







 本文介绍了如何使用D*算法在Matlab中进行路径规划,包括栅格地图的绘制、自定义起点和目标点、处理障碍物,以及提供详细代码注释。着重于算法原理和实现过程,适用于路径规划的学习者和开发者。
本文介绍了如何使用D*算法在Matlab中进行路径规划,包括栅格地图的绘制、自定义起点和目标点、处理障碍物,以及提供详细代码注释。着重于算法原理和实现过程,适用于路径规划的学习者和开发者。
D*算法路径规划 Matlab路径规划 栅格法
可自行更改绘制栅格地图,自定义起始点目标点位置、未知障碍物位置
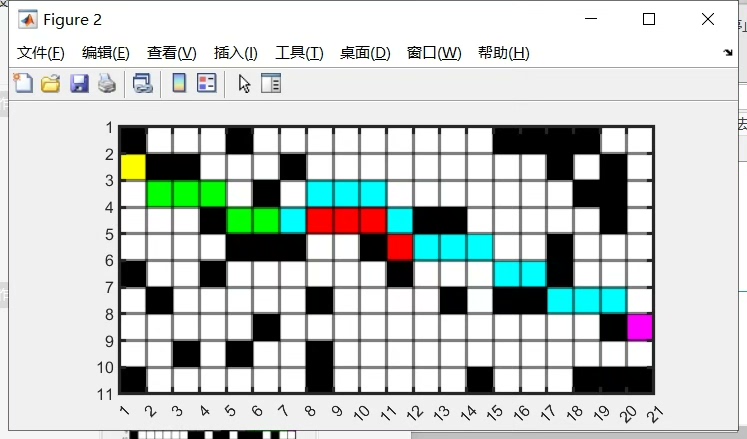
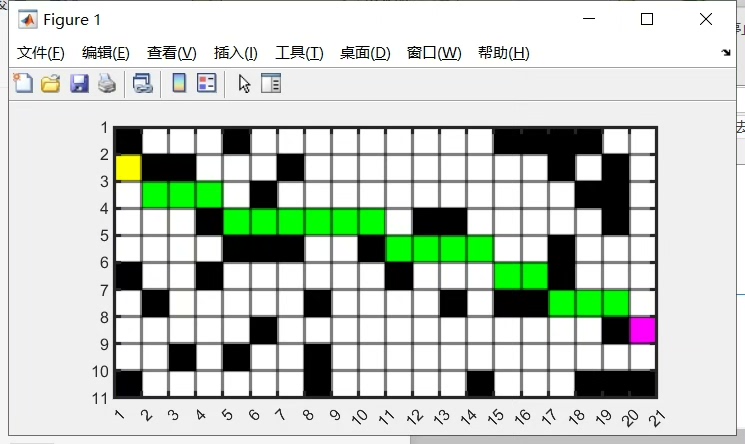
遭遇障碍物,重新搜索路径!
matlab实现
详细注释!
仅提供代码!
ID:155717853325039
马三拉蒂
D*算法是一种常用于路径规划的优化算法,而Matlab路径规划是使用Matlab软件来进行路径规划的一种方法。在路径规划中,栅格法是一种常用的方法,它将地图划分为一个个的栅格,并将栅格化地图用于路径规划。
首先,我们可以根据需求对栅格化地图进行绘制,自定义起始点和目标点的位置,以及未知障碍物的位置。这样我们便能在栅格化地图上进行路径规划的实验,验证我们所选择的路径规划算法的效果。
对于路径规划算法的选择,D算法是一种常用的方法。D算法是基于A算法的改进版本,它在路径规划过程中动态地更新路径,以提高路径规划的效率。在Matlab中实现D算法,我们可以借助Matlab的强大数学计算能力和易用的编程环境,编写出高效的D*算法代码。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









