







 文章介绍了母线单电阻电路在电流环中的应用,以及反电动势检测在无感PMSM位置环和速度环中的作用。通过磁链模型和反电动势估算转子位置,讨论了FOC控制策略和电机启动方法,包括高频注入法等其他估算技术。
文章介绍了母线单电阻电路在电流环中的应用,以及反电动势检测在无感PMSM位置环和速度环中的作用。通过磁链模型和反电动势估算转子位置,讨论了FOC控制策略和电机启动方法,包括高频注入法等其他估算技术。
目录
以下图单电阻无感PMSM FOC电路设计为例
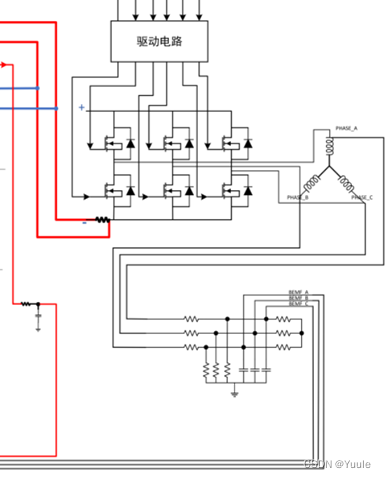
图1 单电阻FOC sensorless典型电路
母线单电阻电路—电流环
以mΩ级别的精密电阻,串联进母线,通过放大器放大单电阻两端的电压信号,计算得出放大后的母线电流起两个目的一是与设定的过流值进行对比,然后处理;二是用于测算功率,用于电机恒功率控制。
反电动势检测电路 (back EMF)—位置环速度环
在BLDC方案中,BEMF检测电路用来进行过零检测。即每一个电压过0点就是一次换向信号,一次换向信号就是60°的角度差,由此可以大致确定速度闭环,简单的过零检测无法确定精确位置。
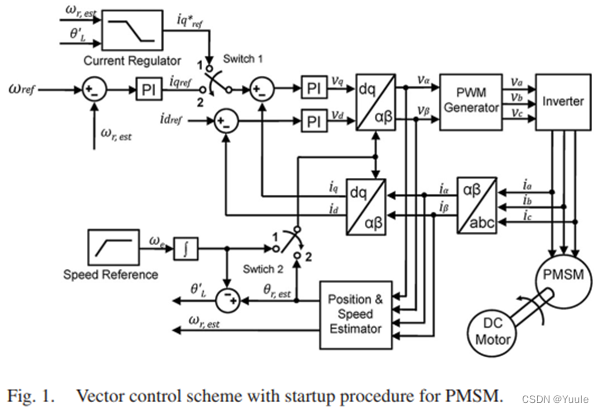
在上图FOC无感方案中,我们可以通过数学模型估算转子位置,下面参考IEEE高引论文《A Simple Startup Strategy Based on Current Regulation for Back-EMF-Based Sensorless Control of PMSM》通过BEMF反电动势检测电路估算转子位置。当然还有很多其他方法,如高频注入法,滑膜观测器法等。其中高频注入算法似乎可以得到精确位置,待后续研究。
这篇文章讲了两个方面,一是传统FOC策略,通过磁链计算转子位置;二是电机启动到FOC控制的策略。我们重点关注如何估算转子位置,以下:

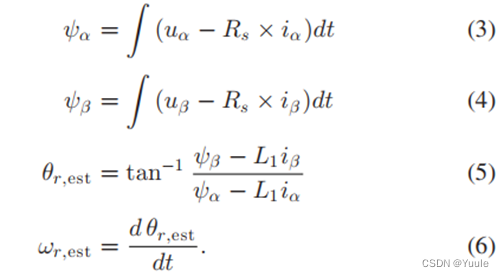
首先是磁链模型,我们可通过式(2)->(5)估算位置。式(2)表示总磁链在静止坐标系α, β下表示为定子磁链+转子磁链。转子磁链包含了转子的位置信息,通过式(5)可求。
其中定子磁链计算为Ls×Id/Iq再经过ipark变换到αβ坐标系。
如上图公式,式(1)电压方程à(3)(4),积分得相应αβ轴磁链ψαψβ。
第二种反电动势模型,将式(2)代入(1)可得:

其中第三部分为电压分量即反电动势,包含了转子角度信息,第二部分描述了定子磁场变化产生的电压和电流关系。
参考
永磁同步电机转子位置估算专题 —— 基波模型类位置估算概要 - 知乎 (zhihu.com)
《A Simple Startup Strategy Based on Current Regulation for Back-EMF-Based Sensorless Control of PMSM》
附录
Ψ磁链,线圈的总磁通量,矢量。(磁通量ø标量)
V,i为相电压和电流
α, β静止坐标系,d-q-旋转坐标系
Θr电角度
Rs定子相电阻
ψmpm转子磁链峰值(永磁体磁链)
L1电感,L1 ≜( Ld + Lq)/2
θr,est估算转子位置
ωr,est估算转子速度
观测器定义为一个数学模型,目的是为了估计系统中未知的部分(状态,参数,扰动或故障),进而依次对应控制(control)、参数辨识(identification)和监测(monitoring)
PLL锁相环
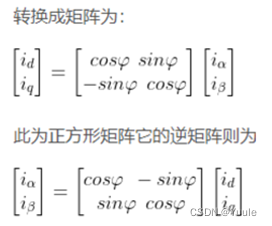
Park变换:
![]()


















 1952
1952

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









