









1、矩匹配方法
原理:在卫星传感器成像时,受温度、器件及辐射等条件影响,实际影像与理想影像之间会有偏差,传感器的响应函数为线性函数:。式中,X代表影像校正前的像素灰度值,Y表示校正后的影像灰度值,a表示传感器增益值,b表示传感器偏移量。在相同的辐射量下,对于相同的地物,由于传感器的增益与偏移,传感器获得的影像可能具有不同灰度值,使影像中出现不均匀的条带现象。矩匹配法的基本思想就是使各探测元响应数据归一化,使得校正图像各列的均值、
标准差,与标准参考列均值、标准差一致。
参考值:
1用整张影像(或者部分正常CCD的标准差。
用整张影像(或者部分正常CCD的期望。
条带噪声某一列:
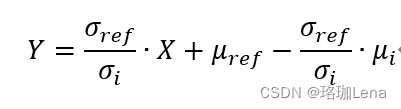
2用某一列CCD的标准差。
用某一列CCD的期望。
公式:















 726
726











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









