







BLDC电机驱动MCU
涉及峰岹、凌欧、中颖等,还有灵动微、华大、华芯微特等;国外有TI、ST。
PWM模块和PWMT模块对照ST的高级定时器和通用定时器功能,相关功能见笔者发表的CSDN博客:(1条消息) PWM与PWMT_Yuule的博客-CSDN博客
详情采访记录可见附件《关于BLDC电机驱动MCU的系列问题》
详情算法说明可见附件《BLDC&PMSM算法说明》
git开源项目iBLDC iBLDC/BLDC的六步法&PMSM的FOC法综合.md at master · Staok/iBLDC (github.com)
电机驱动架构
方案
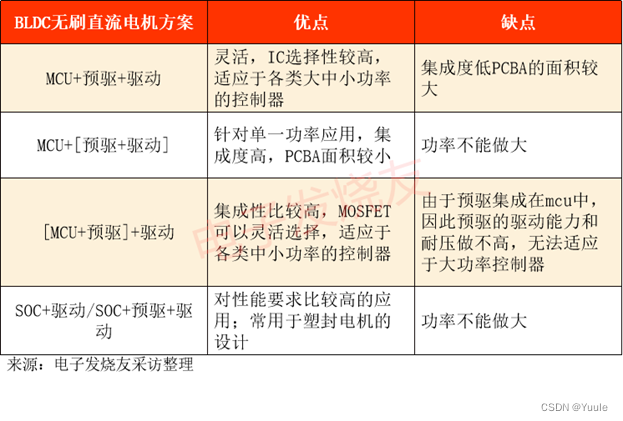
一般的电机驱动方案如下表所示,
框架
根据上表的电机方案,
按照MCU硬件架构分类可以分成两类,一类是带驱动,另一类是不带驱动。
其中带驱动的还有三类详细划分,分别是GATE/3P3N/6N,下图以凌欧和邵峰MCU示例,
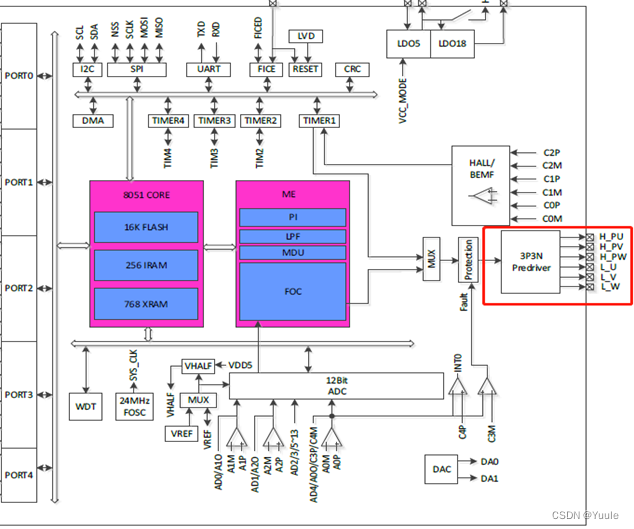 图 邵峰FU6832
图 邵峰FU6832
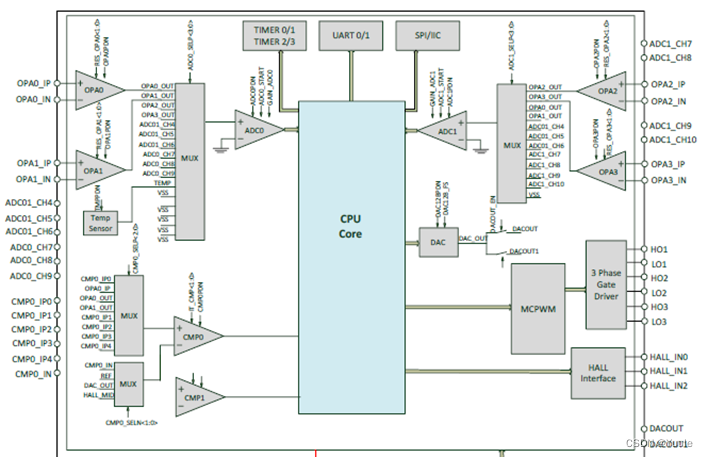 图 凌欧LKS32MC066
图 凌欧LKS32MC066
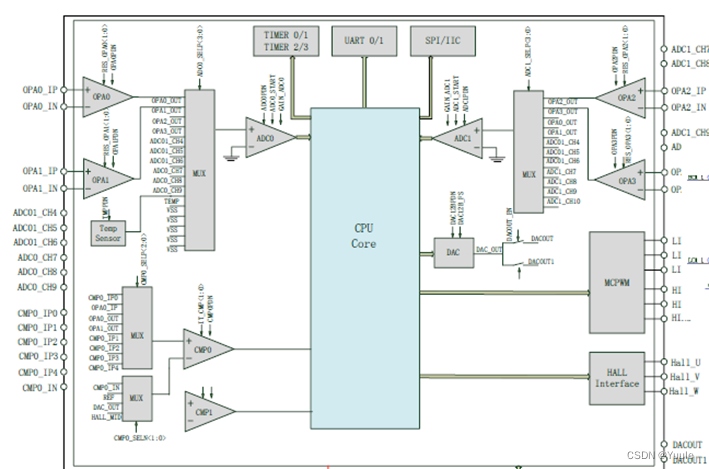 图LKS32MC061
图LKS32MC061
详情见下表对比,由于各家芯片较多仅选取部分具有代表性的MCU。
表1
| 所属公司 | 带驱动MCU | 不带驱动MCU | 备注 |
| CCORE |
| CCM4201s |
|
| 峰岹 | FU6831、FU6832 (3P3N) |
| Gate/3P3N/6N都有,被选MCU正好是3P3N |
| 凌欧 | LKS32MC066 (Gate) | LKS32MC062 LKS32MC061 LKS32AT085(车规) | 虽无驱动,但有适用于电机驱动的相关接口,HALL接口等 |
| 中颖 | SH33F2811 (Gate) | SH32F205 SH79F2202A | 虽无驱动,但有算法SVPWM加速单元,QEI接口(正交编码器) |
| 灵动微 | MM32SPIN422C MM32SPIN360C (Gate) | MM32SPIN0280 |
|
| 华大 |
| HC32M120 HC32M140 |
|
| 华芯微特 |
| SWM190 SWM201 | 无驱动,有算法加速模块,QEI接口 |
| ST | STSPIN32F0 (Gate) | 多种 | 顶端方案及算法库 |
| TI |
| TMS320F28002x (DSP) | 顶尖方案和算法 |
| 松下 | - | - | 无MCU产品,为驱动类IC模块 |
芯片资源对比
详情见excel《BLDC电机驱动芯片资源》
仅对比BLDC需要使用的硬件资源及主要的芯片性能。
电机
电机种类非常丰富,可以按照工作电源种类、用途以及结构和工作原理划分,详情见下图,
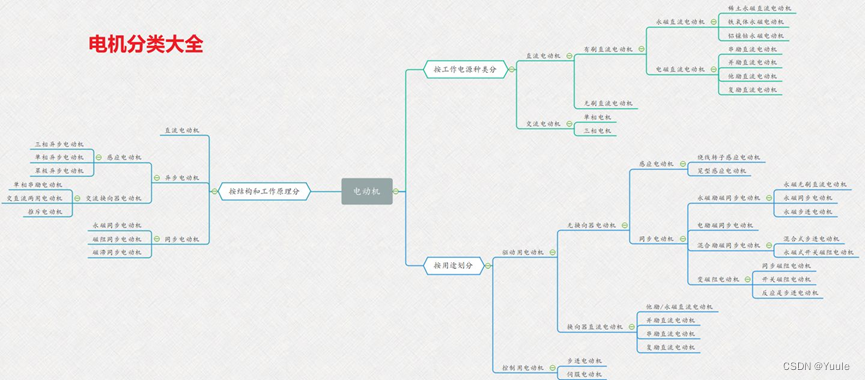 图 电机分类
图 电机分类
随着技术进步,目前主流技术是无刷电机,这里主要关注无刷直流电机BLDCM和永磁同步电机PMSM。
结构
BLDCM与PMSM电机在基本架构上是相同的,他们都具有转子永磁体,定子绕组;且由转子与定子的相互作用产生电机转矩,根据右手螺旋定则,通过线圈绕组方向和电流方向可以判断线圈磁极方向,但在细节设计和控制上存在区别。
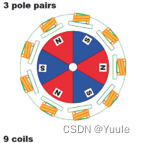
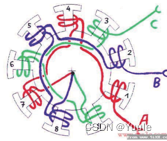
图 无刷电机结构转子定子(左9绕组3极对数电机)
BLDCM起初是用于替代有刷电机,自然的驱动方式也是方波控制,于是为了最大化利用其特性,电机转子会设计成有方波磁场的、径向距离相等的等厚磁铁。于是电机的反电动势会趋于梯形波。
PMSM以正弦波驱动,为了最大化正弦波利用率,电机磁场会被设计为正弦波磁场(这里我们不展开讨论气隙磁场、磁密谐波),反电动势也随之具有正弦性。
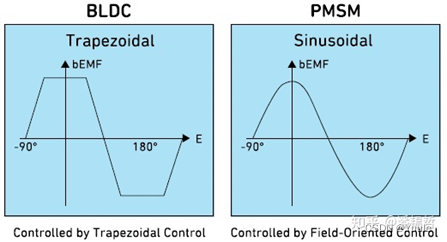
图 梯形波反电动势/正弦波反电动势
PWM与驱动算法
PWM介绍
脉冲宽度调制,PWM调制方式有很多种,后续在<电机应用和算法>中关注电机控制中主流的三种即方波调制,SPWM和SVPWM。
普通的PWM,通过递增/递减计数器,可根据需求生成不同占空比的方波。
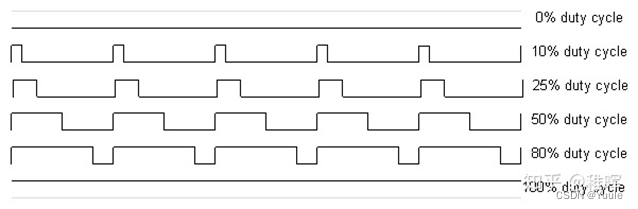
图 不同占空比PWM
互补PWM输出,一对互补PWM可输出两组占空比互补的方波,示例如下图,
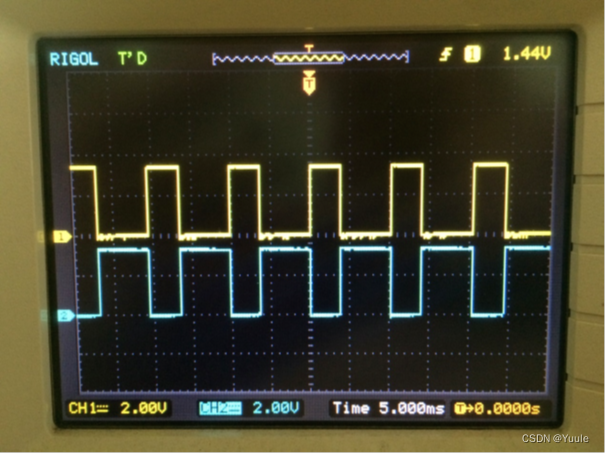
图 互补输出PWM
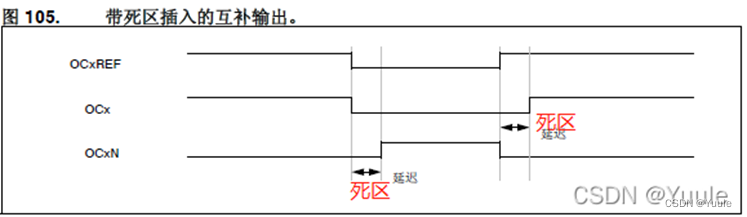 图 带死区的互补PWM
图 带死区的互补PWM
算法&PWM调制方式
可见附件《BLDC&PMSM算法说明》或框架图片目录下图片说明。
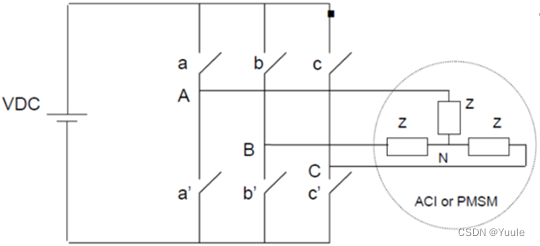
图 三相逆变电路
120°调制方波
利用霍尔值(每个电气周期6次变化),改变UVW相电流流向,但同一霍尔值内电流流向不变,任何时刻只能一相的上桥和另一相的下桥导通,这种控制方式简单,但存在最大60度的转矩偏角,效率降低,同时会伴有转动噪音。
当然我们可以通过增加绕组和极对数来减小上述提到的60°颗粒感。
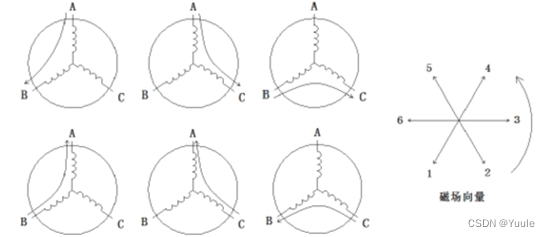
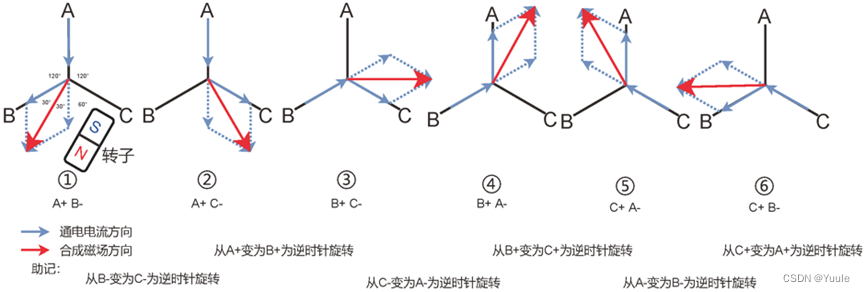
图 绕组6种磁场方向
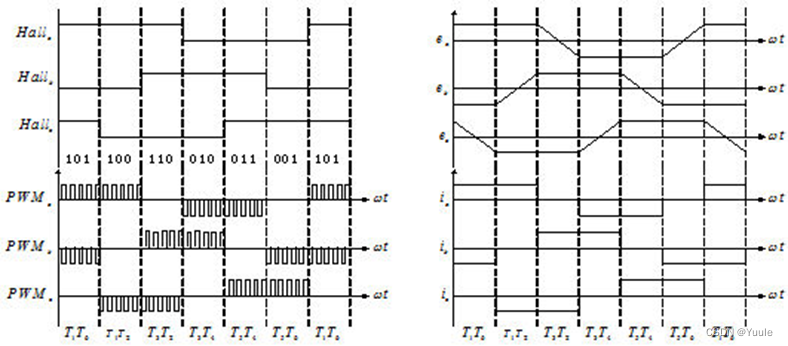 图 HALL状态、PWM、三相反电动势、三相电流
图 HALL状态、PWM、三相反电动势、三相电流
这里PWM的驱动方式存在两种,1是互补设输出,2是单极输出,这就导致了在实际驱动BLDCM时存在几种斩波方式。
SPWM三角波调制
通过三角载波与调制波的比较,确定SPWM波形。其与SVPWM方式一样,是为了得到具有正弦规律变化的方波。
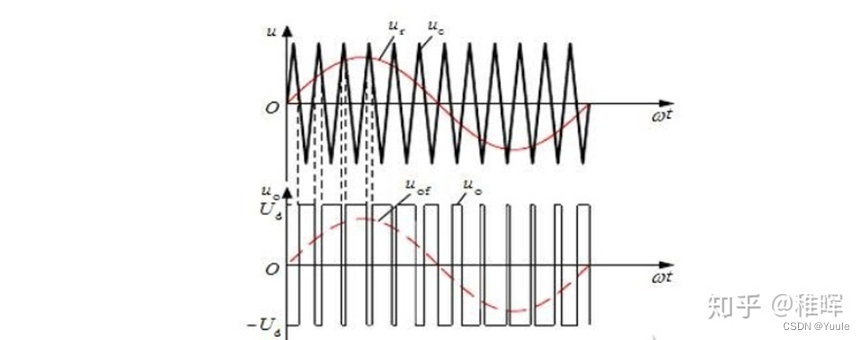 图 PWM等效正弦
图 PWM等效正弦
但是SPWM调制方式在FOC磁场定向控制中不常用(实际上这是一种相电压控制方式),原因是SPWM要比SVPWM母线电压利用率低15%左右,见下图。
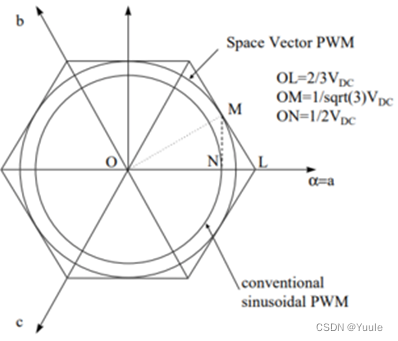
图 SVPWM与SPWM比较
SVPWM空间矢量调制
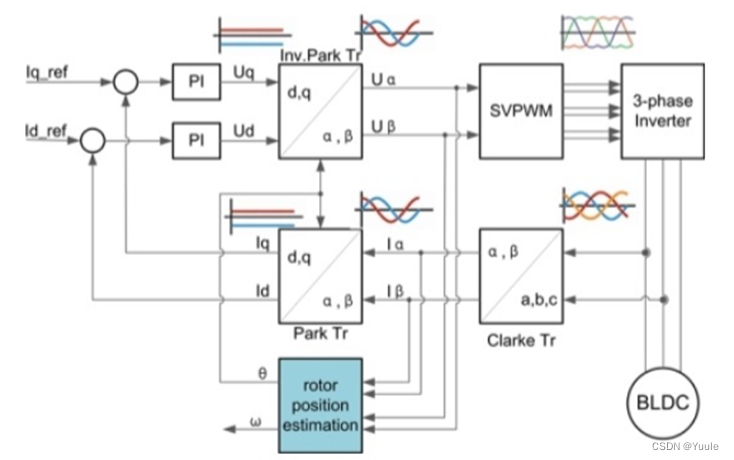 图 控制流程
图 控制流程
- 对电机三相电流进行采样得到 Ia,Ib,Ic
- 将Ia,Ib,Ic 经过 Clark变换 得到 Iα,Iβ
- 将Iα,Iβ经过Park变换得到Id,Iq
- 计算Id,Iq和其设定值Id_ref,Iq_ref的误差
- 将上述误差输入两个PID(只用到PI)控制器,得到输出的控制电压 Uq,Ud
- 将Uq,Ud进行反Park变换得到Uα,Uβ
- 用Uα,Uβ合成电压空间矢量,输入SVPWM模块进行调制,输出该时刻三个半桥的状态编码值(见下图表)
- 按照前面输出的编码值控制三相逆变器的MOS管开关,驱动电机
- 循环上述步骤
表 cba状态编码即相/线电压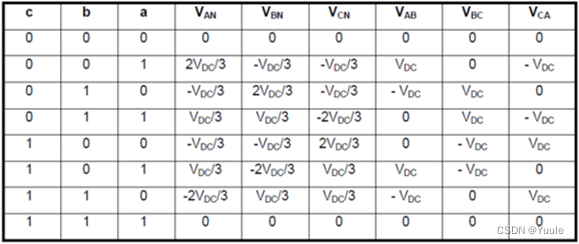
PMSM的matlab仿真
三相逆变桥上半桥状态matlab仿真波形,详情见simulink模型<PMSM_FOC>
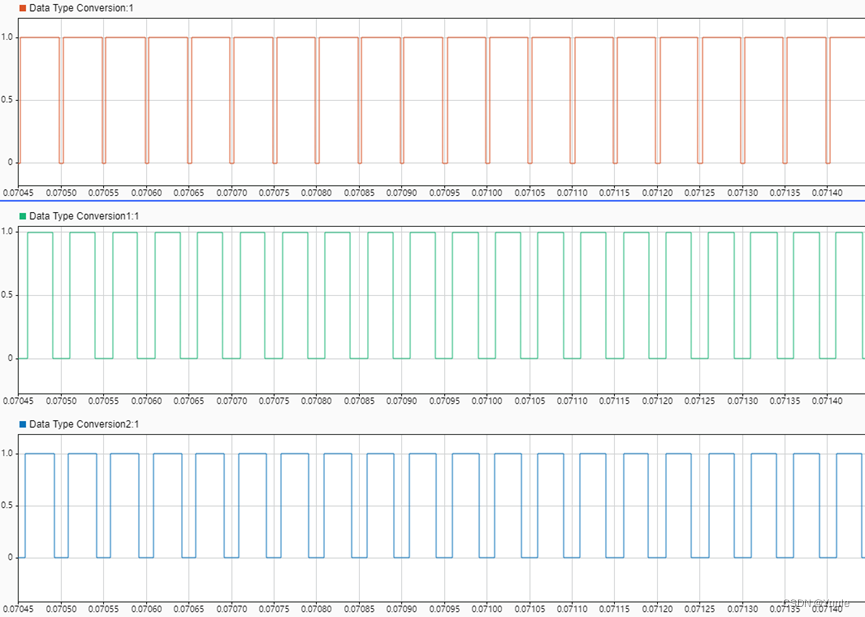 图 SVPWM上半桥仿真波形示例
图 SVPWM上半桥仿真波形示例
电机应用
在电机控制中,我们需要知道三个电机基本信息:1、三相电流;2、电角度;3、转子转速。
三相电流测量方案:
1、霍尔元件;2、电流互感器;3、采样电阻(低成本 电阻+运放,低端采样分三双单电阻采样)
电角度测量方案:
1、磁编码器;2、霍尔元件;3、观测器
转子转速测量方案:
1、编码器;2、由电角度估算
三相电流测量
霍尔传感器
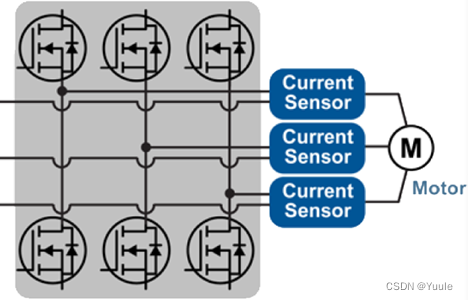
图 三霍尔传感器测量三相电流
一般使用两个即可,通过KCL,Ia+Ib+Ic = 0,可以求解第三个相电流。
电流互感器(相当于变压器)
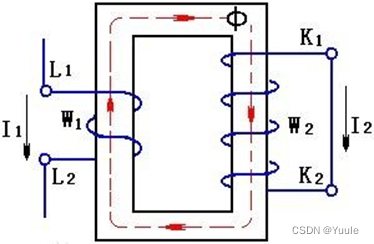
图 电流互感器测量
采样电阻
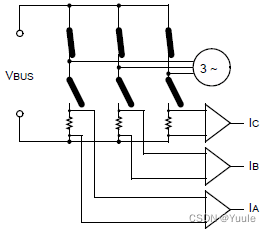
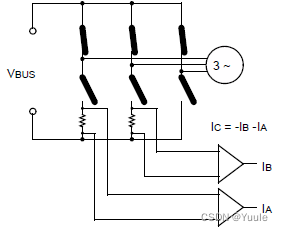
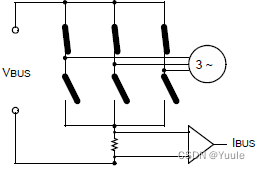
图 低端电阻采样方式
电角度测量
霍尔传感器+旋转编码器
一TI C2000MCU为例,通过霍尔传感器三个信号估算初始位置,然后通过旋转编码器的Z相同步信号,消除累计误差。解决这两个问题后,可以直接读取寄存器QPOSCNT寄存器的计数来确定任意时刻的绝对位置。
转子转速测量
旋转编码器
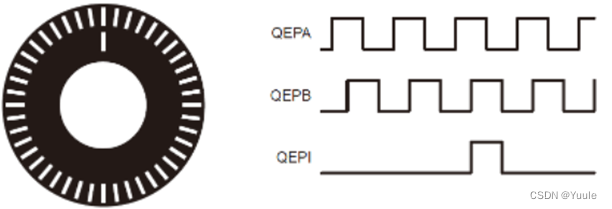
图 旋转编码器结构及信号输出
通过两种方式计算转速,
1 固定时间,测量脉冲数。
2 固定脉冲,数测量所需时间。
电机驱动应用公司研发人员访谈
详情见《关于BLDC电机驱动MCU的系列问题》
赛亿:主频100M左右,eflash一般的不会超过256KB,sram一般在32K左右;需要6路PWM(3组带死区和互补功能),3路ADC,3路比较器和3路放大器。
某公司:必要6路互补PWM,2路定时器/计数器,adc,2个amp,2个CMP
附录
电机名词解释及公式
1 转矩:一种力矩,电机中又可称扭矩,单位 N·m
公式 转矩T = F · r (力 × 力臂)
2 转速:电机每分钟转圈数,单位 r/min。
力臂上某点的速度:V = ω · r ( 角速度 × 某点力臂),单位 rad/s。弧度制V 与转速N 的相互转化:ω = (2pi / 60)· N
3 功率:P = F·V = T·ω = a·T·N
4 绕组反电动势:源自感生电动势,即永磁体转动线圈的磁场产生变化,产生感应电动势。根据楞次定律(感应电流的磁场总要阻碍引起感应电流的磁通量的变化)判断。
感生电动势,E = n·△Φ/△t
磁通量:Φ = B·S·cosθ(B是磁感应强度,S是线圈平面面积,θ是线圈平面法线与磁感应强度B的夹角)
5 载波比:mf为三角载波信号频率fc与正弦调制波信号频率f之比,即mf = fc / f
6 调制深度:mm为正弦调制信号幅值Vm与三角波信号幅值Vsm之比,即mm = Vm / Vsm
7 斩波:又称DC-DC变换,指将一数值的直流电压变为零一数值的直流电压。
PID介绍
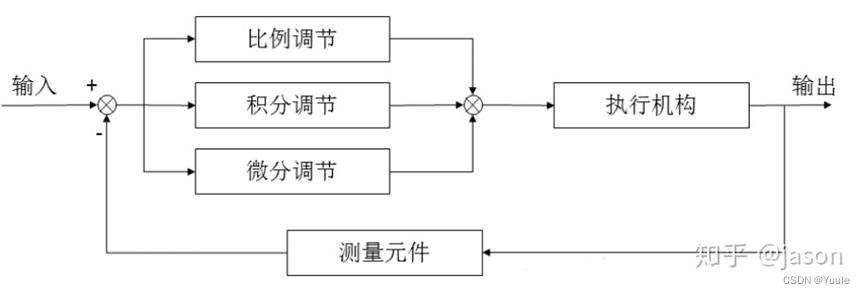 图 PID控制框图
图 PID控制框图
公式介绍:

图 连续公式

图 离散公式
Kp-------比例常数
Ki= (Kp*T)/Ti------积分常数
Kd=(Kp*Td)/T------微分常数
Clark变换&Park变换
简化PMSM模型,使用禁止坐标系clark变换和同步旋转坐标Park变换
Clark
将自然坐标系abc变换到α-β坐标系
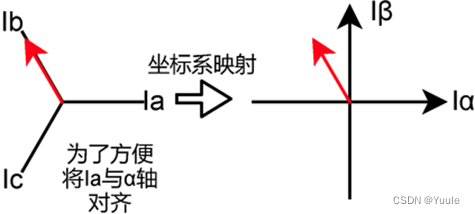
图 clark变换
变换公式如下:
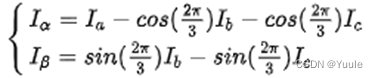
写成矩阵:
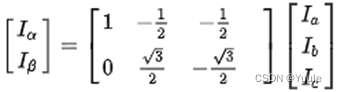
注:上述公式没有考虑约束条件,若变换前后幅值不变需要乘上系数2/3;若变换前后功率不变,系数则为sqrt(2/3)
Park
将静止坐标系α-β 换到同步旋转坐标系d-p
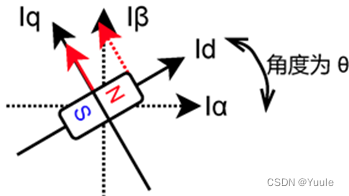
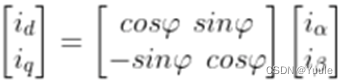
图 park变换
变换矩阵:
反park变换矩阵:
开源项目
Git开源项目详情见:iBLDC/BLDC的六步法&PMSM的FOC法综合.md at master · Staok/iBLDC (github.com)
参考资料:
直流无刷电机与永磁同步电机有什么区别? - 潘韫哲的回答 - 知乎
不看后悔!最全的电机分类,看这一篇就够了! - 知乎 (zhihu.com)
三相对称电流通过向dq坐标轴上投影得到的Id、Iq与通过park变换得到的Id、Iq有什么区别和联系么? - 知乎 (zhihu.com)
无刷直流电机的PWM调制方式介绍-电子工程专辑 (eet-china.com)
为什么脉宽调制能产生正弦波? - 知乎 (zhihu.com)
反电动势到底该如何来理解? - 知乎 (zhihu.com)
【自制FOC驱动器】深入浅出讲解FOC算法与SVPWM技术 - 知乎 (zhihu.com)
详解SPWM与SVPWM的原理、算法以及两者的区别-电源网 (dianyuan.com)
初识PID-搞懂PID概念 - 知乎 (zhihu.com)
永磁同步电机位置检测学习笔记_finhaz的博客-CSDN博客_fast观测器
三相逆变器电流采样方案总结 | 高明飞的博客 (gaomf.cn)


















 992
992

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









