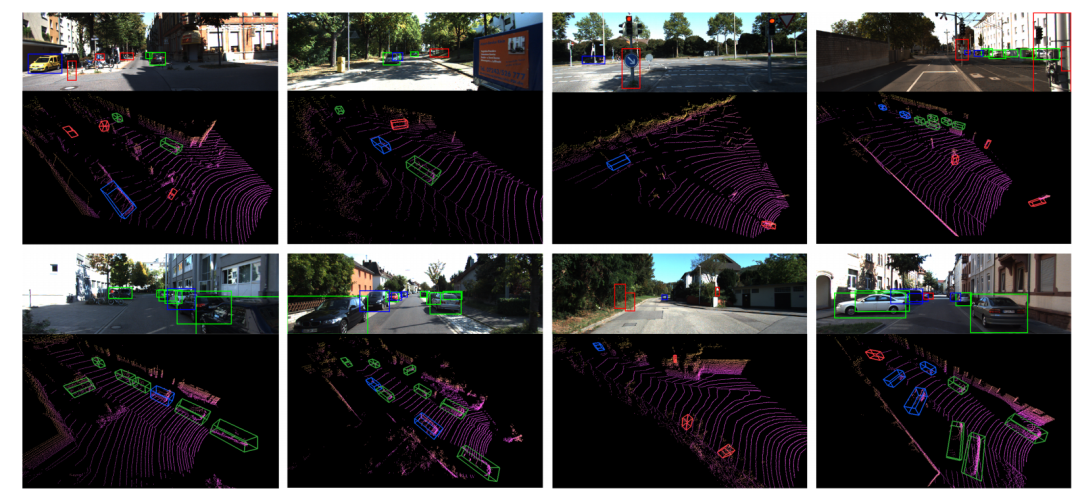

 订阅专栏 解锁全文
订阅专栏 解锁全文




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











