







参考论文:
1.《用非监督式聚类进行视频镜头分割》
2.《一种基于视频聚类的关键帧提取方法》
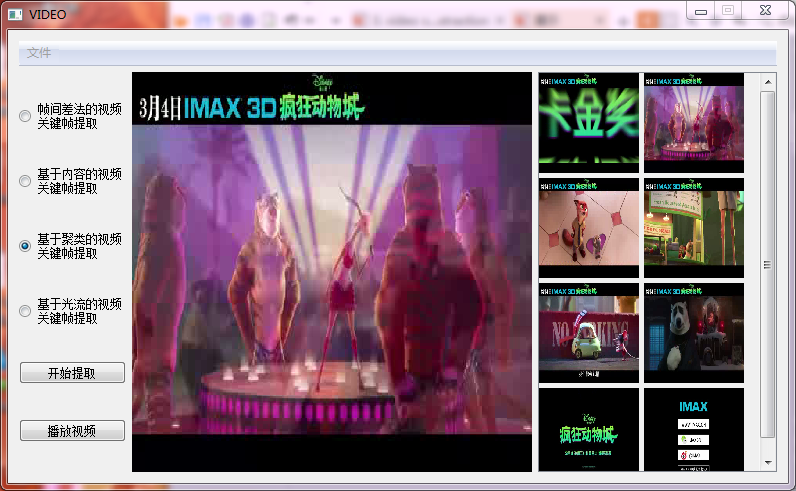
右边为提取出来的关键帧
聚类的基本思想是,先把视频聚成n个类,这n个类内的视频帧是相似的,而类与类之间的视频帧是不相似的。第二步是从每个类内提取一个代表作为关键帧,另外,如果一个类的帧数太少,那么这个类不具有代表性,可以直接与相邻帧合并。
因为HSV空间相比起RGB空间对颜色特性有着更好的支持,所以第一步我们先把颜色映射到HSV空间上。
首先,把分布在0~255的RGB颜色直接映射到0~255的HSV颜色。接下来,我们对HSV颜色再进行一次分割,即把H分量等分为12块,S,V分量各等分为5块,再把原来范围在0 ~255的颜色映射到12X5X5的范围上。
完成映射后,接下来需要构建HSV的颜色空间。我们设图像的大小为为MXN。然后分别统计H,S,V分量中,值为i的占的百分比为多少。
计算两张图像的相似度,需要我们先分别计算三个颜色直方图的相似性,具体的计算方法是累加两张图像直方图相同索引处对应的最小值。

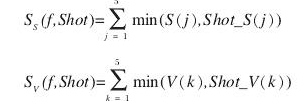
又因为人眼对H分量的敏感程度大于对S分量,而对S分量的敏感程度又大于对V分量,所以最终我们设H的权重为0.5,S为0.3,V为0.2。
接下来,开始具体的计算。
1.对于每个类,维护一个质心:

2.对于每一帧,计算它聚类质心的相似度(根据前面提到的相似度公式)
如果相似度小于某一阈值,那么把它归到一个新建的类中,否则加入之前的类中。
3.合并一部分过小的聚类。
4.计算每个聚类中熵最大的图像,将其作为关键帧,计算方法:

#include <opencv2/opencv.hpp>
#include<string>
#include<io.h>
#include<list>
#include<array>
using namespace std;
using namespace cv;
#define NUM_FRAME 300
#define SIZE 7
char path[100];//输入文件路径
struct shot
{
list<array<float, 22> >content;
list<int> id;
array<float, 22> center;
};
float similarity(array<float, 22> x1, array<float, 22> x2)
{
float s1 = 0, s2 = 0, s3 = 0;
float alpha1 = 0.5, alpha2 = 0.3, alpha3 = 0.2;
for (int i = 0; i < 12; i++) {
s1 += min(x1[i], x2[i]);
}
for (int i = 12; i < 17; i++) {
s2 += min(x1[i], x2[i]);
}
for (int i = 17; i < 22; i++) {
s3 += min(x1[i], x2[i]);
}
return s1*alpha1 + s2*alpha2 + s3*alpha3;
}
int findMaxEntropyId(list<array<float, 22> >x,list<int> y)
{
float s1,s2,s3,max;
list<array<float, 22> >::iterator it;
list<int>::iterator i = y.begin();
int id = 0;
for (it = x.begin(); it != x.end(); it++,i++) {
s1 = 0.0f, s2 = 0.0f, s3 = 0.0f, max = 0.0f;
for (int j = 0; j < 12; j++) {
if ((*it)[j] != 0)s1 += -(*it)[j] * log((*it)[j])/log(2);
}
for (int j = 12; j < 17; j++) {
if ((*it)[j] != 0)s2 += -(*it)[j] * log((*it)[j])/log(2);
}
for (int j = 17; j < 22; j++) {
if ((*it)[j] != 0)s3 += -(*it)[j] * log((*it)[j])/log(2);
}
float s = 0.5f*s1 + 0.3f*s2 + 0.2f*s3;
//printf("s = %f\n", s);
if (s>max) {
max = s;
id = *i;
}
}
return id;
}
const array<float, 22> operator +(const array<float, 22> &x, const array<float, 22> &y)
{
array<float, 22>ans;
for (int i = 0; i < 22; i++) {
ans[i] = x[i] + y[i];
}
return ans;
}
const array<float, 22> operator /(const array<float, 22> &x, int s)
{
array<float, 22>ans;
for (int i = 0; i < 22; i++) {
ans[i] = x[i] / s;
}
return ans;
}
void combine(vector<shot>& Shot, int i, int j)
{
list<array<float, 22> >::iterator it;
list<int>::iterator k = Shot[j].id.begin();
vector<shot>::iterator v = Shot.begin() + j;
for (it = Shot[j].content.begin(); it != Shot[j].content.end(); it++,k++) {
Shot[i].content.push_back(*it);
Shot[i].center = *it + Shot[i].center;
Shot[i].id.push_back(*k);
}
Shot.erase(v);
}
array<float, 22> sum(list<array<float, 22> >& arr)
{
array<float, 22> ans = { 0 };
list<array<float, 22> >::iterator it;
for (it = arr.begin(); it != arr.end(); it++) {
for (int i = 0; i < 22; i++) {
ans[i] += (*it)[i];
}
}
return ans;
}
//将图片序列转换为视频
void handleVideo()
{
int i = 0;
IplImage* img = 0;//读入图像
IplImage* outimg = 0;//修改图像尺寸
char image_name[100];//图像名字
char videoname[100];
strcpy(videoname, "1.avi");
//从文件读入视频
CvCapture* capture = cvCaptureFromAVI(videoname);
//读取和显示
IplImage* frameimg;//从视频中提取的帧图像
int fps = (int)cvGetCaptureProperty(capture, CV_CAP_PROP_FPS);//视频的fps
int frameH = (int)cvGetCaptureProperty(capture, CV_CAP_PROP_FRAME_HEIGHT);//视频的高度
int frameW = (int)cvGetCaptureProperty(capture, CV_CAP_PROP_FRAME_WIDTH);//视频的宽度
printf("\tvideo height : %d\n\tvideo width : %d\n\tfps : %d\n", frameH, frameW, fps);
list<array<float, 22> >colorbar;
//创建窗口
cvNamedWindow("mainWin", CV_WINDOW_AUTOSIZE);
//读入图片,并制作幻灯片
while (1)
{
frameimg = cvQueryFrame(capture); //获取一帧图片
if (!frameimg)break;//读到尽头,退出
cvCvtColor(frameimg, frameimg, CV_BGR2HSV);
array<float, 22> color = { 0 };
uchar* data = (uchar *)frameimg->imageData;
int step = frameimg->widthStep / sizeof(uchar);
int channels = frameimg->nChannels;
uchar* h = new uchar[frameimg->height*frameimg->width];
uchar* s = new uchar[frameimg->height*frameimg->width];
uchar* v = new uchar[frameimg->height*frameimg->width];
for (int i = 0; i < frameimg->height; i++) {
for (int j = 0; j < frameimg->width; j++) {
h[i*frameimg->height + j] = data[i*step + j*channels + 0] / 21;
if (h[i*frameimg->height + j] > 11)h[i*frameimg->height + j] = 11;
s[i*frameimg->height + j] = data[i*step + j*channels + 1] / 51;
if (s[i*frameimg->height + j] > 4)s[i*frameimg->height + j] = 4;
v[i*frameimg->height + j] = data[i*step + j*channels + 2] / 51;
if (v[i*frameimg->height + j] > 4)v[i*frameimg->height + j] = 4;
color[h[i*frameimg->height + j]]++;
color[12 + s[i*frameimg->height + j]]++;
color[17 + v[i*frameimg->height + j]]++;
}
}
for (int i = 0; i < 22; i++) {
color[i] /= frameimg->height*frameimg->width;
}
colorbar.push_back(color);
}
float threshold = 0.8f;
list<array<float, 22> >::iterator it = colorbar.begin();
it++;
vector<shot>Shot;
//放入第一帧
shot first;
first.content.push_back(*colorbar.begin());
first.center = *colorbar.begin();
first.id.push_back(0);
Shot.push_back(first);
int count = 0;
int num = 1;
int index = 0;
float max = 0;
for (; it != colorbar.end(); it++) {
max = 0;
index = 0;
//计算相似度最大的
for (int i = 0; i < num; i++) {
float ratio = similarity(*it, Shot[i].center);
if (ratio > max) {
max = ratio;
index = i;
}
}
//如果最大的小于某个阈值,则新建一个聚类
if (max < threshold) {
num++;
shot newshot;
newshot.center = *it;
newshot.content.push_back(*it);
newshot.id.push_back(count);
Shot.push_back(newshot);
}
else {
Shot[index].center = (*it + sum(Shot[index].content)) / (Shot[index].content.size() + 1);
Shot[index].content.push_back(*it);
Shot[index].id.push_back(count);
}
count++;
}
for (int i = 0; i < Shot.size(); i++) {
if (Shot[i].content.size() <10 && i>0) {
combine(Shot, i - 1, i);
i--;
}
}
float maxE = 0.0f;
int indexE = 0;
for (int i = 0; i < Shot.size(); i++) {
int id = findMaxEntropyId(Shot[i].content, Shot[i].id);
printf("%d\n", id);
}
printf("%d", Shot.size());
cvDestroyWindow("mainWin");
}
int main(int argc, char* argv[])
{
handleVideo();
waitKey();
system("pause");
return 0;
}














 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









