







常用神经网络层
图像相关层
图像相关层主要包括卷积层(Conv)、池化层(Pool)等,这些层在实际使用中可分为一维(1D)、二维(2D)、三维(3D),池化方式又分为平均池化(AvgPool)、最大值池化(MaxPool)、自适应池化(AdaptiveAvgPool)等。而卷积层除了常用的前向卷积之外,还有逆卷积(TransposeConv)。下面举例说明一些基础的使用。
from PIL import Image
from torchvision.transforms import ToTensor, ToPILImage
import torch as t
import torch.nn as nn
to_tensor = ToTensor() # img -> tensor
to_pil = ToPILImage()
lena = Image.open('imgs/lena.png')
Image._show(lena)
# 输入是一个batch,batch_size=1
input = to_tensor(lena).unsqueeze(0)
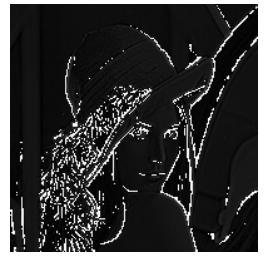
# 锐化卷积核
kernel = t.ones(3, 3)/-9.
kernel[1][1] = 1
conv = nn.Conv2d(1, 1, (3, 3), 1, bias=False)
conv.weight.data = kernel.view(1, 1, 3, 3)
out = conv(input)
to_pil(out.data.squeeze(0))
结果:

池化层可以看作是一种特殊的卷积层,用来下采样。但池化层没有可学习参数,其weight是固定的。
pool = nn.AvgPool2d(2,2)
print(list(pool.parameters()))
"""
[]
"""
out = pool(input)
to_pil(out.data.squeeze(0))
结果:

除了卷积层和池化层,深度学习中还将常用到以下几个层:
- Linear:全连接层。
- BatchNorm:批规范化层,分为1D、2D和3D。除了标准的BatchNorm之外,还有在风格迁移中常用到的InstanceNorm层。
- Dropout:dropout层,用来防止过拟合,同样分为1D、2D和3D。 下面通过例子来说明它们的使用。
# 输入 batch_size=2,维度3
input = t.randn(2, 3)
linear = nn.Linear(3, 4)
h = linear(input)
print(h)
"""
tensor([[-0.2182, -1.1601, 0.6349, 0.2109],
[-0.9075, 0.0830, -0.6275, -0.9657]], grad_fn=<AddmmBackward>)
"""
# 4 channel,初始化标准差为4,均值为0
bn = nn.BatchNorm1d(4)
bn.weight.data = t.ones(4) * 4
bn.bias.data = t.zeros(4)
bn_out = bn(h)
# 注意输出的均值和方差
# 方差是标准差的平方,计算无偏方差分母会减1
# 使用unbiased=False 分母不减1
print(bn_out.mean(0))
print(bn_out.var(0, unbiased=False))
"""
tensor([ 3.5763e-07, -2.3842e-07, 0.0000e+00, 0.0000e+00],
grad_fn=<MeanBackward1>)
tensor([15.9987, 15.9996, 15.9996, 15.9995], grad_fn=<VarBackward1>)
"""
# 每个元素以0.5的概率舍弃
dropout = nn.Dropout(0.5)
o = dropout(bn_out)
print(o)
"""
tensor([[ 7.9997, -0.0000, 7.9999, 7.9999],
[-7.9997, 7.9999, -7.9999, -0.0000]], grad_fn=<MulBackward0>)
"""
Sequential的三种写法:
net1 = nn.Sequential()
net1.add_module('conv', nn.Conv2d(3, 3, 3))
net1.add_module('batchnorm', nn.BatchNorm2d(3))
net1.add_module('activation_layer', nn.ReLU())
net2 = nn.Sequential(
nn.Conv2d(3, 3, 3),
nn.BatchNorm2d(3),
nn.ReLU()
)
from collections import OrderedDict
net3= nn.Sequential(OrderedDict([
('conv1', nn.Conv2d(3, 3, 3)),
('bn1', nn.BatchNorm2d(3)),
('relu1', nn.ReLU())
]))
print('net1:', net1)
print('net2:', net2)
print('net3:', net3)
"""
net1: Sequential(
(conv): Conv2d(3, 3, kernel_size=(3, 3), stride=(1, 1))
(batchnorm): BatchNorm2d(3, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(activation_layer): ReLU()
)
net2: Sequential(
(0): Conv2d(3, 3, kernel_size=(3, 3), stride=(1, 1))
(1): BatchNorm2d(3, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
)
net3: Sequential(
(conv1): Conv2d(3, 3, kernel_size=(3, 3), stride=(1, 1))
(bn1): BatchNorm2d(3, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU()
)
"""
# 可根据名字或序号取出子module
print(net1.conv)
print(net2[0])
print(net3.conv1)
"""
Conv2d(3, 3, kernel_size=(3, 3), stride=(1, 1))
Conv2d(3, 3, kernel_size=(3, 3), stride=(1, 1))
Conv2d(3, 3, kernel_size=(3, 3), stride=(1, 1))
"""















 1399
1399











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









