



点击上方“3D视觉工坊”,选择“星标”
干货第一时间送达
本文作者:邛亦简
https://zhuanlan.zhihu.com/p/56808180
编辑丨Smarter
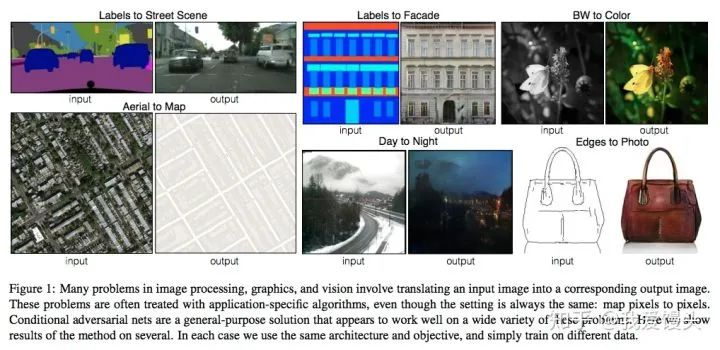
所谓图像翻译,指从一副图像到另一副图像的转换。可以类比机器翻译,一种语言转换为另一种语言。下图就是一些典型的图像翻译任务:比如语义分割图转换为真实街景图,灰色图转换为彩色图,白天转换为黑夜......
本文主要介绍图像翻译的三个比较经典的模型pix2pix,pix2pixHD, vid2vid。pix2pix提出了一个统一的框架解决了各类图像翻译问题,pix2pixHD则在pix2pix的基础上,较好的解决了高分辨率图像转换(翻译)的问题,vid2vid则在pix2pixHD的基础上,较好的解决了高分辨率的视频转换问题。三个模型一步一个脚印,不断改进。
1、pix2pix
论文:pix2pix 代码:GitHub
本文最大的贡献在于提出了一个统一的框架解决了图像翻译问题。
在这篇paper里面,作者提出的框架十分简洁优雅(好用的算法总是简洁优雅的)。相比以往算法的大量专家知识,手工复杂的loss。这篇paper非常粗暴,使用CGAN处理了一系列的转换问题。
上面展示了许多有趣的结果,比如分割图 街景图,边缘图
真实图。对于第一次看到的时候还是很惊艳的,那么这个是怎么做到的呢?我们可以设想一下,如果是我们,我们自己会如何设计这个网络。
简单粗暴的办法
最直接的想法就是,设计一个CNN网络,直接建立输入-输出的映射,就像图像去噪问题一样。可是对于上面的问题,这样做会带来一个问题。生成图像质量不清晰。
拿下图第二排的分割图 街景图为例,语义分割图的每个标签比如“汽车”可能对应不同样式,颜色的汽车。那么模型学习到的会是所有不同汽车的评均,这样会造成模糊。下图第三列就是直接用L1 Loss来学习得到的结果,相比于Ground truth,模糊很严重

如何解决模糊呢?
这里作者想了一个办法,即加入GAN的Loss去惩罚模型。GAN相比于传统生成式模型可以较好的生成高分辨率图片。思路也很简单,在上述直观想法的基础上加入一个判别器,判断输入图片是否是真实样本。模型示意图如下:
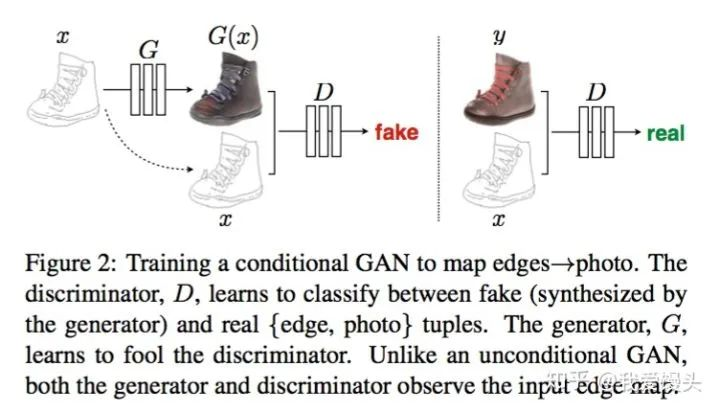
上图模型和CGAN有所不同,但它是一个CGAN,只不过输入只有一个,这个输入就是条件信息。原始的CGAN需要输入随机噪声,以及条件。这里之所有没有输入噪声信息,是因为在实际实验中,如果输入噪声和条件,噪声往往被淹没在条件C当中,所以这里直接省去了。
其他tricks
从上面两点可以得到最终的Loss由两部分构成:
输出和标签信息的L1 Loss。
GAN Loss - 测试也使用Dropout,以使输出多样化

采用L1 Loss而不是L2 Loss的理由很简单,L1 Loss相比于L2 Loss保边缘(L2 Loss基于高斯先验,L1 Loss基于拉普拉斯先验)。
GAN Loss为LSGAN的最小二乘Loss,并使用PatchGAN(进一步保证生成图像的清晰度)。PatchGAN将图像换分成很多个Patch,并对每一个Patch使用判别器进行判别(实际代码实现有更取巧的办法,实际是这样实现的:假设输入一张256x256的图像到判别器,输出的是一个4x4的confidence map,每一个像素值代表当前patch是真实图像的置信度。感受野就是当前的图像patch),将所有Patch的Loss求平均作为最终的Loss。
2、pix2pixHD
论文:pix2pixHD 代码:GitHub
这篇paper作为pix2pix的改进版本,如其名字一样,主要是可以产生高分辨率的图像。具体来说,作者的贡献主要在以下两个方面:
使用多尺度的生成器以及判别器等方式从而生成高分辨率图像。
使用了一种非常巧妙的方式,实现了对于同一个输入,产生不同的输出。并且实现了交互式的语义编辑方式,这一点不同于pix2pix中使用dropout保证输出的多样性。
高分辨率图像生成
为了生成高分辨率图像,作者主要从三个层面做了改进:
模型结构
Loss设计
使用Instance-map的图像进行训练。
模型结构
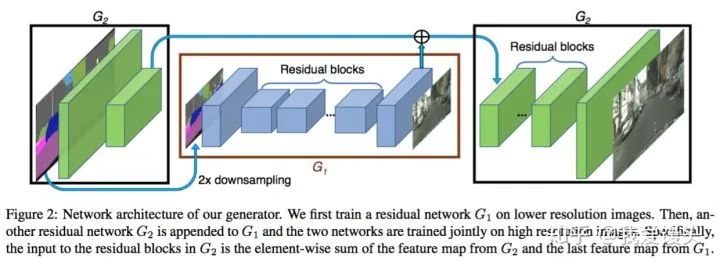
生成器由两部分组成,G1和G2,其中G2又被割裂成两个部分。G1和pix2pix的生成器没有差别,就是一个end2end的U-Net结构。G2的左半部分提取特征,并和G1的输出层的前一层特征进行相加融合信息,把融合后的信息送入G2的后半部分输出高分辨率图像。
判别器使用多尺度判别器,在三个不同的尺度上进行判别并对结果取平均。判别的三个尺度为:原图,原图的1/2降采样,原图的1/4降采样(实际做法为在不同尺度的特征图上进行判别,而非对原图进行降采样)。显然,越粗糙的尺度感受野越大,越关注全局一致性。
生成器和判别器均使用多尺度结构实现高分辨率重建,思路和PGGAN类似,但实际做法差别比较大。
Loss设计
这里的Loss由三部分组成:
GAN loss:和pix2pix一样,使用PatchGAN。
Feature matching loss:将生成的样本和Ground truth分别送入判别器提取特征,然后对特征做Element-wise loss
Content loss:将生成的样本和Ground truth分别送入VGG16提取特征,然后对特征做Element-wise loss

使用Feature matching loss和Content loss计算特征的loss,而不是计算生成样本和Ground truth的MSE,主要在于MSE会造成生成的图像过度平滑,缺乏细节。Feature matching loss和Content loss只保证内容一致,细节则由GAN去学习。
使用Instance-map的图像进行训练
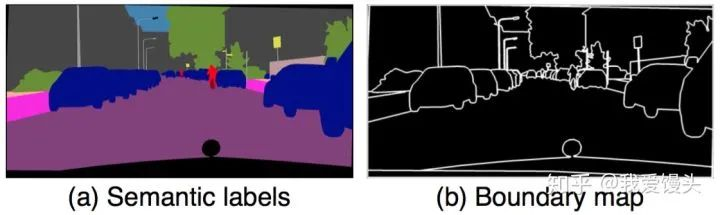
pix2pix采用语义分割的结果进行训练,可是语义分割结果没有对同类物体进行区分,导致多个同一类物体排列在一起的时候出现模糊,这在街景图中尤为常见。在这里,作者使用个体分割(Instance-level segmention)的结果来进行训练,因为个体分割的结果提供了同一类物体的边界信息。具体做法如下:
根据个体分割的结果求出Boundary map
将Boundary map与输入的语义标签concatnate到一起作为输入 Boundary map求法很简单,直接遍历每一个像素,判断其4邻域像素所属语义类别信息,如果有不同,则置为1。下面是一个示例:
语义编辑
不同于pix2pix实现生成多样性的方法(使用Dropout),这里采用了一个非常巧妙的办法,即学习一个条件(Condition)作为条件GAN的输入,不同的输入条件就得到了不同的输出,从而实现了多样化的输出,而且还是可编辑的。具体做法如下:
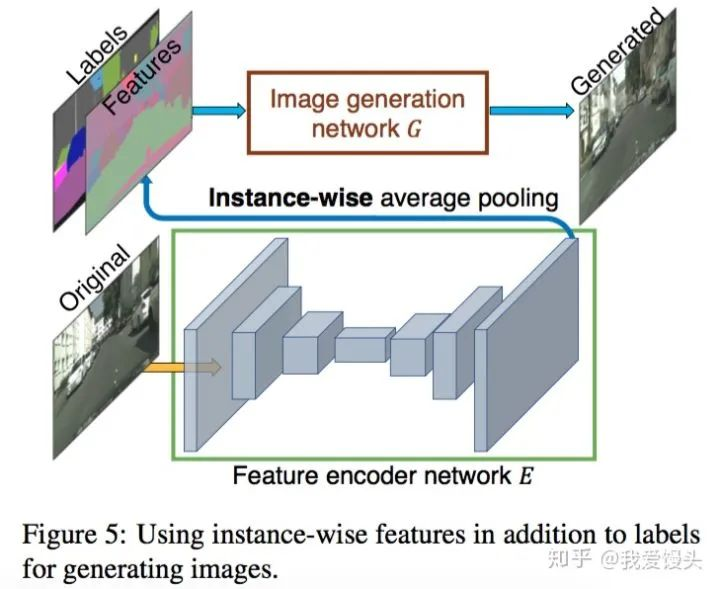
首先训练一个编码器
利用编码器提取原始图片的特征,然后根据Labels信息进行Average pooling,得到特征(上图的Features)。这个Features的每一类像素的值都代表了这类标签的信息。
如果输入图像有足够的多,那么Features的每一类像素的值就代表了这类物体的先验分布。对所有输入的训练图像通过编码器提取特征,然后进行K-means聚类,得到K个聚类中心,以K个聚类中心代表不同的颜色,纹理等信息。
实际生成图像时,除了输入语义标签信息,还要从K个聚类中心随机选择一个,即选择一个颜色/纹理风格
这个方法总的来说非常巧妙,通过学习数据的隐变量达到控制图像颜色纹理风格信息。
总结
作者主要的贡献在于:
提出了生成高分辨率图像的多尺度网络结构,包括生成器,判别器
提出了Feature loss和VGG loss提升图像的分辨率 - 通过学习隐变量达到控制图像颜色,纹理风格信息
通过Boundary map提升重叠物体的清晰度
可以看出,这篇paper除了第三点,都是针对性的解决高分辨率图像生成的问题的。可是本篇工作只是生成了高分辨率的图像,那对于视频呢?接下来会介绍Vid2Vid,这篇paper站在pix2pixHD的基础上,继续做了许多拓展,特别是针对视频前后帧不一致的问题做了许多优化。
3、vid2vid
论文:Vid2Vid 代码:项目主页
Vid2Vid作为pix2pix, pix2pixHD的改进版本,重点解决了视频到视频转换过程中的前后帧不一致性问题。
视频生成的难点
GAN在图像生成领域虽然研究十分广泛,然而在视频生成领域却还存在许多问题。主要原因在于生成的视频很难保证前后帧的一致性,容易出现抖动。对于视频问题,最直观的想法便是加入前后帧的光流信息作为约束,Vid2Vid也不例外。由于Vid2Vid建立在pix2pixHD基础之上,加入时序约束。因此可以实现高分辨率视频生成
作者给出的方案
生成器加入光流约束
判别器加入光流信息
对前景、背景分别建模
3.1 对生成器加入光流约束
符号定义:
输入图像序列:
目标图像序列:
生成的图像序列:
视频-视频转换问题可以建模为如下一个条件分布:
那么我们可以训练一个CNN,将条件分布 建模为
进一步
可以表示为:
上面这个公式有三个未知量 。这三个未知量都是通过学习一个CNN得到的。
表示t-1帧到t帧的光流,光流的计算通过学习一个CNN来实现。
表示利用t-1帧光流信息预测得到的第t帧的输出
表示当前帧的输出结果,也是利用CNN来实现。
表示输出结果的模糊程度。
最终输出的结果由 和
加权得到。二者的权重通过学习一个CNN来实现,权重代表
生成结果的模糊程度,越模糊,则
的比重越低。
如何学习一个计算光流的CNN?
这个其实很简单,用 表示生成前后两帧图片的光流,
表示目标图像(Ground truth)前后两帧的光流。训练时只要最小化二者的重构误差就可以了。此外,利用第t帧的光流信息以及第t帧的Ground truth
应当能够完美重构第t+1帧。所以Loss如下:
第一点改进就是这些啦。下面说一下第二点。
3.2 对判别器器加入光流约束
这里作者使用了两个判别器,一个是图像粒度的判别器。这个比较简答,使用CGAN。另一个是视频粒度的判别器。输入为视频序列及其光流信息,同样输入到CGAN。
3.3 对前景,背景分别建模
对于语义地图转换为街景图这个任务,作者还分别对前景,背景进行建模,以加快收敛速度。具体来说,可以把语义地图中的“行人”,“车辆”当做前景,“树木”,“道路”当做背景。背景通常都是不动的,因此光流计算会很准,所以得到的图像也会很清晰。因此,我们可以设置一个mask,控制前景和背景的透明度。具体公式如下: 和
分别代表前景和背景。二者也是通过CNN实现,
是背景的不透明度。
整个文章的idea就是上述三点了。对于前两点,在视频生成领域非常有借鉴意义。
本文仅做学术分享,如有侵权,请联系删文。
下载1
在「3D视觉工坊」公众号后台回复:3D视觉,即可下载 3D视觉相关资料干货,涉及相机标定、三维重建、立体视觉、SLAM、深度学习、点云后处理、多视图几何等方向。
下载2
在「3D视觉工坊」公众号后台回复:3D视觉github资源汇总,即可下载包括结构光、标定源码、缺陷检测源码、深度估计与深度补全源码、点云处理相关源码、立体匹配源码、单目、双目3D检测、基于点云的3D检测、6D姿态估计源码汇总等。
下载3
在「3D视觉工坊」公众号后台回复:相机标定,即可下载独家相机标定学习课件与视频网址;后台回复:立体匹配,即可下载独家立体匹配学习课件与视频网址。
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流、ORB-SLAM系列源码交流、深度估计等微信群。
一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。

▲长按加微信群或投稿

▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的知识点汇总、入门进阶学习路线、最新paper分享、疑问解答四个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近2000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款

圈里有高质量教程资料、可答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~ 

















 754
754

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









