






来源丨高工智能汽车
点击进入—>3D视觉工坊学习交流群

基于厘米级定位、超低功率、强抗干扰、超大容量等技术特点,UWB(超宽带)技术在消费电子、智能汽车等领域的应用前景被赋予厚望。
值得一提的是,利用UWB雷达还可实现舱内活体检测、脚踢尾箱等,这意味着新一轮座舱感知革命已经开启。
UWB雷达基本原理
UWB雷达的工作原理与UWB定位完全不同。UWB雷达系统不需要UWB标签的存在,其工作原理与飞机和汽车上用的各类雷达类似。
UWB雷达发射UWB脉冲信号,并接收该脉冲信号经障碍物反射后的回波,通过对回波扰动的分析来判断UWB雷达附近是否存在物体(或人)。具体来讲,UWB雷达通过接收到的CIR(Channel Impulse Response信道脉冲响应)来探测周围物体及其运动。
1、当UWB雷达周围有物体时,CIR对应位置就会有脉冲峰。
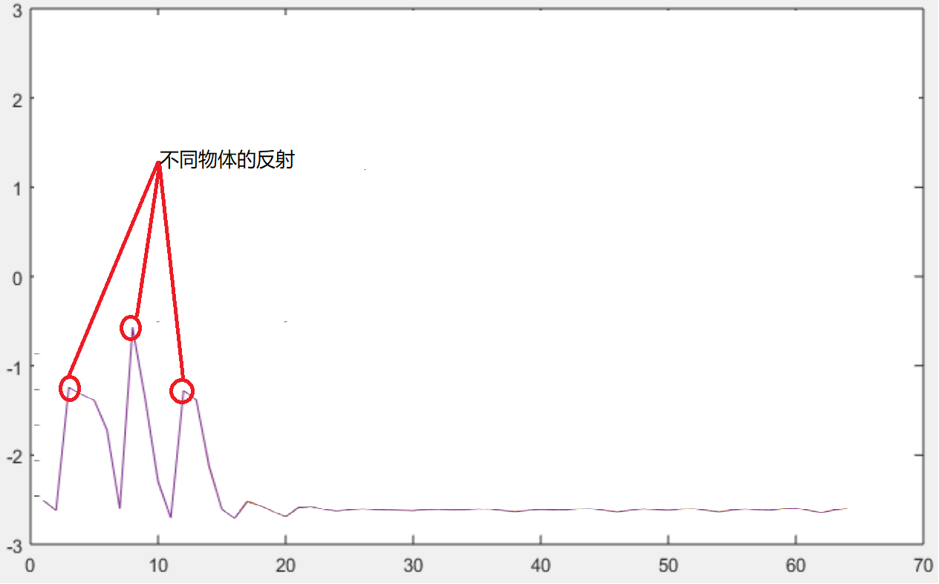
2、当周围物体运动时,由于多普勒效应,对应的CIR值就会变化,可通过分析CIR频谱来估计运动状态。目前常见500M带宽的UWB芯片,静态位置分辨率较低,但可以用作动态雷达,来检测物体的运动。
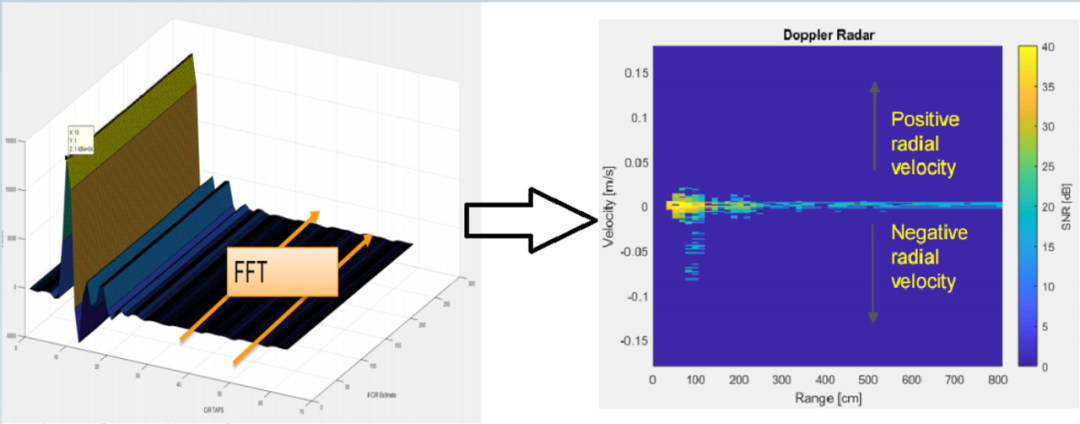
UWB雷达原理图
UWB雷达性能特点
以UWB行业头部厂家全迹科技UWB雷达V1.0算法为例,具有以下性能特点:
1、灵敏度和检测范围
灵敏度和检测范围跟算法、天线设计、物体反射面积、物体运动幅度等因素有关,算法能够完成以下检测:
1)检测微小的呼吸运动,已实现天线正面,距离不小于0.8米,视场角±60°范围内的呼吸运动的检测。
2)检测环境内的人体活动(包括行走,上身、胳膊、头部等的微小摆动等),可实现天线正面,距离不小于1.6米,视场角±60°范围内的人体活动的检测。
2、响应速度
波形实时变化,可以跟踪频率15Hz内的快速运动,比如快速的踢脚运动。

3、系统组成
UWB雷达目前有两种模式。一种是单锚点模式(收发一体,单颗独立运行),一种是双锚点模式(1发+1收,必须组合运行)。单锚点模式覆盖范围有限,但是构造简单、成本低廉;双锚点模式覆盖范围略大,但是成本也更高,可以复用UWB数字钥匙。
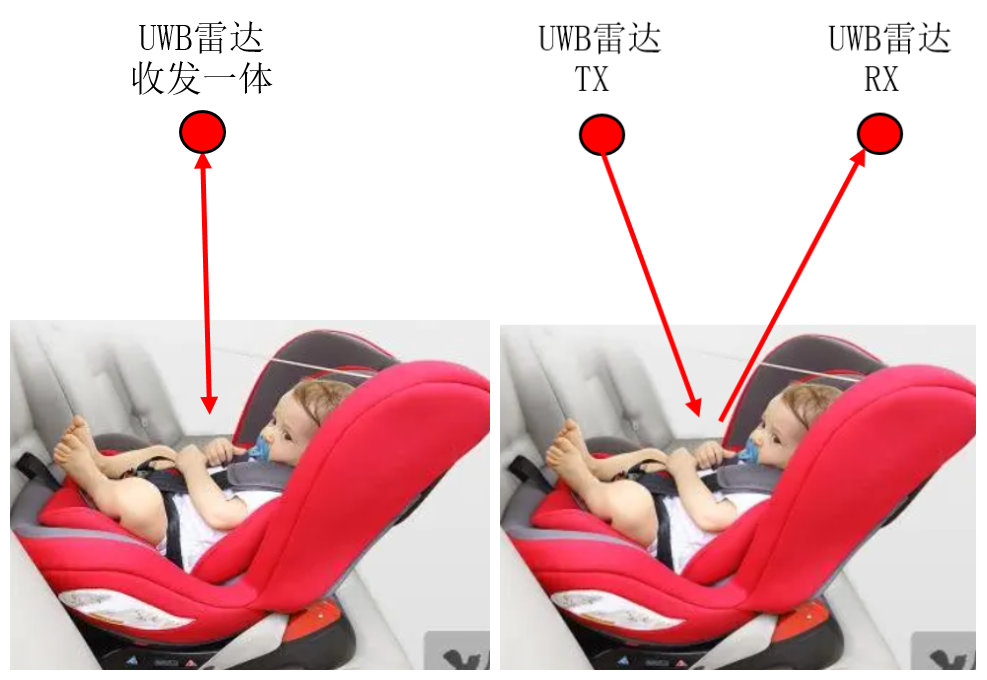
单锚点模式与双锚点模式
4、计算量
算法经过深度优化和精简,计算量可大为减少,便于集成到现有MCU中。全迹科技UWB单锚点雷达可以仅在1颗UWB SOC上直接实现完整雷达功能,以最大程度降低成本。
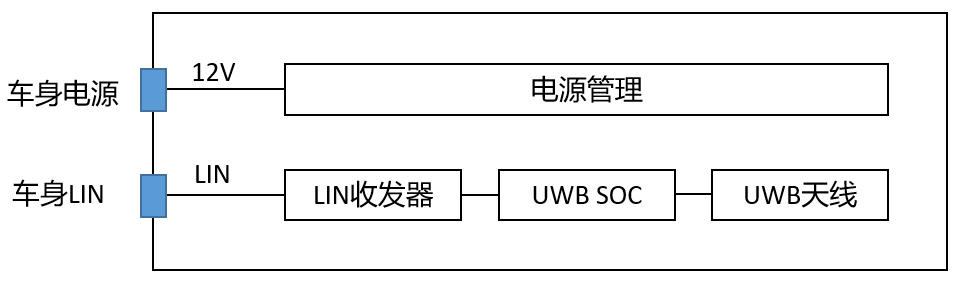
雷达模组框图
UWB雷达的汽车应用
1、活体检测
“将儿童单独留在停放的车内,即使只有几分钟,也可能导致中暑和死亡,尤其是当汽车暴露在阳光下时。儿童无法自行下车,再加上对高温的耐受性较低,因此要求儿童不得留在车内无人看管。温度可以在短短15分钟内达到临界水平,让窗户半开着几乎不能减少威胁。与车祸相比,儿童死于车辆相关中暑的情况较少发生,但这些完全可以避免的死亡的性质值得特别关注,因为解决车内儿童体温过高问题的技术已经存在。”以上文字来自欧洲NCAP关于儿童存在检测的测试与评估标准的直接翻译。
活体检测在汽车上主要用于儿童存在检测(CPD – Child Presence Detection),国外也有叫后排占用告警(ROA - Rear Occupant Alert)或Hot Car。
欧洲NCAP计划从2023年1月起增加对车内儿童存在检测的评分,各项规定非常细致。美国正在立法要求所有新车预装儿童存在检测功能,预计在2025年全面实施。据说国内相关规范也在评估制订中。
目前车内儿童存在检测的识别方式有直接与间接两大类。直接方式指的是通过尝试检测心跳、呼吸、运动、或其它生命指征来判定儿童是否存在;间接方式指的是通过一些逻辑信息来推断车内人员存在的可能性,信息包括:车门打开、压力感应、电容感应等。
欧洲NCAP规定从2025起间接方式将无法获得安全评分,因此直接方式最有前景。目前较有效的直接方式传感器主要是:摄像头、毫米波雷达、UWB雷达,下面做简要比较。
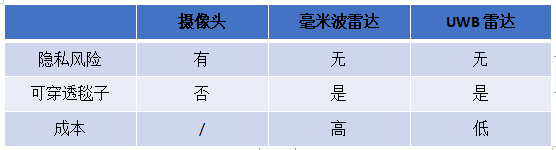
摄像头是常见的传感器,甚至可以与车内DMS/OMS(驾驶员/乘客监测系统)共用。摄像头方案的主要问题一是有隐私泄露风险,二是缺少穿透力,例如很难透过毛毯和遮阳伞等障碍物。
欧洲NCAP要求儿童存在检测可以覆盖安全座椅向后安装、盖着毯子/遮阳伞、四肢不动、熟睡的婴儿,摄像头检测方案很可能会丢分。
毫米波雷达是另一种方案,相比摄像头方案优势是没有隐私担心,且有一定的穿透力(可以透过毯子)。毫米波雷达的问题一是成本较高(相比UWB雷达),二是有无线电合规隐患。
根据2021年11月我国工信部颁布的《汽车雷达无线电管理暂行规定》:24G毫米波雷达已经禁止在新车上使用;77G毫米波雷达主要用于自适应巡航、防撞、盲点探测等应用;60G毫米波虽是目前舱内雷达使用的主要频段,但工信部本次规定尚未包含对60GHz频段的说明。
UWB雷达提供了一种新方案。没有隐私担心(相比摄像头),有穿透力(相比摄像头),成本适中(低于毫米波雷达),低功耗(低于毫米波雷达),目前看来是较好的车内儿童存在检测方案,能满足各项法规要求。
2、脚踢尾箱
在人双手拿着东西时,用脚在后保险杠下踢一下或来个扫堂腿,可以方便的开关尾箱门,这已经成为很多车型的舒适性配置,而脚踢尾箱技术也有不同的实现方案。
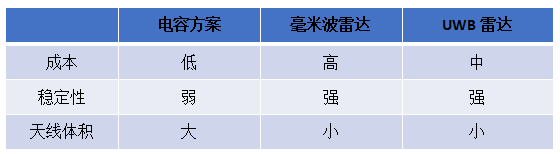
现在大部分脚踢尾箱技术采用电容传感器方案。通过在车尾保险杠内放两条电容天线,通过电容变化可识别人是否有踢腿动作。电容脚踢尾箱方案价格较便宜,但一般认为工作不够稳定,容易误触发或失灵。
从网上能查到较多车主的反馈,例如:脚踢不够灵敏经常踢不开,下雨时尤其严重;或者在洗车的时候人从尾门走过时,会误触发电动尾门开关自动打开后备箱。理论上电容方案对电磁干扰也较为敏感,当周边电磁环境复杂时容易失灵。
毫米波雷达是一种备选替代方案,通过对毫米波雷达回波的分析,可以有效检测踢腿的动作。并且毫米波不受周边电磁环境的干扰,雨水的影响也不大。目前车载毫米波脚踢尾箱雷达最大的问题是价格较昂贵(相比电容方案和UWB雷达方案)。
UWB雷达提供了另一种选项。稳定性足够高(相比电容方案),成本适中(比电容方案贵,比毫米波方案便宜),低功耗(低于毫米波雷达)
UWB雷达的应用产品
高工智能汽车了解到,目前全迹科技UWB雷达产品已经获得多个主机厂和tier1的意向订单。而全迹提供的多种灵活合作方式包括:
1、提供UWB雷达完整产品
包含:硬件整机 + 软件算法。可单锚点工作(极致精简不含MCU,可靠性更高、性价比突出),也可2个锚点组合工作(提供更大覆盖范围)。
雷达整机
2、提供UWB雷达邮票孔板卡
包含:硬件PCBA + 天线 + 软件算法。
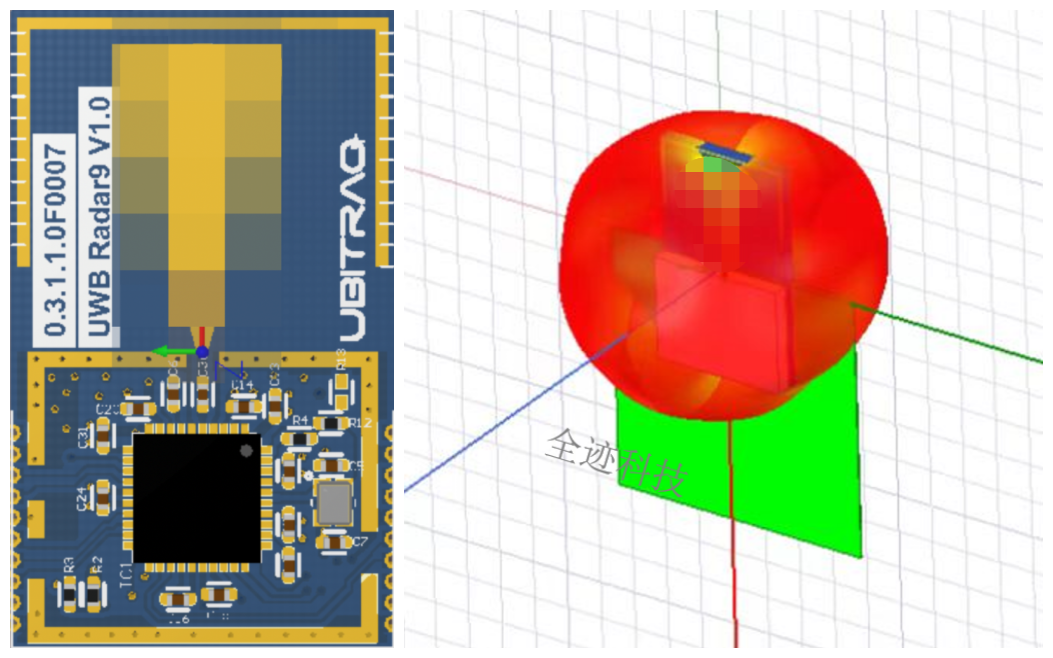
雷达模组与天线仿真
3、提供UWB雷达软件授权
仅提供软件算法lib库,适配到客户自己的硬件中。
4、提供UWB定位 + 测距复用软件授权
仅提供软件算法lib库和UWB测距复用支持,适配到客户自己的硬件中。
除了UWB雷达产品外,全迹科技正在将其行业首创、已获专利授权的UWB-AOA单基站定位系统引入UWB数字钥匙场景。该产品可将UWB数字钥匙单车锚点数量从5个(车外4个+车内1或2个)降低到最少1个(车内部署1个UWB-AOA)。
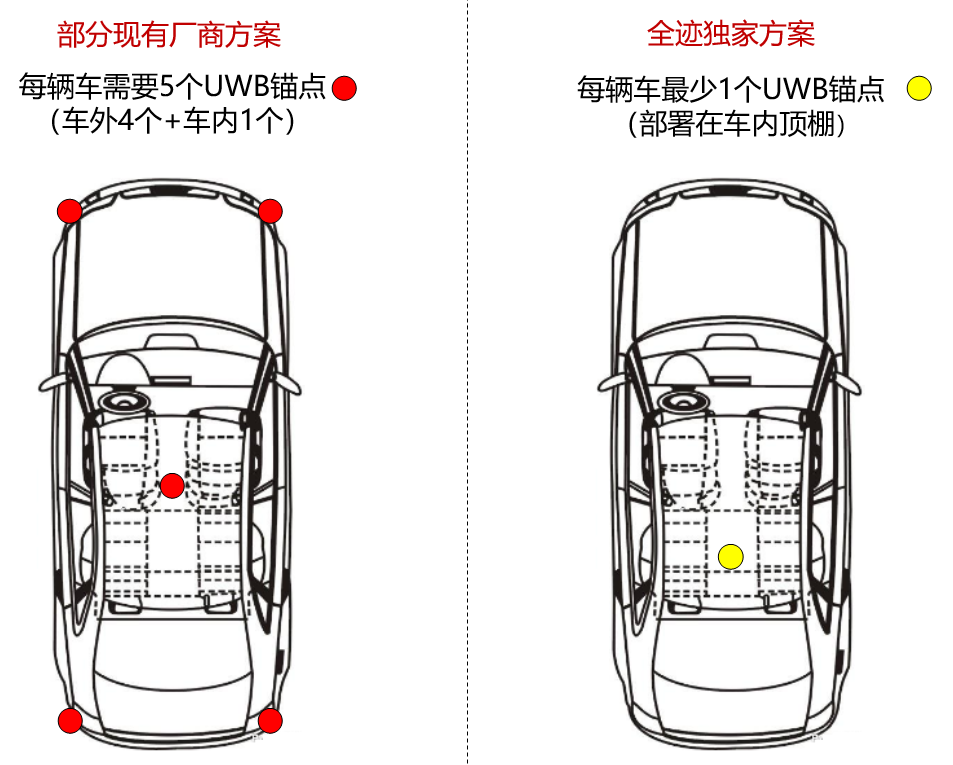
该产品具备以下几个优势:
1、UWB锚点数量从5到1,大幅降低硬件成本;
2、减少了器件和线束,降低组装难度和成本;
3、减少了复杂度,提高了可靠性;
4、降低了出险维修成本;
该创新产品无疑将推动UWB数字钥匙的更广泛落地,让UWB数字钥匙体验惠及更多消费者。据全迹透露,该产品目前处于内测阶段。
近年来,越来越多的手机和汽车开始纷纷引入UWB技术,UWB正在走进大众视野成为一项时髦的黑科技。UWB独特的物理特性不仅能赋予汽车精准数字钥匙交互能力,还能提供极具竞争力的舱内雷达方案。
深耕UWB技术多年的全迹科技,有望成为UWB数字钥匙与雷达产品极具创新力的供应商。
本文仅做学术分享,如有侵权,请联系删文。
点击进入—>3D视觉工坊学习交流群
干货下载与学习
后台回复:巴塞罗那自治大学课件,即可下载国外大学沉淀数年3D Vison精品课件
后台回复:计算机视觉书籍,即可下载3D视觉领域经典书籍pdf
后台回复:3D视觉课程,即可学习3D视觉领域精品课程
3D视觉工坊精品课程官网:3dcver.com
1.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
2.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进
3.国内首个面向工业级实战的点云处理课程
4.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解
5.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦
6.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化
7.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)
16.透彻理解视觉ORB-SLAM3:理论基础+代码解析+算法改进
重磅!粉丝学习交流群已成立
交流群主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、ORB-SLAM系列源码交流、深度估计、TOF、求职交流等方向。
扫描以下二维码,添加小助理微信(dddvisiona),一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。

▲长按加微信群或投稿,微信号:dddvisiona
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、源码分享、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答等进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,6000+星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看,3天内无条件退款

高质量教程资料、答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~














 1052
1052











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









