






来源丨人工智能机器人ISAIRer
编辑丨极市平台
3D点云在自动驾驶、机器人和增强现实等各种应用中表现出巨大的潜力。与2D图像中有规律的像素不同,3D点的排列不规则,这阻碍了直接采用经过充分研究的2D网络来处理3D数据。因此,探索适合三维点云数据的先进方法势在必行。然而,目前以三维为中心的方法通常需要从头开始的完全监督训练,这需要劳动密集型的人工注释。在自然语言处理(NLP)和图像分析领域,自监督学习(SSL)已经成为一种获取潜在表示的不依赖注释的方法。在这些方法中,生成式预训练Transformer(GPT)在学习代表性特征方面特别有效,其任务是以自回归的方式预测数据。由于其出色的性能,自然会提出这样一个问题:GPT能否适应点云,并作为一个有效的三维表示学习器?
论文解读
摘要
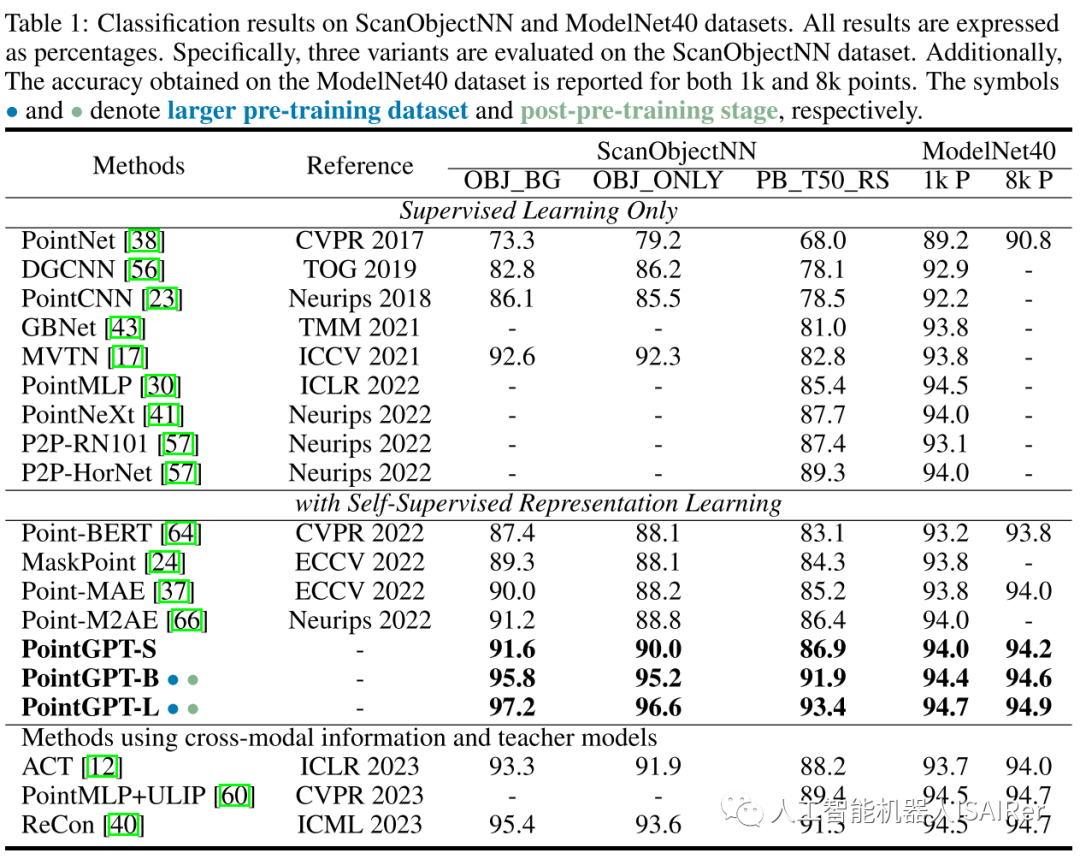
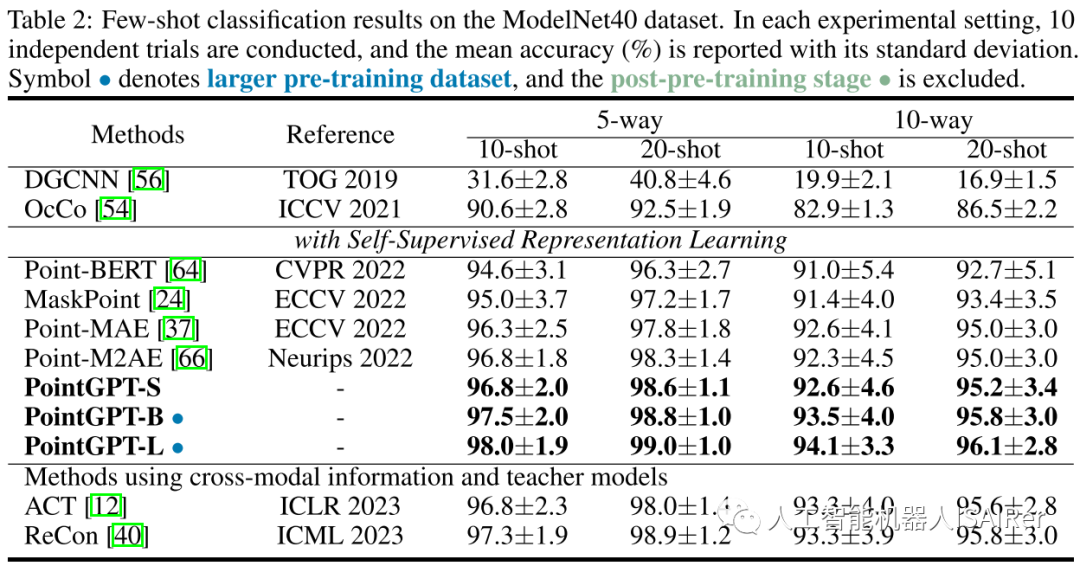
这篇论文介绍了一种名为PointGPT的方法,将GPT的概念扩展到了点云数据中,以解决点云数据的无序性、低信息密度和任务间隔等挑战。论文提出了一种点云自回归生成任务来预训练Transformer模型。该方法将输入的点云分割成多个点块,并根据它们的空间接近性将它们排列成有序序列。然后,基于提取器-生成器的Transformer解码器(使用双重掩码策略)学习了在前序点块条件下的潜在表示,以自回归方式预测下一个点块。这种可扩展的方法可以学习到高容量模型,具有很好的泛化能力,在各种下游任务上实现了最先进的性能。具体来说,该方法在 ModelNet40数据集上实现了94.9%的分类准确率,在ScanObjectNN数据集上实现了93.4%的分类准确率,超过了所有其他Transformer模型。此外,该方法还在四个小样本学习基准测试上获得了新的最先进准确率。
论文链接:https://arxiv.org/pdf/2305.11487.pdf
代码链接:https://github.com/CGuangyan-BIT/PointGPT
论文贡献
1.提出了一种名为PointGPT的新型GPT模型用于点云自监督学习(SSL)。PointGPT利用点云自回归生成任务,同时减轻了位置信息泄漏的问题,在单模态自监督学习方法中表现出色。
2.提出了一种双重掩码策略来创建有效的生成任务,并引入了提取器-生成器Transformer架构来增强学习表示的语义级别。这些设计提高了PointGPT在下游任务中的性能。3.引入了一个预训练后阶段,并收集了更大的数据集,以促进高容量模型的训练。利用PointGPT,本文的扩展模型在各种下游任务上实现了最先进的性能。
总体框架
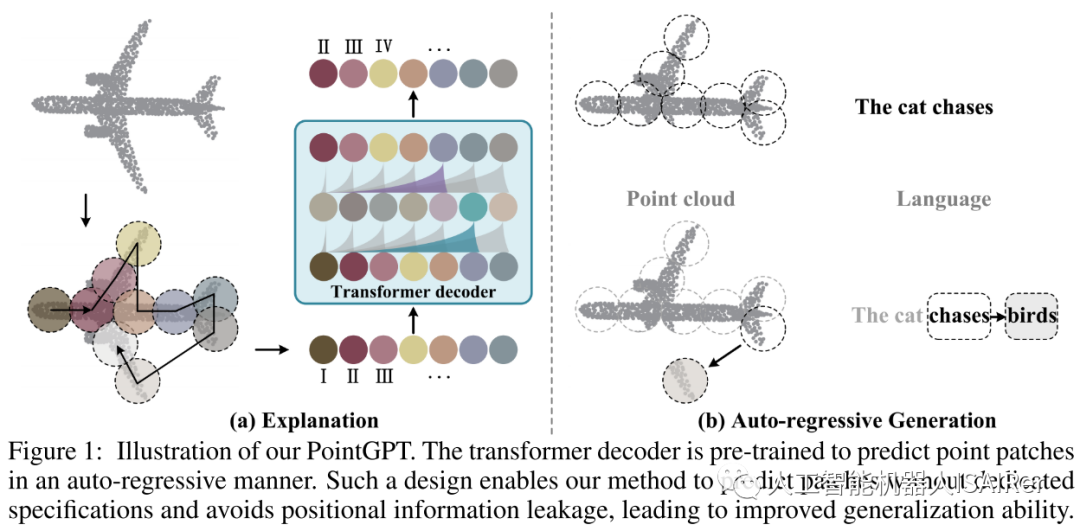
PointGPT方法的示意图如图1所示。输入的点云被分割成多个点块,并按照它们的空间接近性排列成一个有序序列。这个序列被输入到 Transformer解码器中,解码器根据之前预测的点块来预测下一个点块。这种自回归的方式使得模型能够逐步生成点块,并且模型可以利用之前生成的点块来预测下一个点块。通过这种方式,PointGPT的方法能够在没有专门指定点块的情况下进行预测,并且避免了位置信息泄漏的问题,从而提高了模型的泛化能力。这种方法的优势在于能够处理点云数据的无序性,并且在各种下游任务上表现出较好的性能。
1.点云序列模块
PointGPT的预训练流程包括使用点云序列模块构建有序的点块序列,提取器学习点块的潜在表示,生成器自回归生成点块序列。在预训练后阶段,生成器被舍弃,提取器利用学习到的表示进行下游任务。这个流程旨在通过自回归生成任务来学习点云数据的特征表示,并为后续任务提供更好的表示能力。
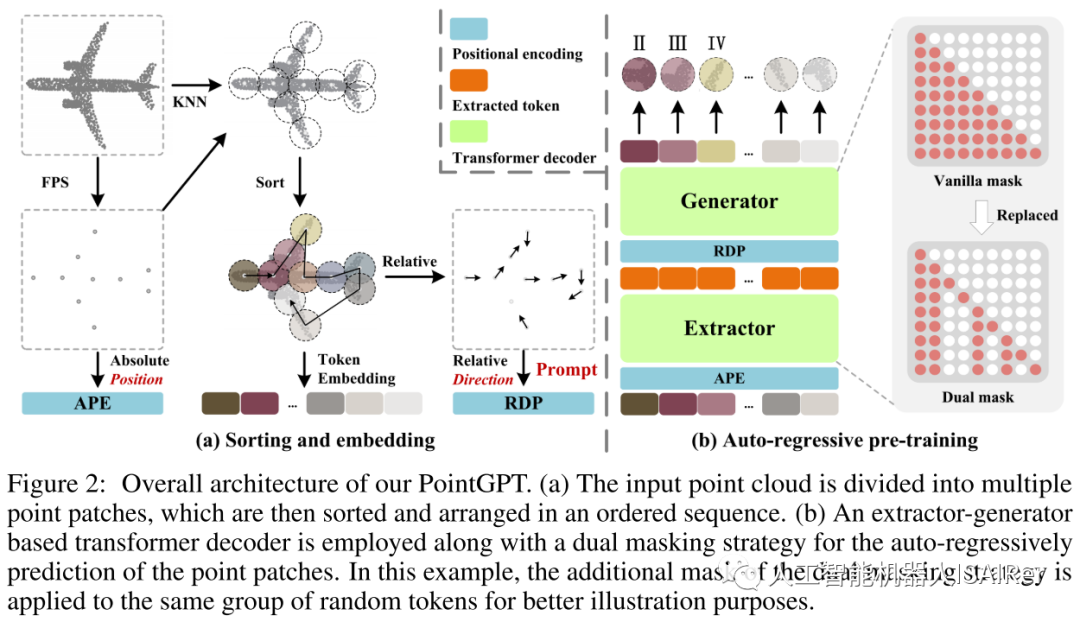
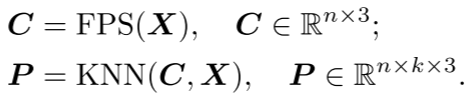
点块分割:该阶段将点云划分为不规则的点块。通过将点云分割成块状的子集,可以将点云的结构分解成更小的部分,以便更好地进行处理。考虑到点云的固有稀疏性和无序性,输入点云通过最远点采样(FPS)和K近邻(KNN)算法处理,以获取中心点和点块。
排序:为了解决点云的固有无序性,获得的点块根据它们的中心点被组织成一个连贯的序列。具体而言,使用Morton编码将中心点的坐标编码到一维空间中,然后进行排序以确定这些中心点的顺序。然后,将点块按照相同的顺序排列。

嵌入:在PointGPT中,采用了嵌入(Embedding)步骤来提取每个点块的丰富几何信息。排序后的点块序列被嵌入到模型中,用于后续的预训练和任务学习。嵌入可以将点块的几何信息转化为模型能够理解和处理的向量表示。这里使用了PointNet网络来进行几何信息的提取。

2.提取器-生成器Transformer架构
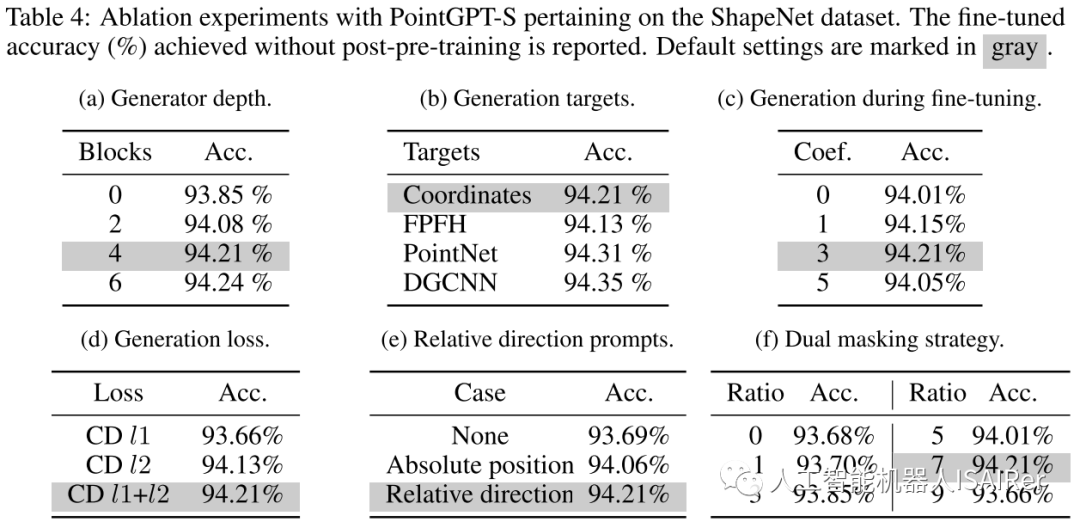
双重掩码策略:Transformer解码器中的基本掩码策略使得每个token都可以从所有前面的点token中接收信息。为了进一步促进有用表示的学习,提出了双重掩码策略,该策略在预训练期间还会额外屏蔽每个token所参考的一定比例的前置token。所得的双重掩码如图2(b),具有双重掩码策略的自我注意过程可以表示为:

其中,Q、K、V是T用D个通道的不同权重进行编码的。将中的经掩码位置设定为0,而将未经掩码位置设定为1。
提取器:提取器完全由Transformer解码器块组成,并采用双重掩码策略,得到潜在表示。用正弦位置编码(PE)将排序的中心点的坐标映射到绝对位置编码(APE)。

生成器:生成器的架构与提取器类似,但包含较少的Transformer块。它以提取的 作为输入, 并生成用于后续预测头的点 。然而,由于中心点采样过程可能会影响点块的顺序,这在预测后续点块时会引入不确定性。这使得模型难以有效地学习有意义的点云表示。为了解决这个问题,在生成器中加入了中心点之间的相对方向提示(RDP),提供了相对于后续点块的方向信息,作为提示而不暴露被掩码的点块的位置和整体点云对象的形状。
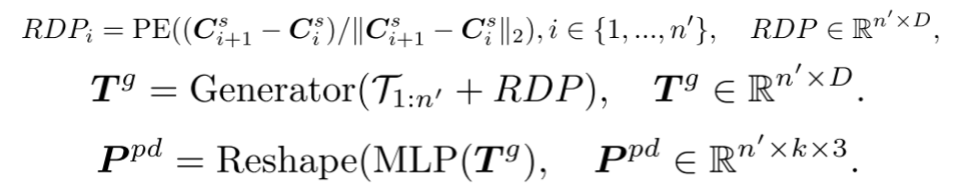
预测头: 预测头用于在坐标空间中预测后续的点块。它由一个两层的多层感知机(MLP)组成,包含两个全连接(FC)层和(ReLU)激活函数。预测头将token 投影到向量空间,其中输出通道的数量等于一个点块中的坐标总数。然后,这些向量被重新组织成预测的点块。

3.中间微调和预训练后阶段
传统的点云自监督学习(SSL)方法直接在目标数据集上微调预训练模型,由于语义监督信息有限,这可能导致潜在的过拟合问题。为了缓解这个问题并便于训练高容量模型,PointGPT采用了中间微调策略,并引入了一个预训练后的阶段。在这个阶段中,使用一个带标签的混合数据集进行训练,该数据集收集和对齐了多个带标签的点云数据集。通过在这个数据集上进行监督训练,可以有效地从多个来源合并语义信息。随后,在目标数据集上进行微调,将学到的通用语义知识转移到任务特定的知识上。这种中间微调和预训练后阶段的策略有助于提高模型的泛化能力,避免潜在的过拟合问题,并利用多样化的语义信息来提升模型的性能。
实验结果
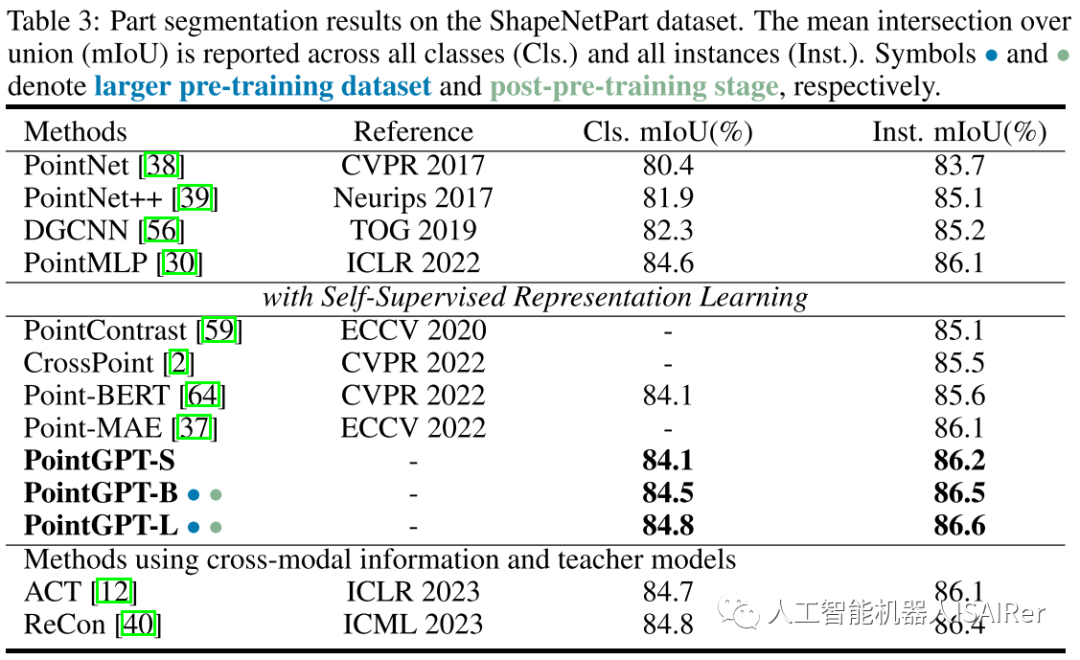
为了展示PointGPT在不同下游任务上的性能,本文进行了一系列实验,包括真实世界和干净对象数据集上的物体分类、少样本学习和部分分割。使用三种不同的模型容量来评估PointGPT的性能:PointGPT-S是指在ShapeNet数据集上进行预训练但不进行预训练后阶段;PointGPT-B和PointGPT-L,在收集的混合数据集上进行预训练和预训练后阶段。
PointGPT-S在ShapeNet数据集上进行预训练,而无需后续的后预训练。这与前面的SSL方法是一致的,以便与前面的方法进行直接比较。另外,为了支持高容量PointGPT模型(PointGPT-B和PointGPT-L)的训练,收集了两个数据集:(1)用于自监督预训练的无标记混合数据集(UHD),从各种数据集中收集点云,例如用于室内场景的ShapeNet、S3DIS和用于室外场景的Semantic3D等。UHD总共包含大约300K点云; (2)用于有监督后预训练的标记混合数据集(LHD),它将不同数据集的标记语义对齐,共有87个类别和大约200k个点云。
结论&讨论
本文介绍了PointGPT,这是一种将GPT概念扩展到点云领域的新方法,解决了点云的无序性、信息密度差异和生成任务与下游任务之间的差距等挑战。与最近提出的自监督遮蔽点建模方法不同,本文的方法避免了整体物体形状泄漏,具有更好的泛化能力。此外,本文还探索了高容量模型的训练过程,并收集了用于预训练和预训练后阶段的混合数据集。本文的方法在各种任务上验证了其有效性和强大的泛化能力,表明PointGPT在模型容量相似的单模态方法中表现优异。此外,本文的大规模模型在各种下游任务上取得了SOTA的性能,无需跨模态信息和教师模型的参与。尽管PointGPT表现出了良好的性能,但其探索的数据和模型规模仍然比NLP和图像处理领域小几个数量级。
—END—高效学习3D视觉三部曲
第一步 加入行业交流群,保持技术的先进性
目前工坊已经建立了3D视觉方向多个社群,包括SLAM、工业3D视觉、自动驾驶方向,细分群包括:[工业方向]三维点云、结构光、机械臂、缺陷检测、三维测量、TOF、相机标定、综合群;[SLAM方向]多传感器融合、ORB-SLAM、激光SLAM、机器人导航、RTK|GPS|UWB等传感器交流群、SLAM综合讨论群;[自动驾驶方向]深度估计、Transformer、毫米波|激光雷达|视觉摄像头传感器讨论群、多传感器标定、自动驾驶综合群等。[三维重建方向]NeRF、colmap、OpenMVS等。除了这些,还有求职、硬件选型、视觉产品落地等交流群。大家可以添加小助理微信: dddvisiona,备注:加群+方向+学校|公司, 小助理会拉你入群。

第二步 加入知识星球,问题及时得到解答
3.1 「3D视觉从入门到精通」技术星球
针对3D视觉领域的视频课程(三维重建、三维点云、结构光、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、源码分享、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答等进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业、项目对接为一体的铁杆粉丝聚集区,6000+星球成员为创造更好的AI世界共同进步,知识星球入口:「3D视觉从入门到精通」
学习3D视觉核心技术,扫描查看,3天内无条件退款
3.2 3D视觉岗求职星球
本星球:3D视觉岗求职星球 依托于公众号「3D视觉工坊」和「计算机视觉工坊」、「3DCV」,旨在发布3D视觉项目、3D视觉产品、3D视觉算法招聘信息,具体内容主要包括:
收集汇总并发布3D视觉领域优秀企业的最新招聘信息。
发布项目需求,包括2D、3D视觉、深度学习、VSLAM,自动驾驶、三维重建、结构光、机械臂位姿估计与抓取、光场重建、无人机、AR/VR等。
分享3D视觉算法岗的秋招、春招准备攻略,心得体会,内推机会、实习机会等,涉及计算机视觉、SLAM、深度学习、自动驾驶、大数据等方向。
星球内含有多家企业HR及猎头提供就业机会。群主和嘉宾既有21届/22届/23届参与招聘拿到算法offer(含有海康威视、阿里、美团、华为等大厂offer)。
发布3D视觉行业新科技产品,触及行业新动向。

第三步 系统学习3D视觉,对模块知识体系,深刻理解并运行
如果大家对3D视觉某一个细分方向想系统学习[从理论、代码到实战],推荐3D视觉精品课程学习网址:www.3dcver.com
科研论文写作:
基础课程:
[1]面向三维视觉算法的C++重要模块精讲:从零基础入门到进阶
[2]面向三维视觉的Linux嵌入式系统教程[理论+代码+实战]
工业3D视觉方向课程:
[1](第二期)从零搭建一套结构光3D重建系统[理论+源码+实践]
SLAM方向课程:
[1]深度剖析面向机器人领域的3D激光SLAM技术原理、代码与实战
[2]彻底剖析激光-视觉-IMU-GPS融合SLAM算法:理论推导、代码讲解和实战
[3](第二期)彻底搞懂基于LOAM框架的3D激光SLAM:源码剖析到算法优化
[4]彻底搞懂视觉-惯性SLAM:VINS-Fusion原理精讲与源码剖析
[5]彻底剖析室内、室外激光SLAM关键算法和实战(cartographer+LOAM+LIO-SAM)
视觉三维重建:
自动驾驶方向课程:
[1] 深度剖析面向自动驾驶领域的车载传感器空间同步(标定)
[2] 国内首个面向自动驾驶目标检测领域的Transformer原理与实战课程
[4]面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
[5]如何将深度学习模型部署到实际工程中?(分类+检测+分割)
无人机:
[1] 零基础入门四旋翼建模与控制(MATLAB仿真)[理论+实战]


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









