






全局规划算法
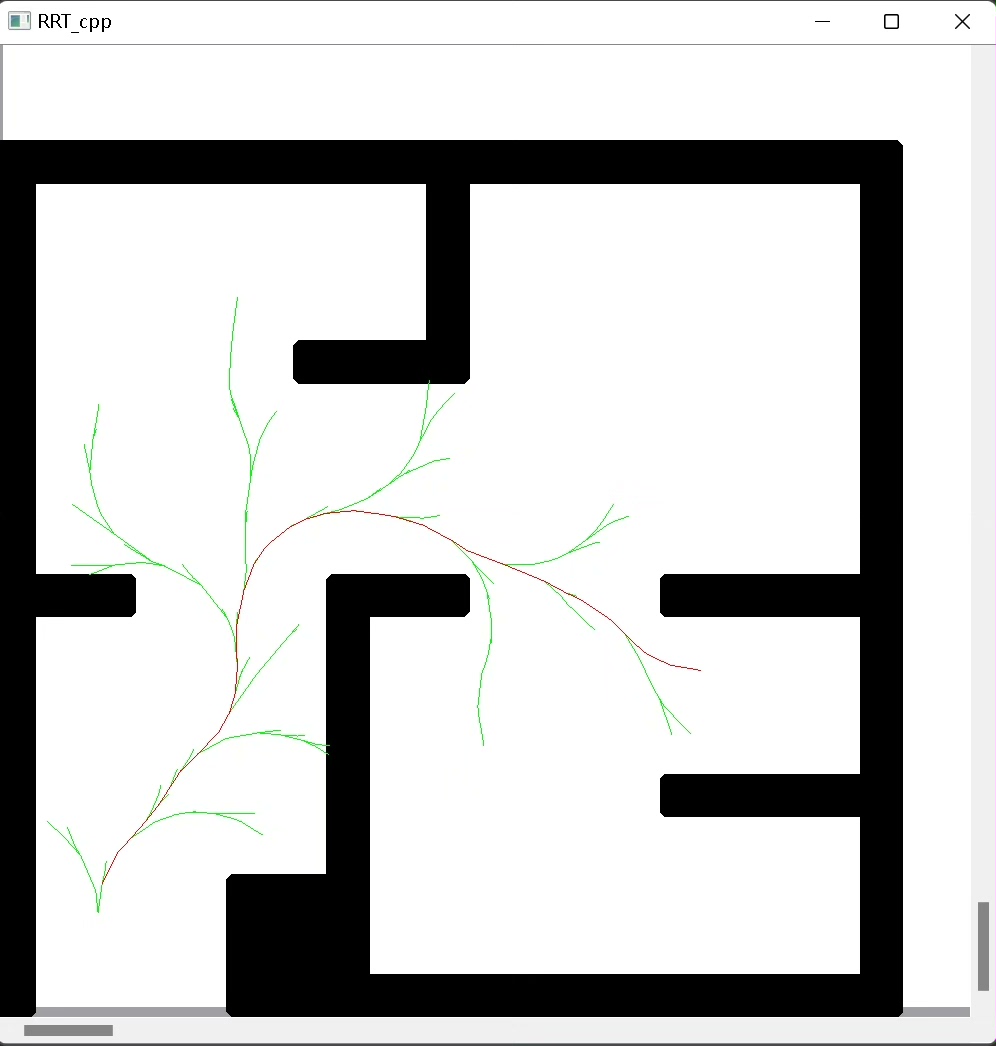
rrt+dubins规划
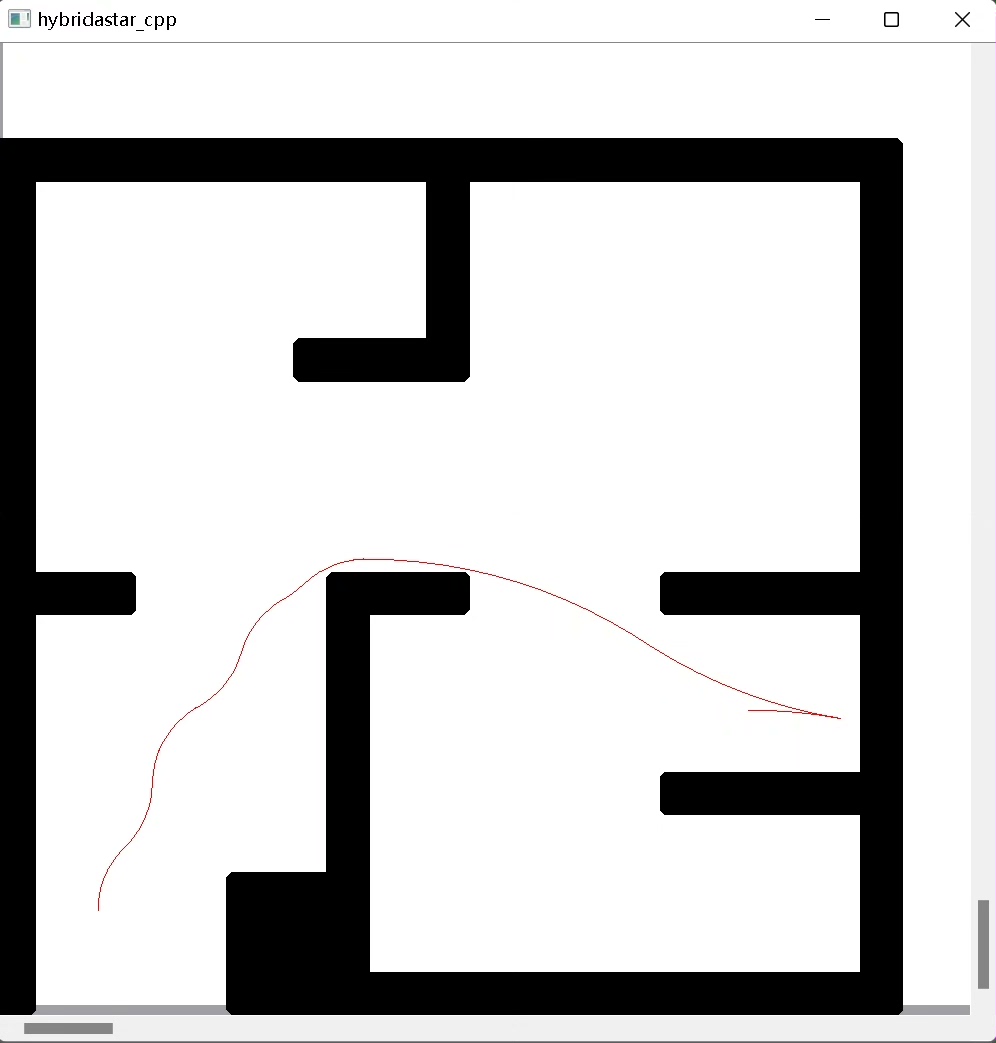
hybrid astar规划
c++实现栅格地图,状态空间,状态校验,RRT搜索算法 混合a星规划算法
ID:8689717795263487
autorobot
全局规划算法是在自动驾驶领域中至关重要的一项技术。在实现自动驾驶功能时,车辆需要能够规划出一条从起点到目标点的合理路径,以保证安全且高效地完成任务。本文将聚焦于三个关键的全局规划算法:RRT+Dubins规划、Hybrid A规划和混合A规划,并介绍了C++实现栅格地图、状态空间、状态校验以及RRT搜索算法的相关内容。
首先,RRT+Dubins规划是一种经典的路径规划算法。其基本思想是在状态空间中进行随机采样,并通过连续的状态转移生成一棵搜索树,直到找到一条连接起点和目标点的路径。RRT+Dubins规划算法的关键之处在于利用Dubins曲线来进行状态转移,这是一种能够在不同转向半径下实现最优转弯的曲线。通过将RRT和Dubins曲线结合起来,可以在复杂的环境中高效地进行路径规划。
其次,Hybrid A规划是一种综合利用连续和离散状态空间的路径规划算法。与传统的A算法不同,Hybrid A算法在状态空间中引入了连续的转向角度变量,并将其与离散的位置变量相结合。通过使用曼哈顿距离以及车辆转向角度的连续变化来评估路径的代价,Hybrid A算法能够更准确地估计路径的可行性和优劣。
最后,混合A规划算法是对传统A算法的改进和增强。该算法在搜索过程中,通过将连续的状态空间离散化为有限的几个离散状态空间,使得路径规划问题变得可解。混合A算法的核心思想是通过引入启发式函数来进行路径搜索,以减少实际搜索空间的复杂度。通过选择合适的启发式函数以及合理的搜索策略,混合A算法能够在保证路径质量的同时大幅提高计算效率。
在C++实现栅格地图、状态空间、状态校验以及RRT搜索算法方面,我们需要首先建立一个栅格地图模型,将环境划分为一系列网格单元,并将障碍物与可通行区域进行区分。状态空间是指车辆在栅格地图中可能出现的位置与转向角度的组合,可以通过定义一定的状态空间编码方式来进行表示。状态校验是在路径搜索过程中,对每个生成的状态进行验证,以确保生成的路径是合法的。最后,RRT搜索算法是一种以随机采样和连续状态转移为基础的路径搜索算法,可以通过在栅格地图中不断扩展搜索树来生成一条路径。
综上所述,全局规划算法在自动驾驶领域中具有重要意义。本文从RRT+Dubins规划、Hybrid A规划和混合A规划三个方面进行了详细介绍,并结合C++实现栅格地图、状态空间、状态校验以及RRT搜索算法进行了具体讲解。通过对这些关键技术的理解和应用,我们可以更好地实现自动驾驶系统的路径规划功能,为未来智能交通的发展贡献自己的力量。
以上相关代码,程序地址:http://wekup.cn/717795263487.html















 1158
1158

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









