







 文章通过GIS技术,利用遥感影像进行监督分类,结合高速公路、市区道路、铁路等矢量数据,为动物迁徙路径计算阻力值,进而创建成本距离和成本路径,以确定从辰山植物园到阳山森林公园之间的最优生态廊道位置。
文章通过GIS技术,利用遥感影像进行监督分类,结合高速公路、市区道路、铁路等矢量数据,为动物迁徙路径计算阻力值,进而创建成本距离和成本路径,以确定从辰山植物园到阳山森林公园之间的最优生态廊道位置。
目录
1. 案例背景
动物需要在不同的森林公园之间迁徙交流,在经过不同的地表时,动物迁徙的困难程度是不一样的,如经过草地林地比较容易,而经过水域和道路时则比较困难。在不同的公园之间构建生态廊道,保护动物的迁徙。
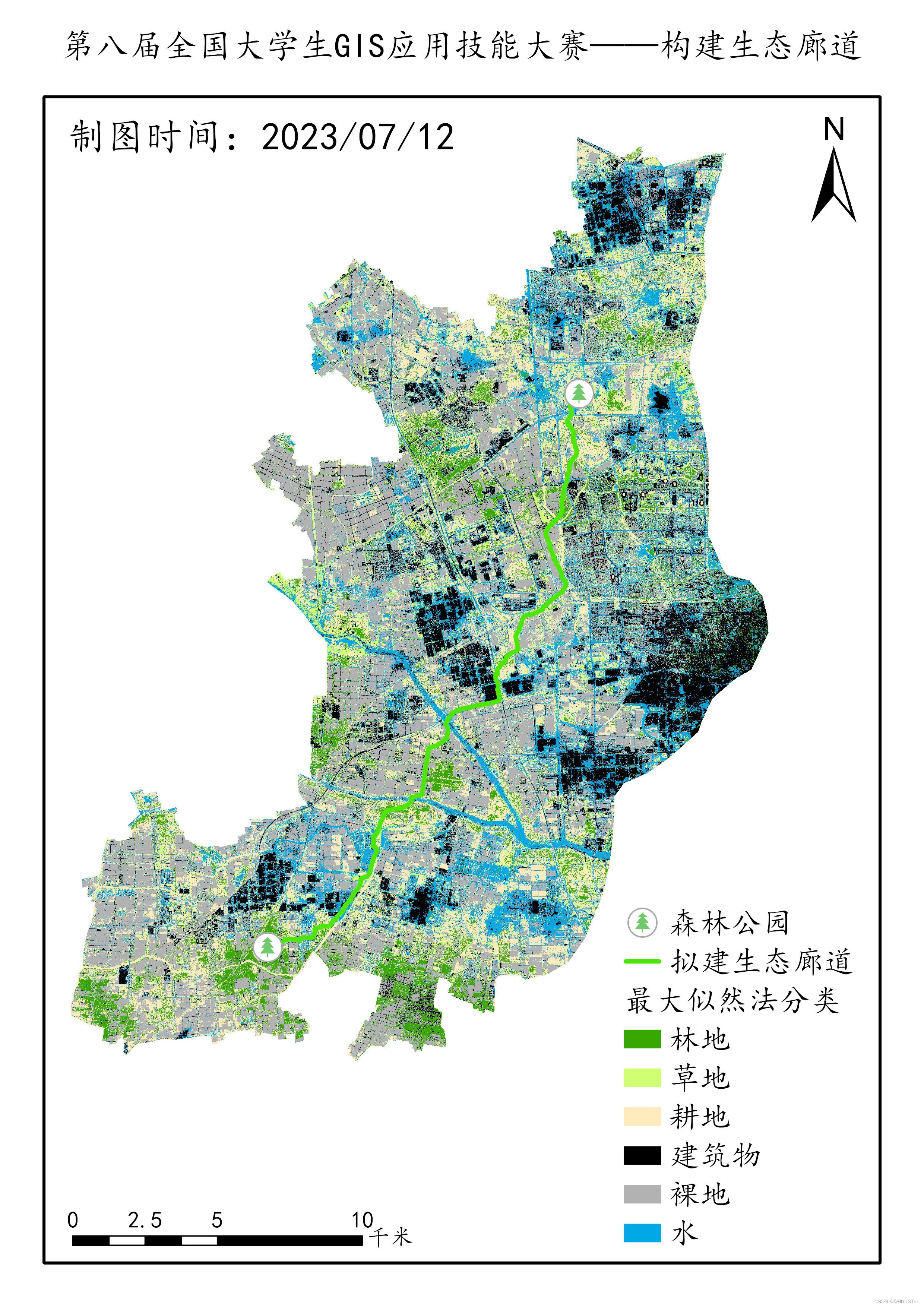
2. 出图展示
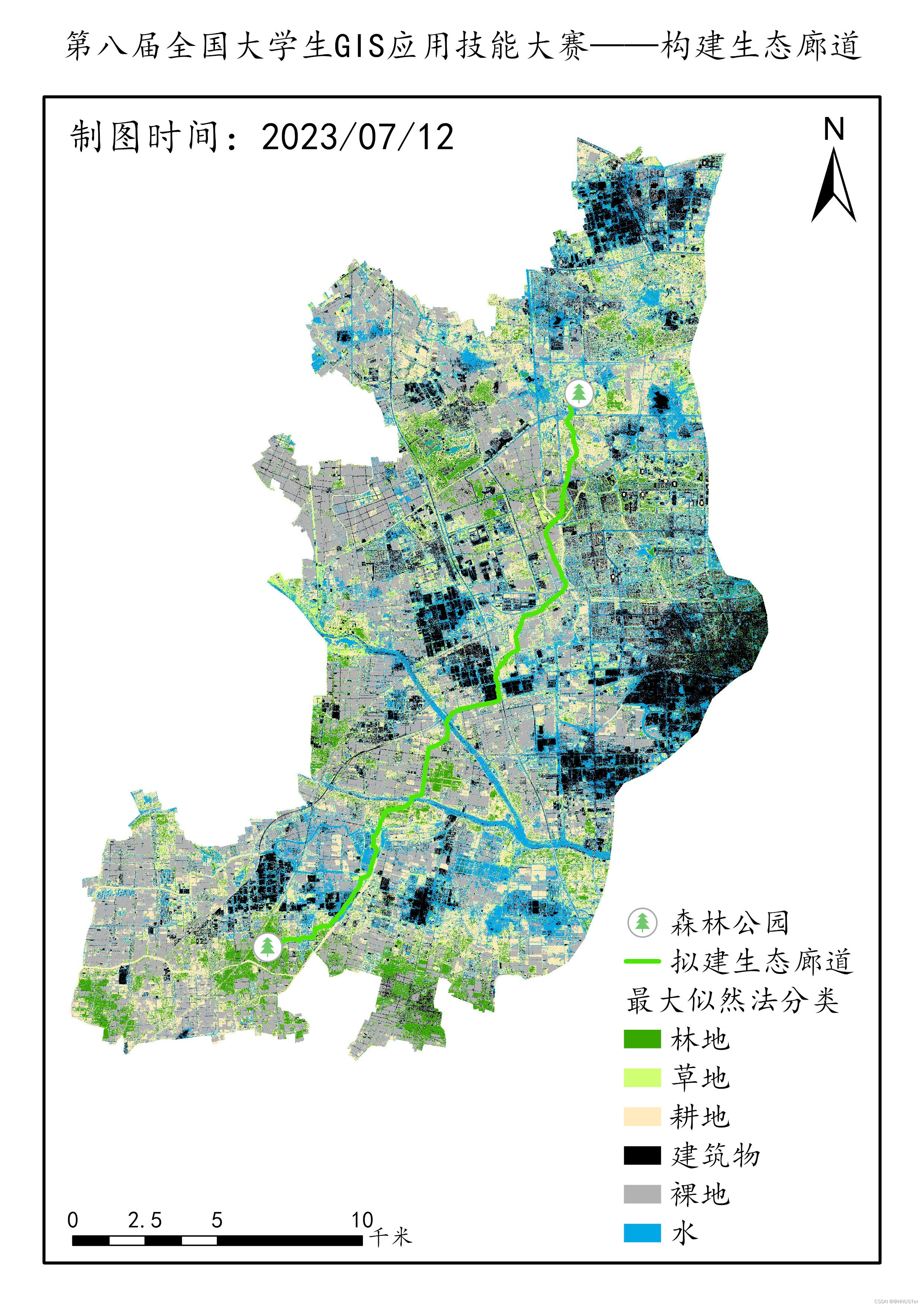
3. 数据说明
4. 要求
| 土地利用类型 | 具体说明 | 阻力取值 |
|---|---|---|
|
交通用地
|
市区道路(
15m
缓冲)
| 150 |
|
高速公路(20m 缓冲)
| 200 | |
|
铁路(30m 缓冲)
| 300 | |
|
遥感影像分类
|
建筑
| 150 |
| 裸地 | 10 | |
| 林地 | 5 | |
| 耕地 | 50 | |
| 草地 | 5 | |
| 水域 | 河流 | 80 |
5. 步骤
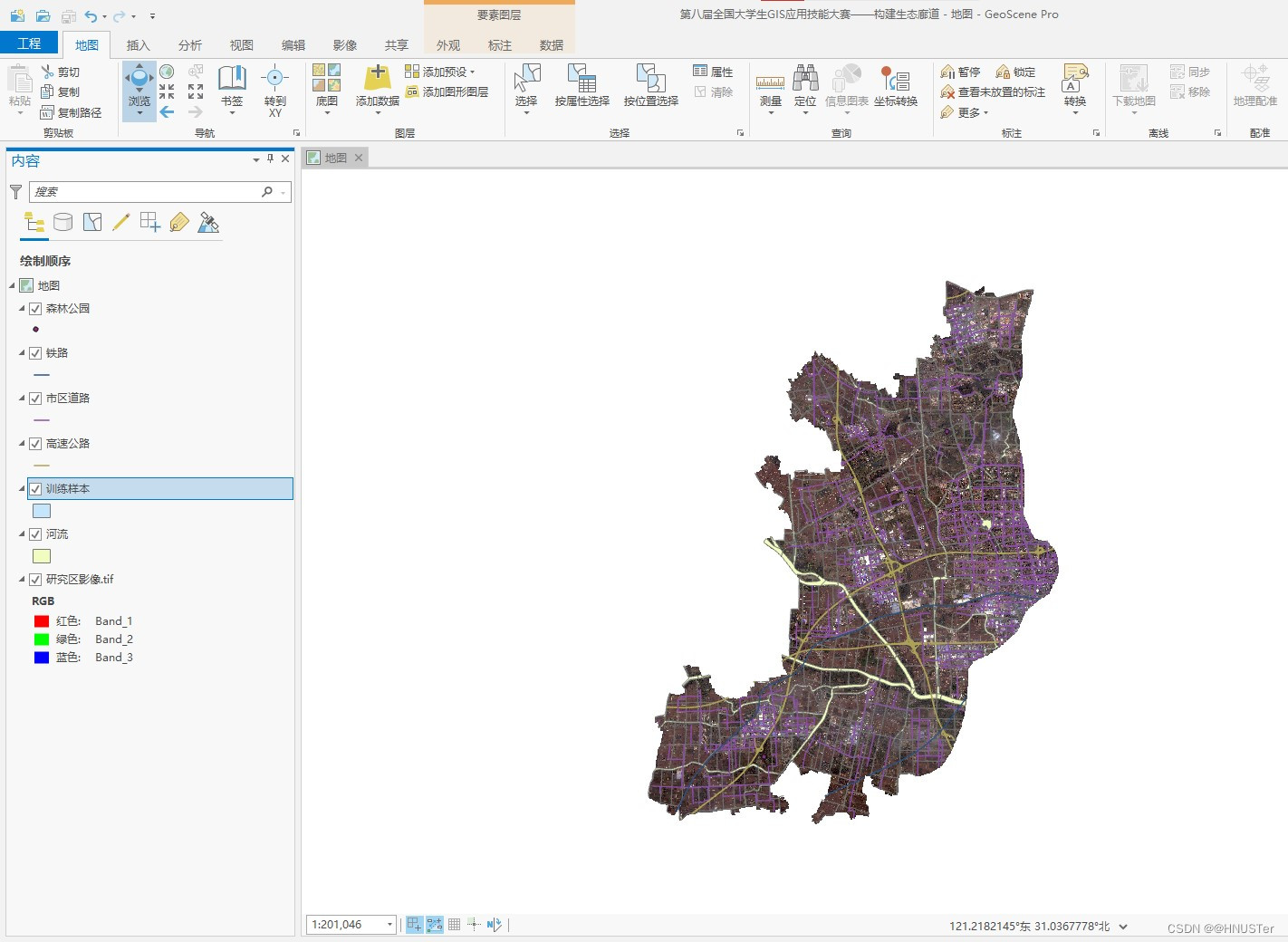
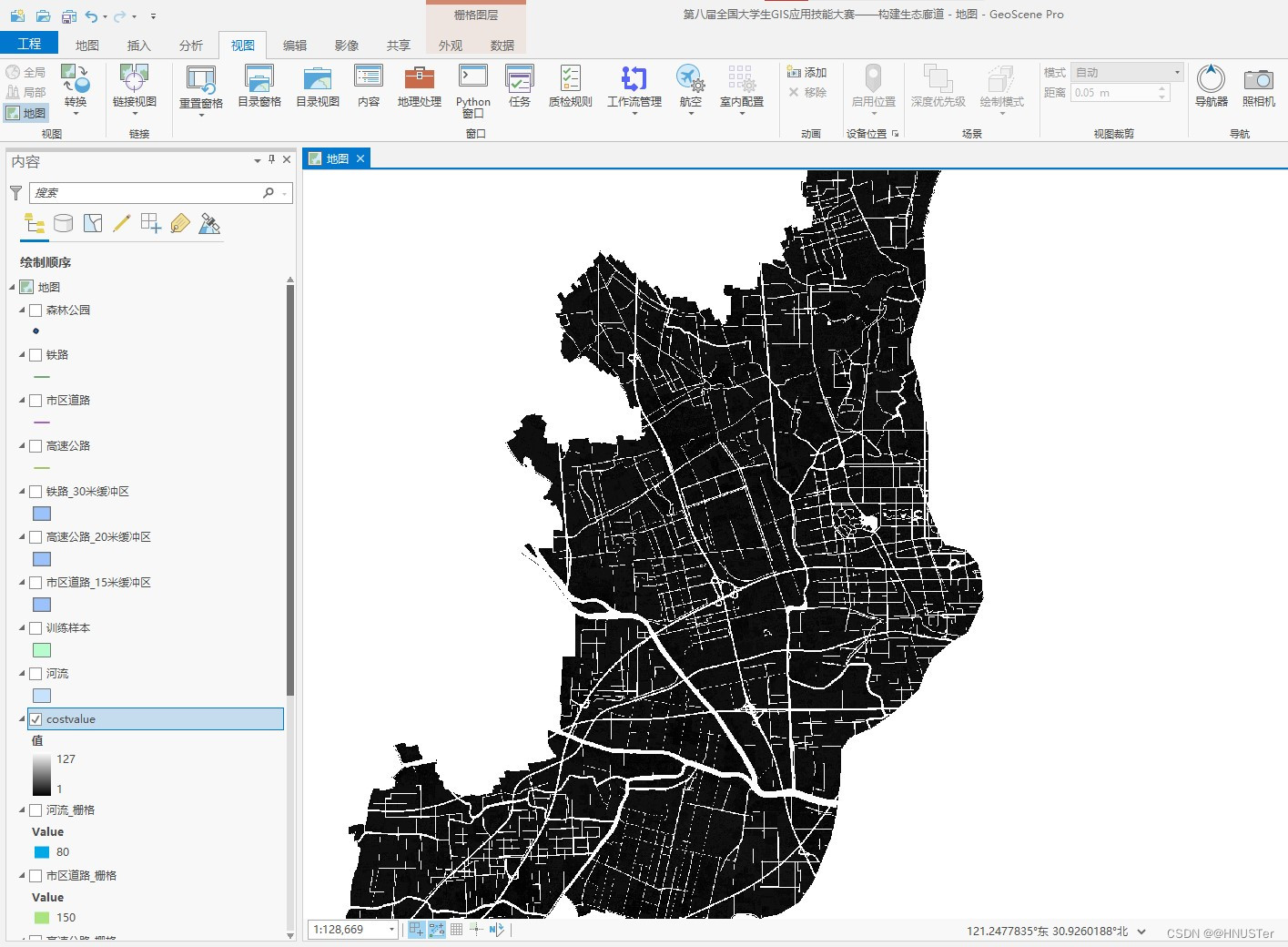
5.1 加载原始数据
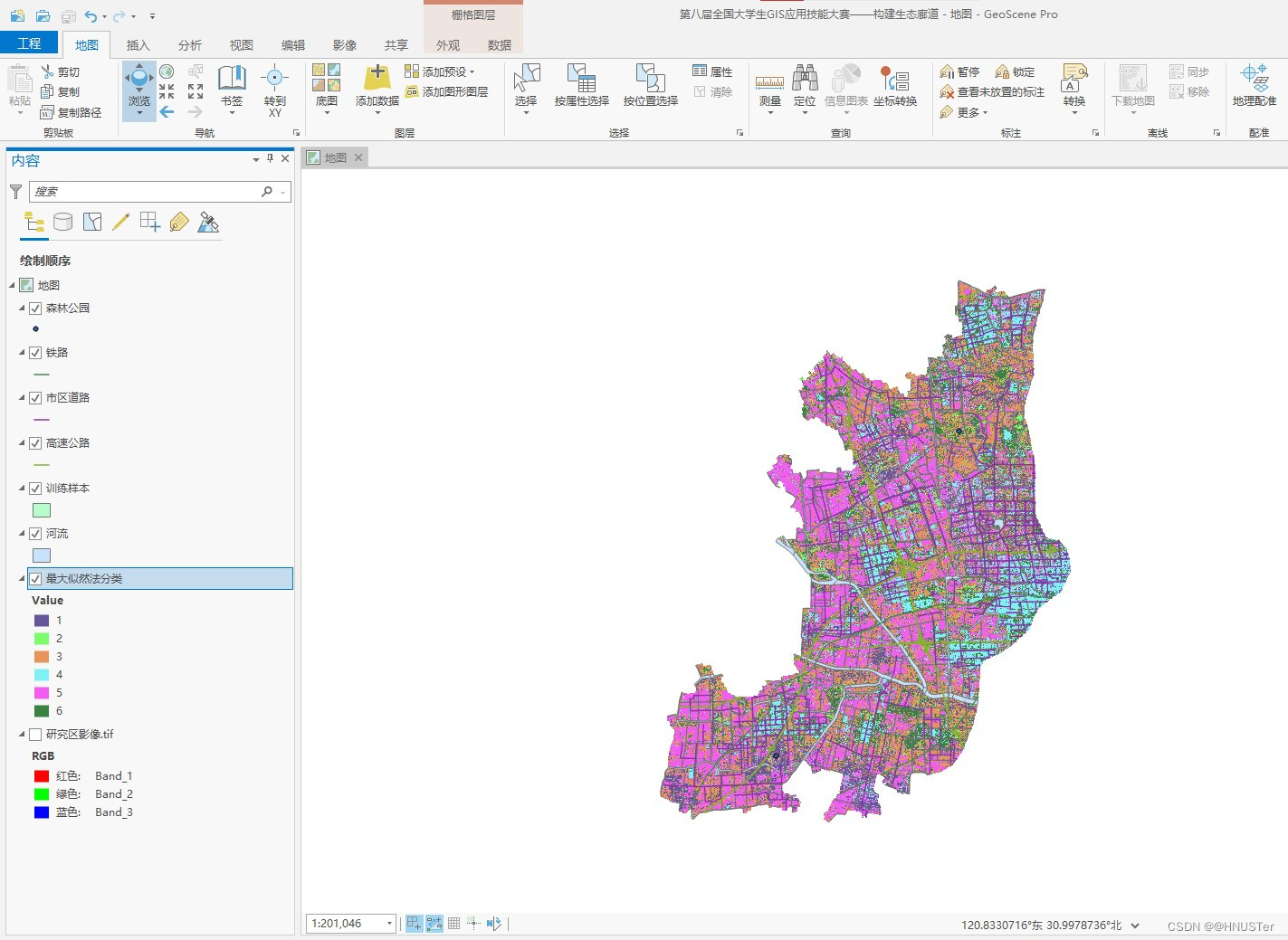
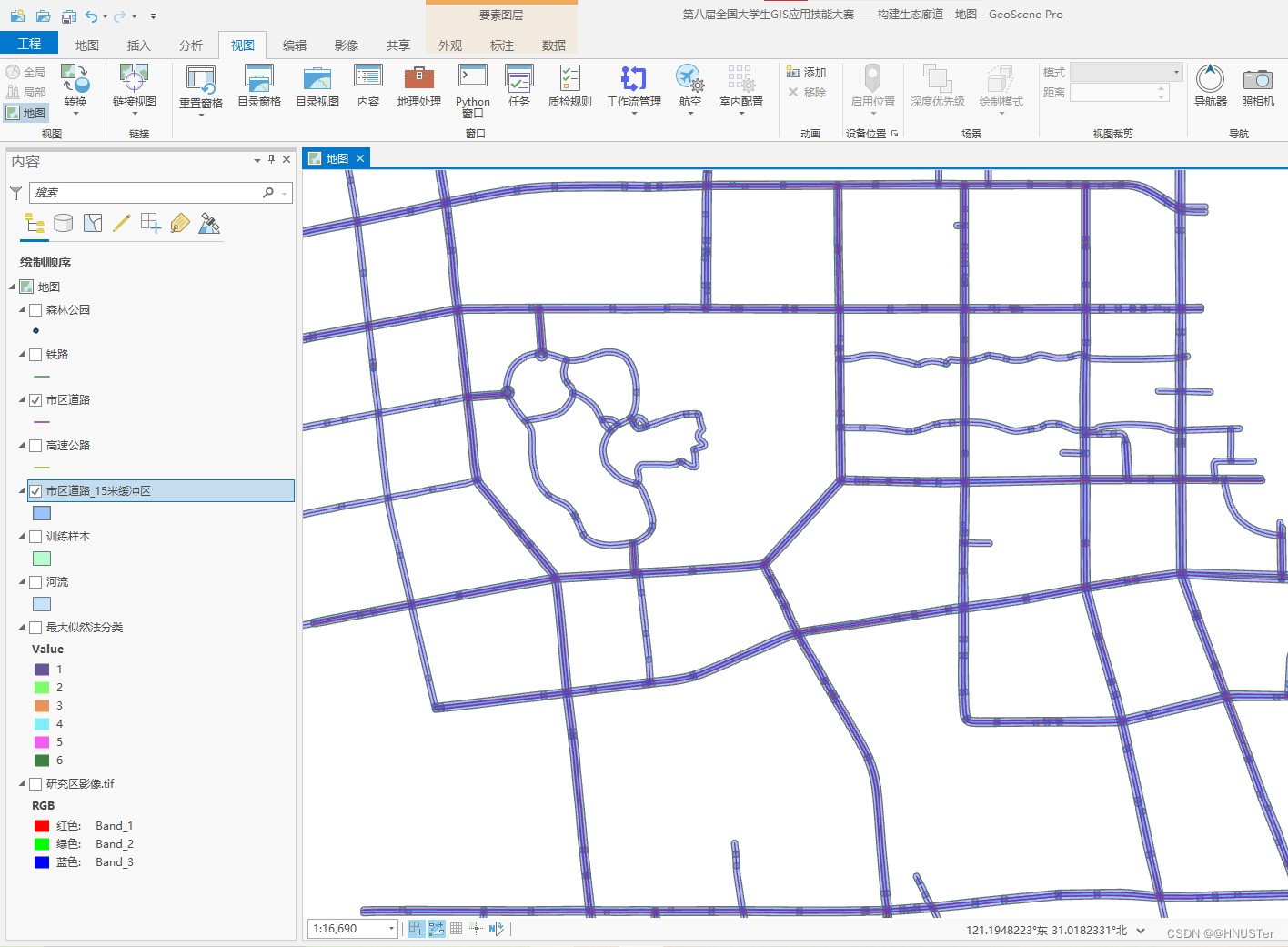
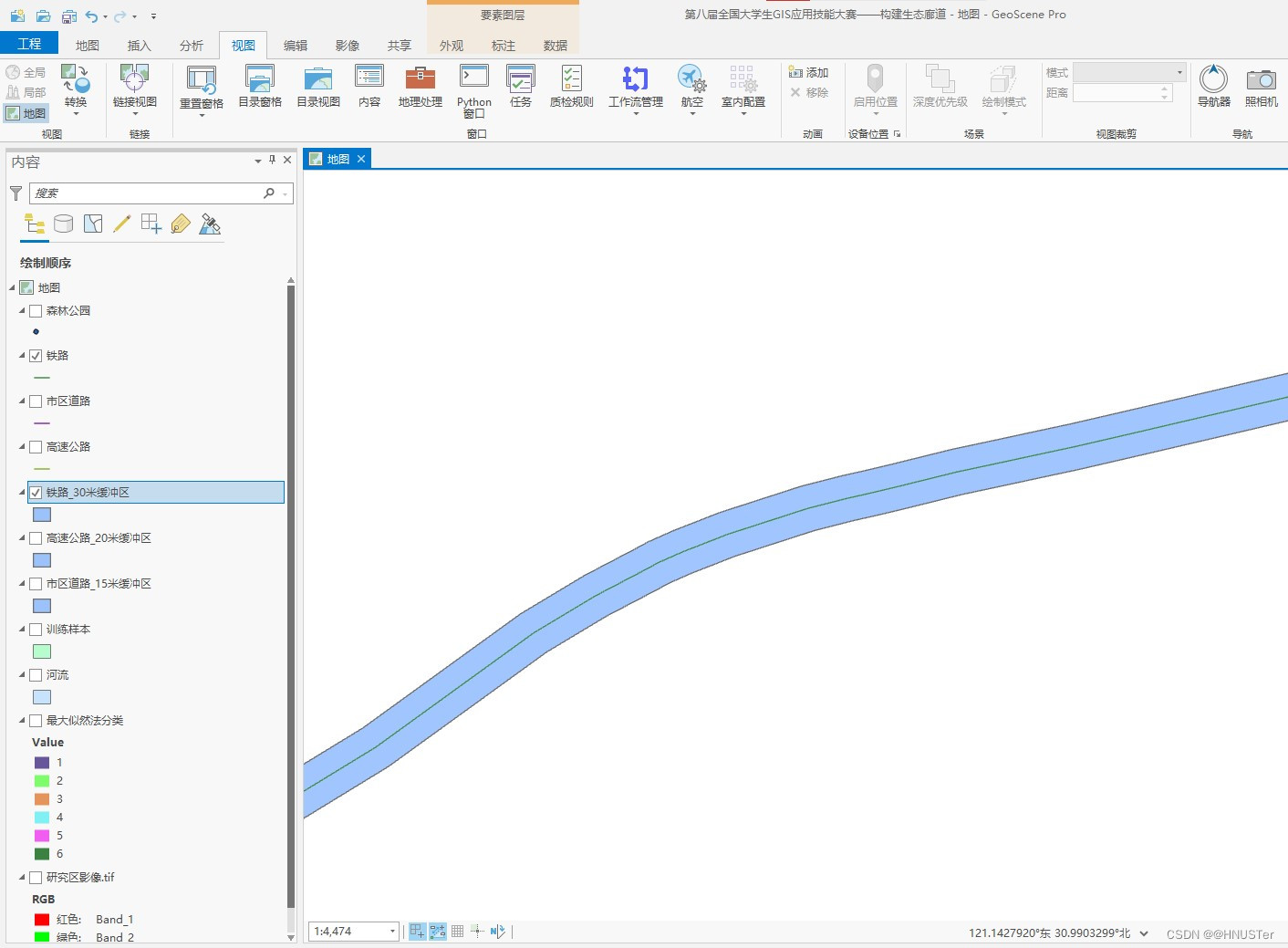
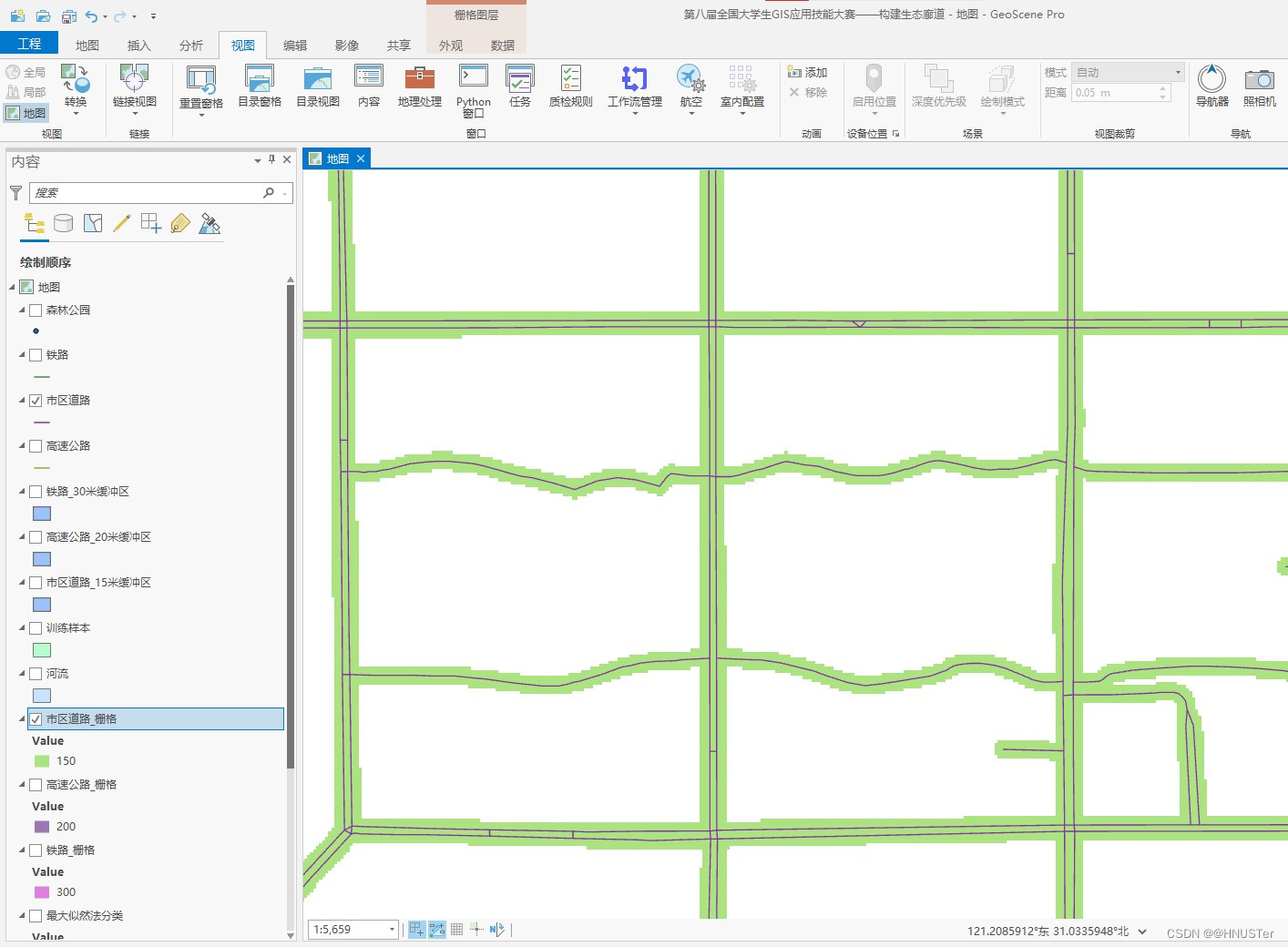
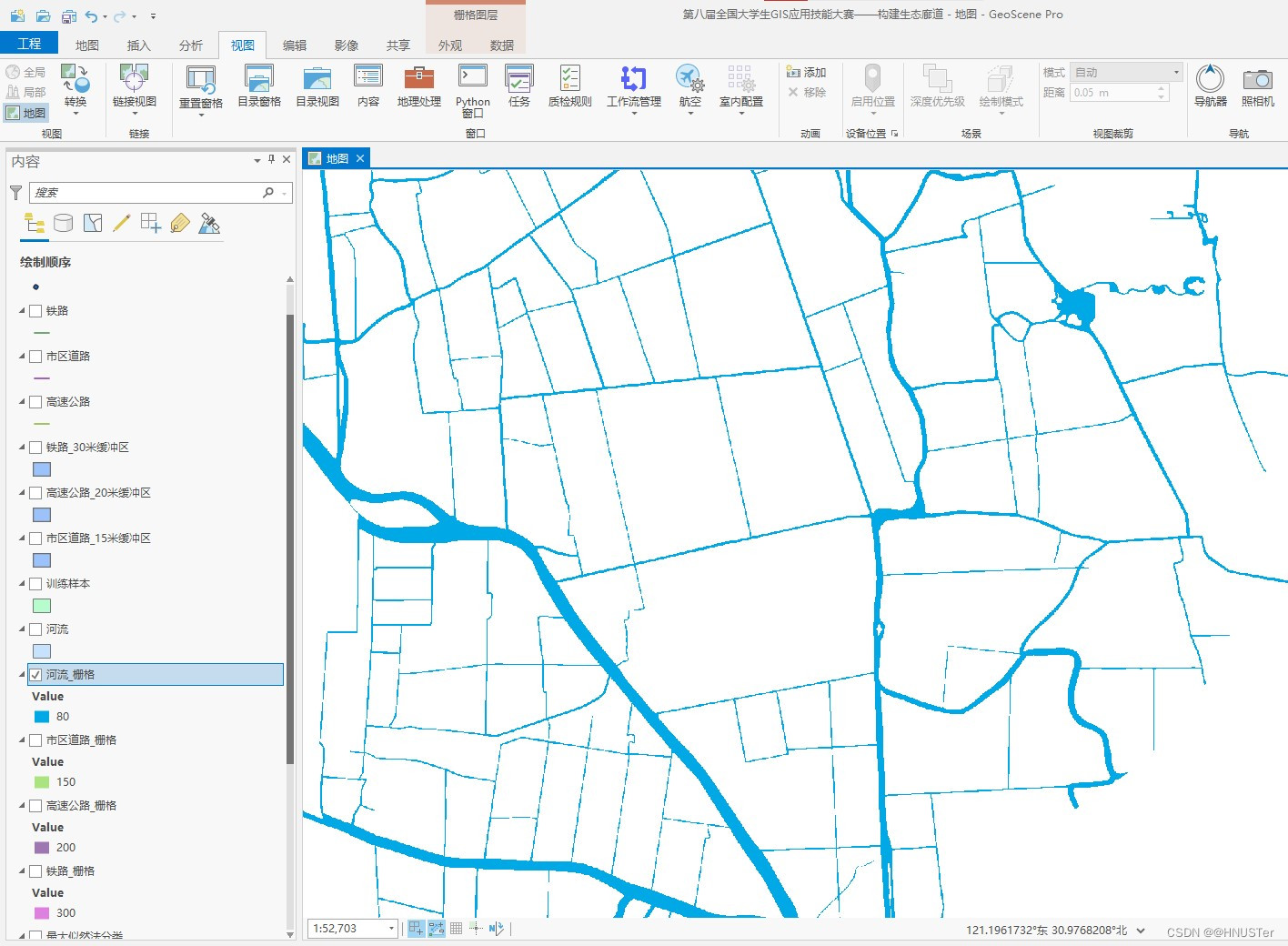
首先把全部的原始数据加载进GeoScene Pro软件,如下图所示。
5.2 遥感影像监督分类
然后查看训练样本数据的属性表以了解不同的分类编码代表具体什么的地表类型,后续的分类是基于分类编码进行的,因此必须知道分类编码所代表的实际地表类型的含义,如下图所示。
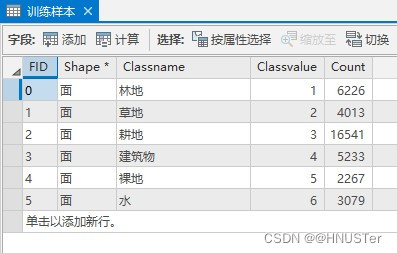
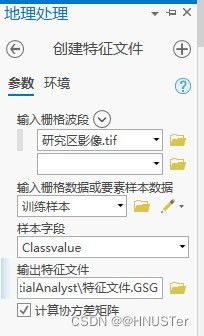
由上图可见,训练样本中一共分了6类地表类型,下面根据遥感影像数据和训练样本数据创建后续监督分类所需要的特征文件。这里使用到的是【创建特征文件】工具,输入栅格波段设置为研究区影像数据,输入栅格数据或要素样本数据设置为训练样本数据,样本字段选择Classvalue字段,也就是前面所说的基于分类编码进行分类,其实这里选择Classname字段也是可以的,但是为了避免中文可能带来的不必要的麻烦就直接选择Classvalue字段就好,如下图所示。
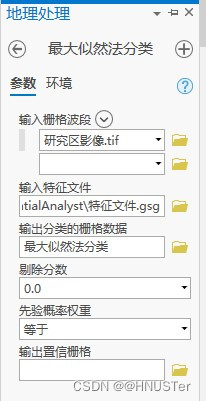
现在有了特征文件就可以进行监督分类了,这里我采用的是最大似然法分类,当然也可以采用其他的监督分类方法,需要使用到的工具是【最大似然法分类】工具,输入栅格波段也就是需要进行分类的影像数据,这里选择研究区影像数据,输入特征文件选择上一步得到的特征文件,先验概率权重选择等于,如下图所示。
5.3 阻力赋值
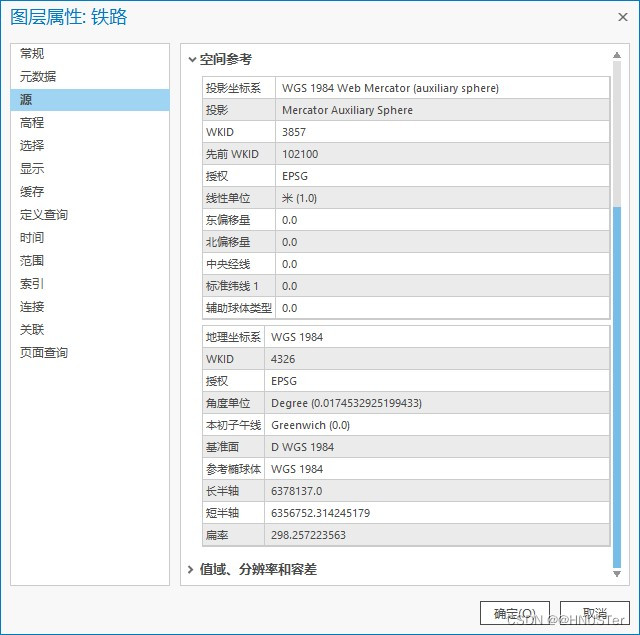
接下来就是根据题目要求来创建相应的缓冲区,然后为属性表添加阻力值字段并赋值,操作之前先要查看一下数据是否已经投影过,需要注意的是涉及到距离的操作必须使用经过投影的数据才可以进行,查看数据的属性信息可以知道原始数据已经投影过了,如下图所示。
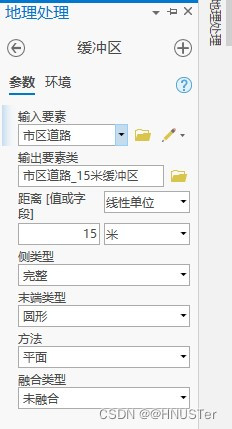
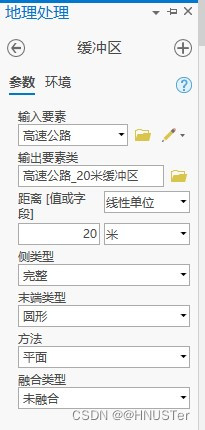
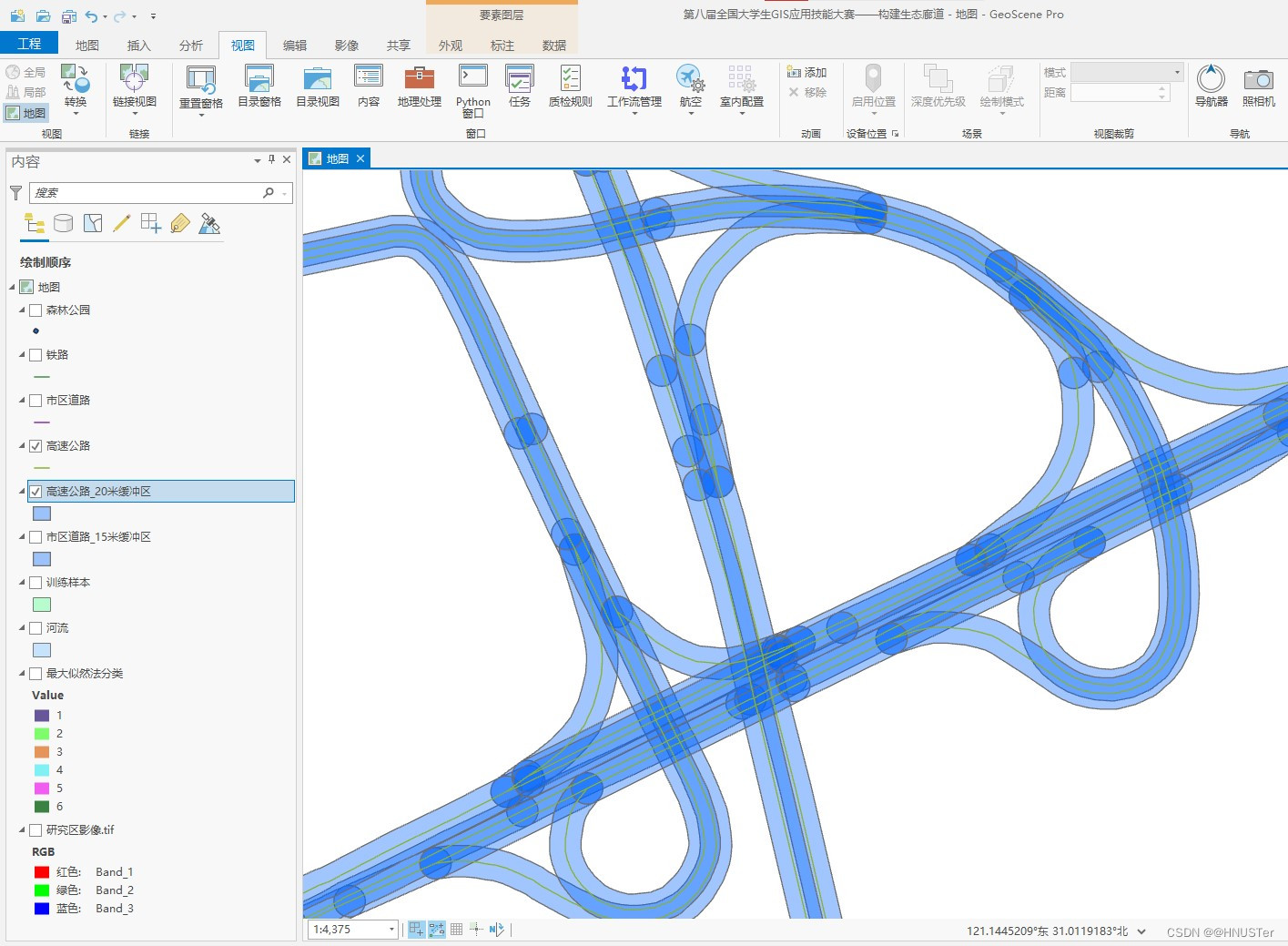
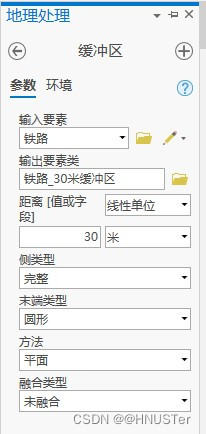
接下来进行缓冲区的创建,这里使用到的是【缓冲区】工具输入要素分别设置为市区道路、高速公路和铁路,距离分别设置为15米、20米和30米,侧类型都选择完整,末端类型都选择圆形,方法都选择平面,融合类型都选择未融合,如下图所示。
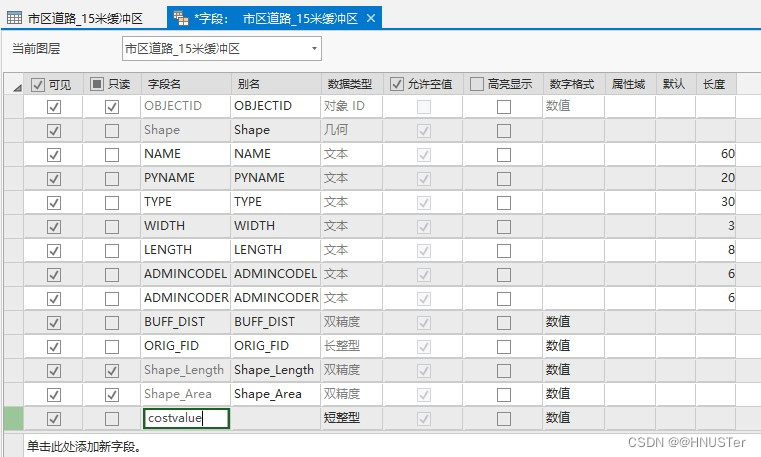
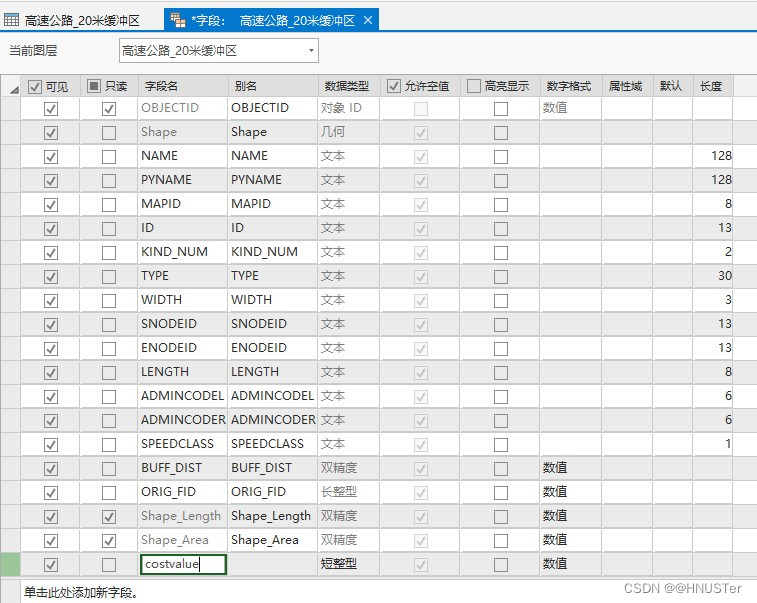
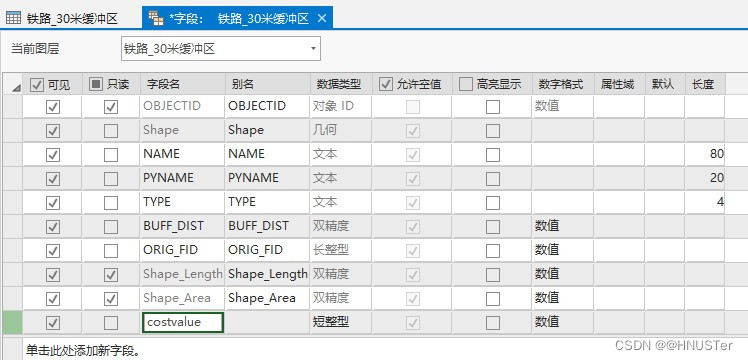
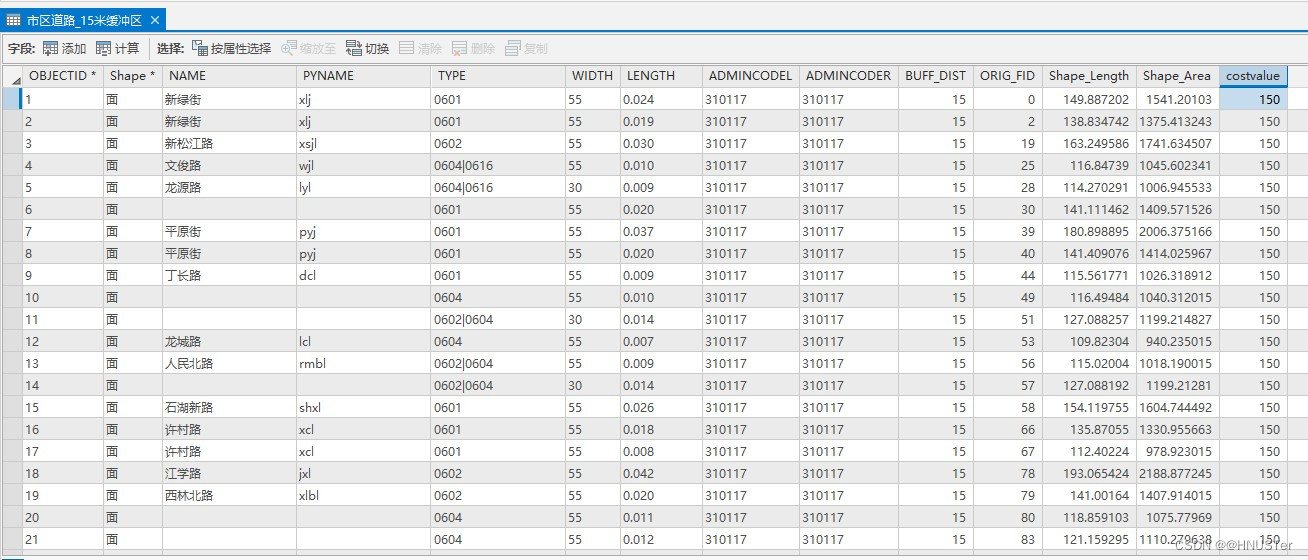
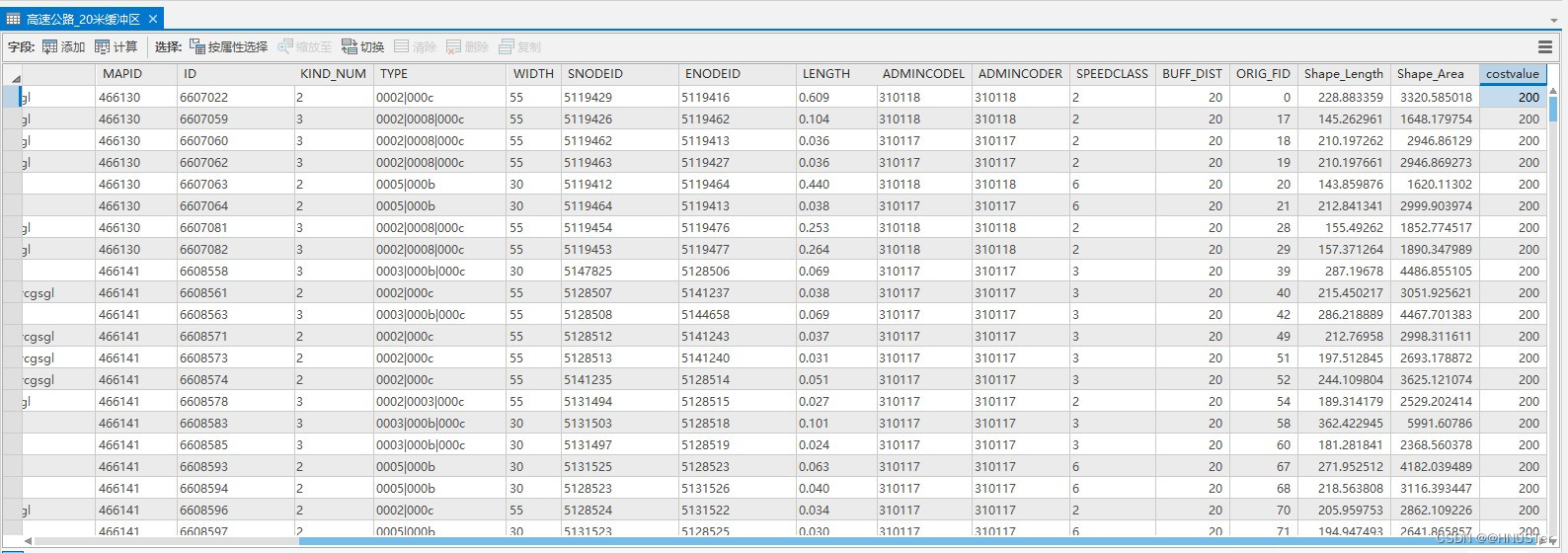
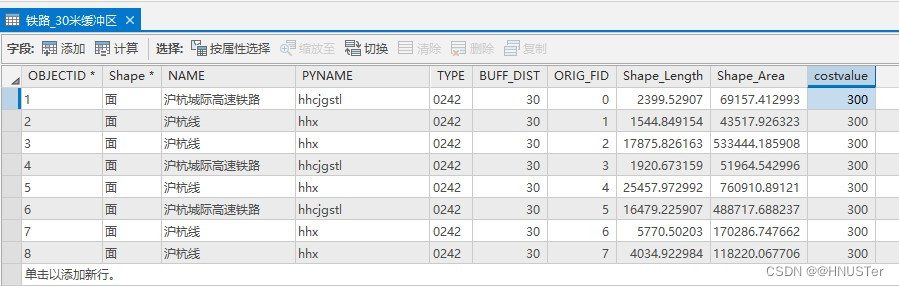
然后需要为刚才建立的每一个缓冲区数据的属性表添加一个字段用来记录动物迁徙时经过该地表的阻力值,该字段命名为costvalue,数据类型选择短整型,如下图所示。
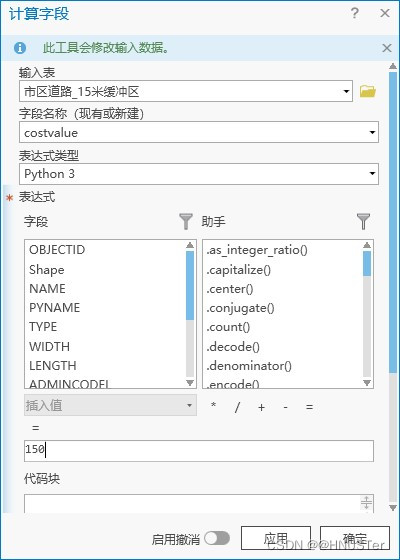
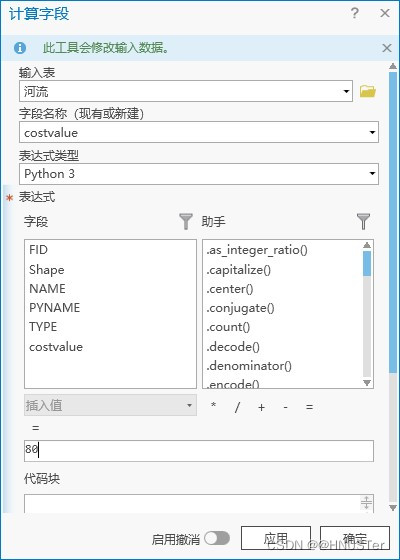
然后根据题目要求分别为costvalue字段赋值,使用到的是【计算字段】工具,在【计算字段】工具中分别输入阻力值数据即可快速实现批量赋值,如下图所示。
5.4 镶嵌阻力值栅格
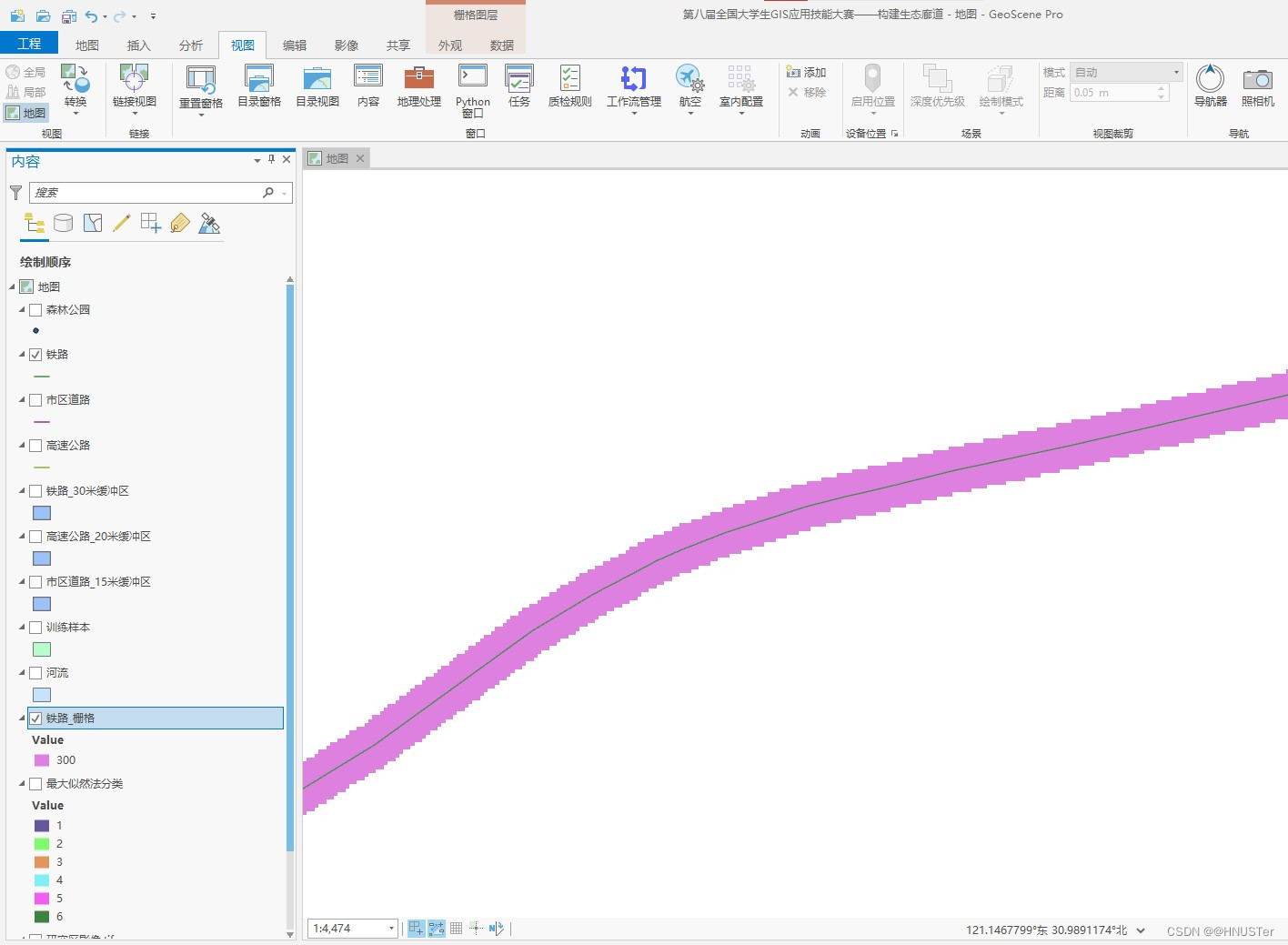
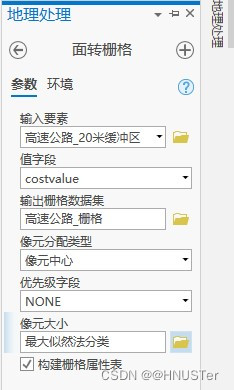
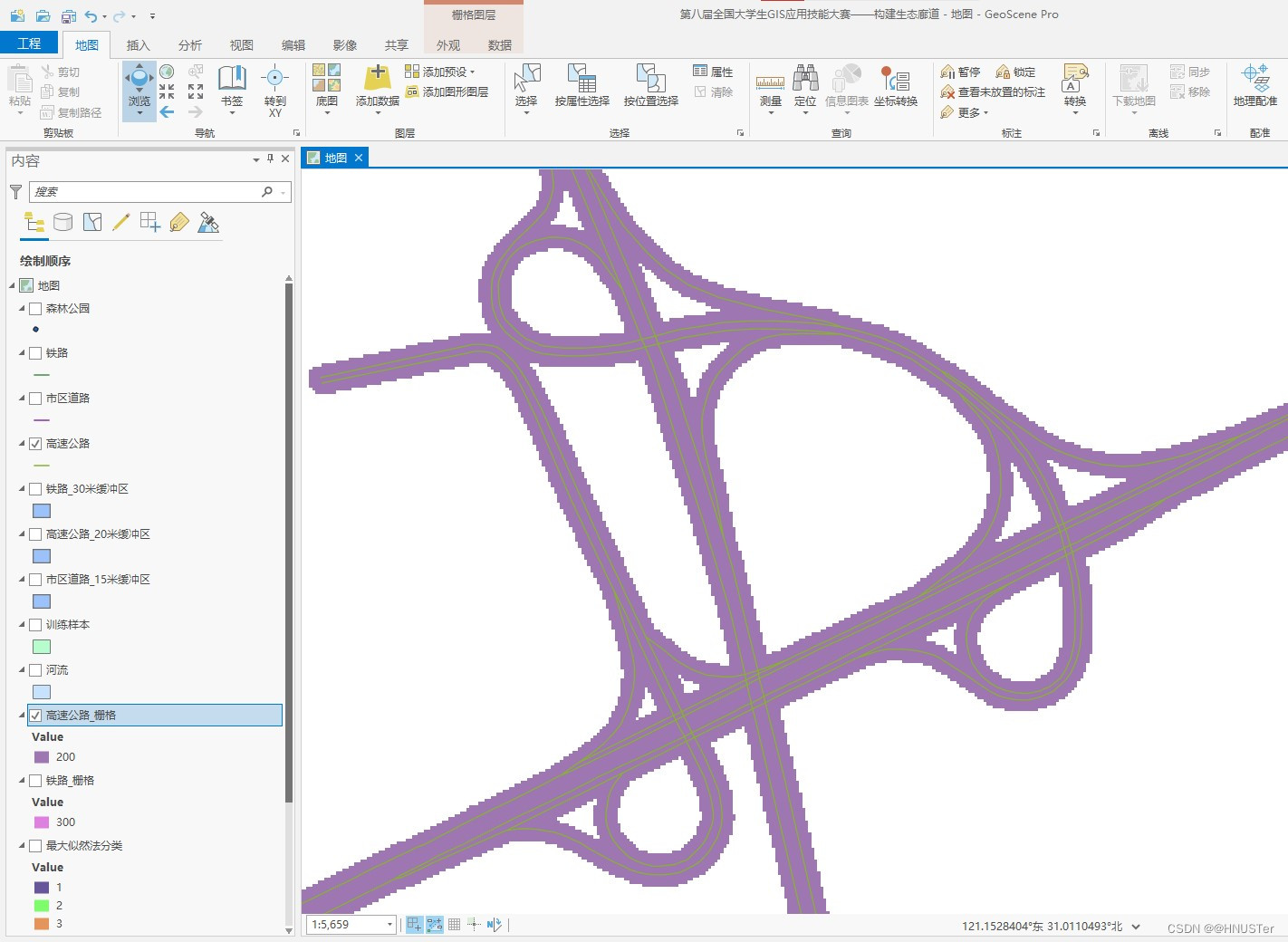
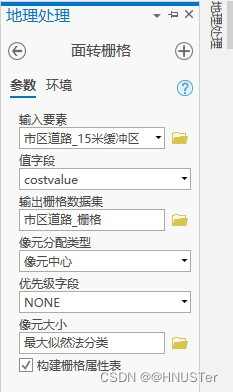
现在需要把带有阻力值信息的矢量数据转换为栅格数据以便后续的操作,这里使用到的工具是【面转栅格】工具,输入要素分别设置为上一步经过阻力赋值的缓冲区数据,值字段选择costvalue字段,也就是记录阻力值的字段,像元分配类型选择像元中心,优先级字段选择NONE,像元大小设置为与最大似然法分类结果的像元大小一致,这样才可以进行后续的栅格数据的处理,也可以先查看最大似然法分类结果数据的像元大小,然后直接把它的像元大小填在这里,即这里可以直接填写数字5,如下图所示。

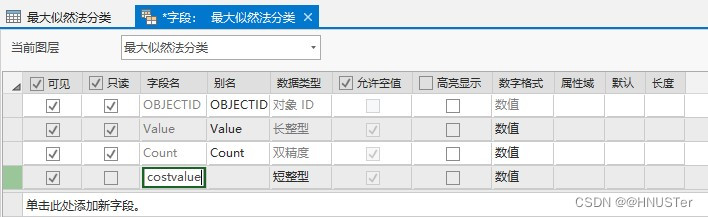
现在需要给之前最大似然法分类结果数据的属性表添加一个用来记录对应地表阻力值的字段,字段名称也设置为costvalue,数据类型也选择短整型,如下图所示。
然后依次为该字段进行赋值,这里数据量不多,而且各阻力值也不同,不需要用到批量赋值法,直接一个一个地手动输入阻力数据即可。这里需要注意的是编码6对应的是训练样本中的水,而题目中的要求并没有指明遥感影像中水的阻力值,仅仅指出了矢量数据河流的阻力值,因此这里的编码6应该为其阻力值赋值为0,如下图所示。

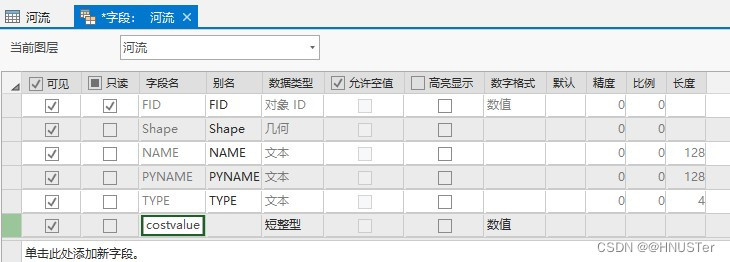
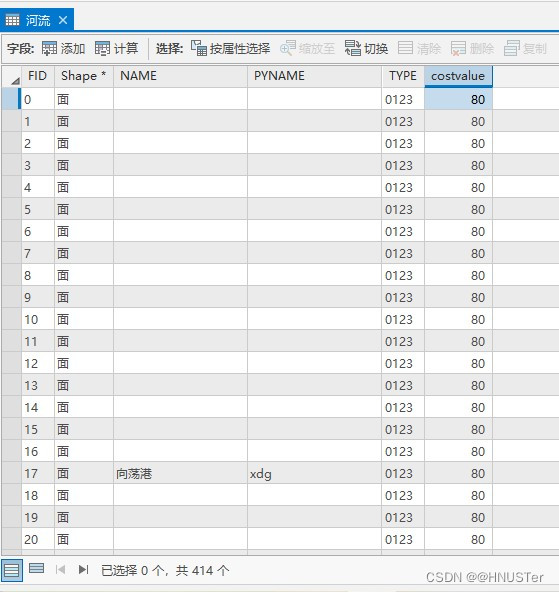
截至目前还有河流的数据还没有使用过,接下来为河流数据的属性表也添加一个costvalue字段用来记录阻力值,数据类型也设置为短整型,并按照上述批量操作的方法为该字段赋值,如下图所示。
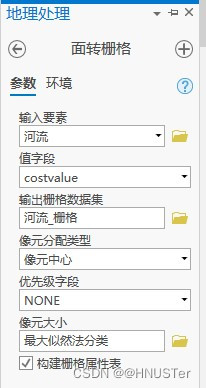
然后把河流的矢量数据转换为栅格数据,使用到的工具是【面转栅格】工具,输入要素设置为河流,值字段选择记录阻力值的字段即costvalue字段,像元分配类型选择像元中心,优先级字段选择NONE,像元大小设置为与最大似然法分类结果数据的像元大小一致,如下图所示。
为了得到阻力栅格数据,接下来需要进行的是镶嵌栅格数据,使用到的是【镶嵌至新栅格】工具,输入栅格分别设置为河流的栅格数据、市区道路缓冲区的栅格数据、高速公路缓冲区的栅格数据、铁路缓冲区的栅格数据以及最大似然法分类的结果数据,栅格数据的空间参考设置为与最大似然法分类结果数据一样的坐标系统,像素类型选择8位有符号,像元大小设置为5,这里的像元大小不能随意设置,因为最大似然法分类的结果数据和矢量转栅格的结果数据的像元大小都是5,所以这里需要设置成5,波段数设置为1,波段数信息可以从最大似然法分类结果数据的属性信息中查找到,镶嵌运算符选择Maximum,镶嵌色彩映射表模式选择First,如下图所示。

5.5 创建成本距离
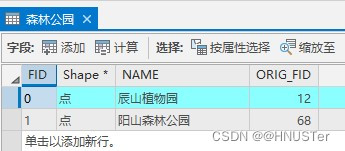
森林公园作为生态廊道的起始点和终止点,这里在创建成本距离之前需要先选中其中一个森林公园数据,如下图所示。
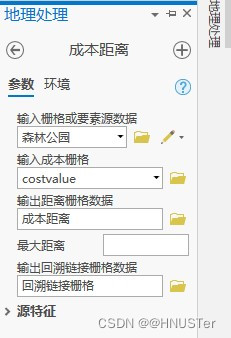
然后使用【成本距离】工具来创建成本距离,输入栅格或要素源数据设置为森林公园数据,输入成本栅格设置为上一步经过镶嵌栅格得到的成本栅格数据,这里需要注意既要输出距离栅格数据,又要输出回溯链接栅格数据,因为这两个数据在后续的创建成本路径操作中都需要使用到,如下图所示。

5.6 创建成本路径
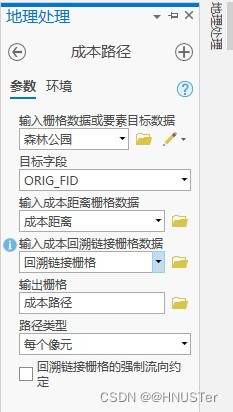
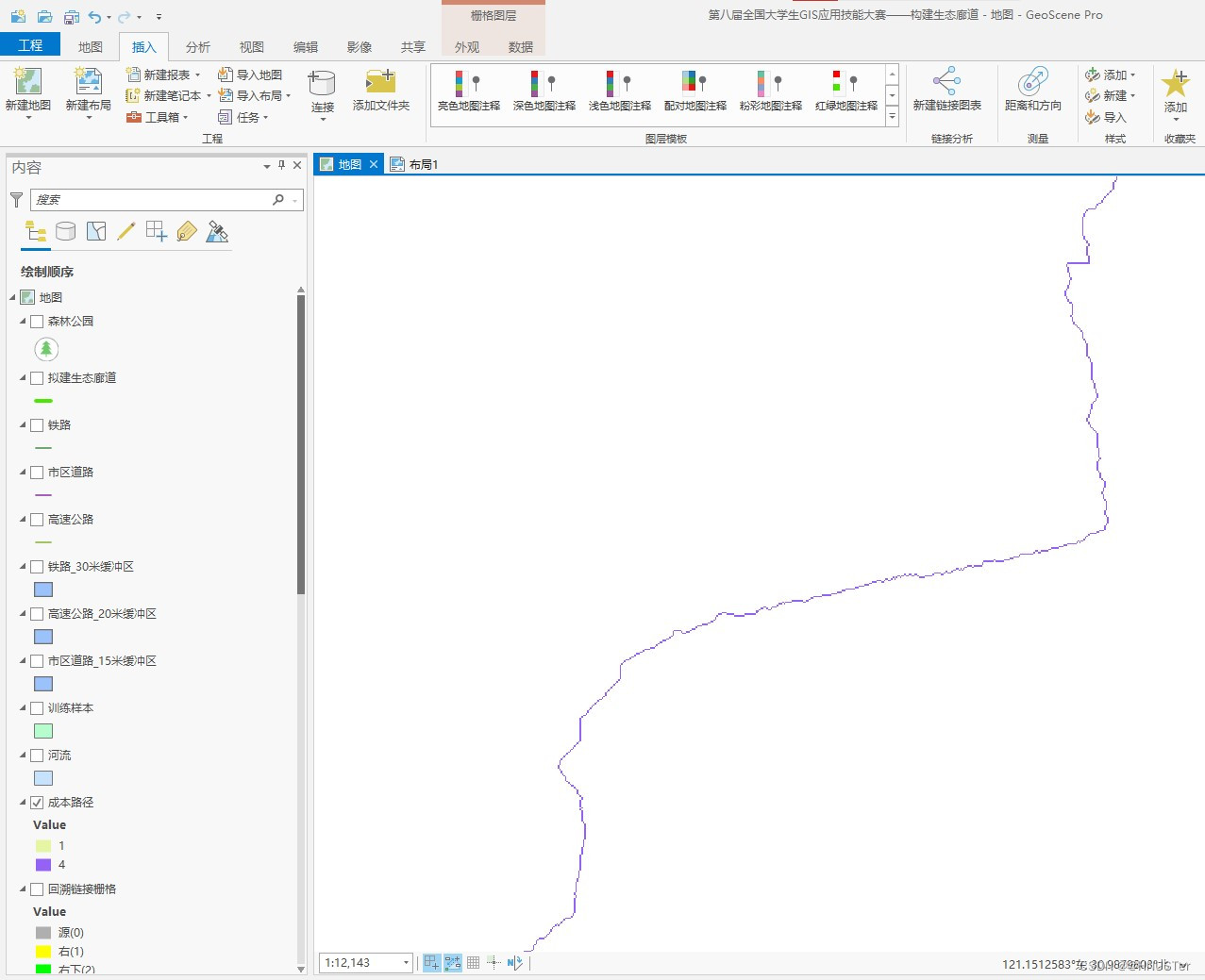
最后一步就是创建成本路径了,所谓的成本路径就是动物迁徙的阻力最小的路线,在这样的路线上修建生态廊道是对动物迁徙最为有利的。创建成本路径使用到的是【成本路径】工具,输入栅格数据或要素目标数据设置为森林公园数据,目标字段设置为ORIG_FID字段,输入成本距离栅格数据设置为上一步得到的成本距离栅格数据,输入成本回溯链接栅格数据设置为上一步得到的成本回溯链接栅格数据,路径类型选择每个像元,如下图所示。
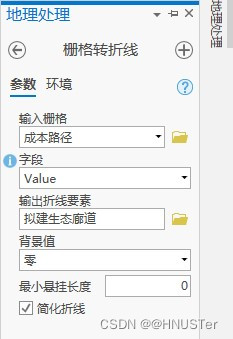
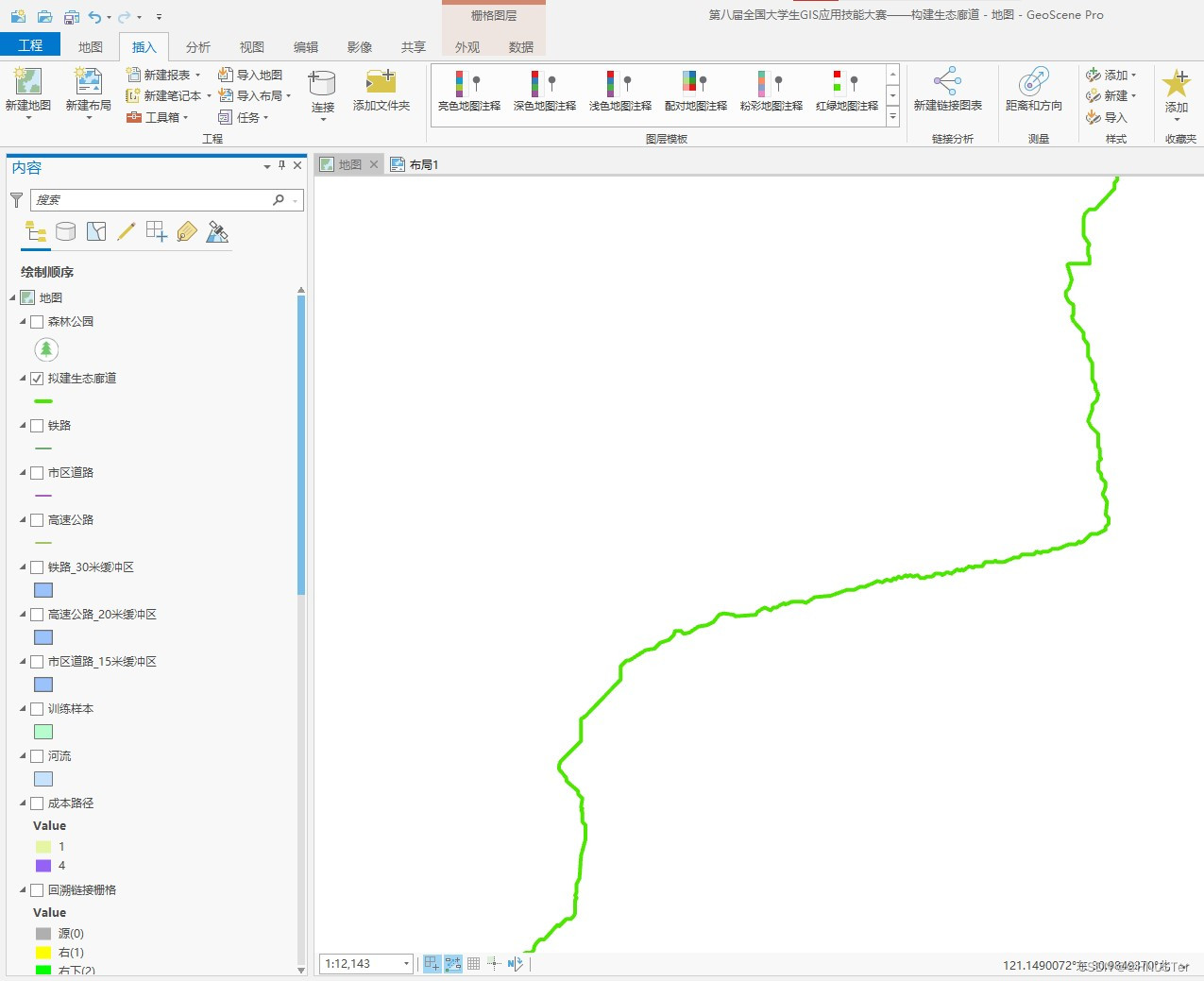
为了最终出图的美观还需要把成本路径的栅格数据转换为矢量数据,这里使用到的是【栅格转折线】工具,输入栅格设置为上一步得到的成本路径数据,字段选择Value字段,背景值选择零,勾选简化折线,如下图所示。
6. 整饰出图


















 7271
7271

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









