




2020《FingerDraw: Sub-wavelength Level Finger Motion Tracking with WiFi Signals》读书笔记
本文基于基于感知微小运动的CSI商模型和指画分割与重建技术,实现误差为1.27cm的任意二维手势绘制。如图(1)所示:

FingerDraw
1. WiFi手势识别现状
WiFi手势识别大致可分为基于模式识别方法(如Mudra、Widar3.0)和基于运动追踪方法的两类(如Qgesture、GingerDraw)。
模式识别仅能识别预定义的手势集,不能进行任意的手指运动跟踪。
现有的基于运动追踪的方法有如下缺点:
① 受到原始CSI振幅中的噪声的影响,并且在提取的多普勒速度分布中呈现低信噪比,导致定位的粗粒度。用共轭相乘法有幅度噪声。
② 要求目标移动至少几个波长,以便正确提取运动信息。
2. 现有方法不能感知亚波长级手指运动的原因
2.1和2.2说明了为什么利用原始CSI信号和模式识别方法精确度不够
2.3说明QGesture的方法的缺陷
2.1 手指运动和CSI信号变化之间在菲涅耳区背景下的映射
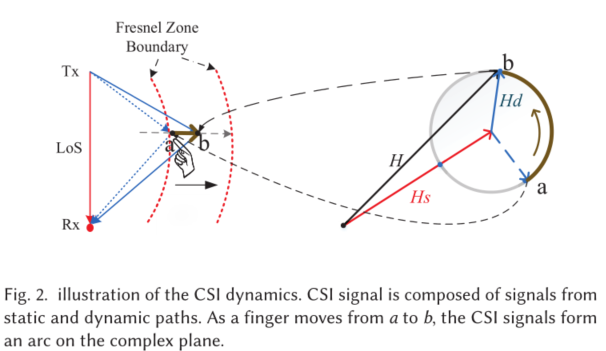
图2中,手指在一对WiFi收发器的感应范围内移动。接收信号强度是来自静态视线(LoS)传播和环境反射的所有路径分量以及手指的动态反射路径的叠加。波长 λ \lambda λ的信号,反射径长度变化 d d d,动态反射路径就会有 2 π d / λ 2 \pi d / \lambda 2πd/λ的相移。
CSI模型:
H ( f , t ) = H s ( f , t ) + H d ( f , t ) = H s ( f , t ) + A ( f , t ) e − j 2 π d ( t ) λ H(f, t)=H_{s}(f, t)+H_{d}(f, t)=H_{s}(f, t)+A(f, t) e^{-j 2 \pi \frac{d(t)}{\lambda}} H(f,t)=Hs(f,t)+Hd(f,t)=Hs(f,t)+A(f,t)e−j2πλd(t) 当手指移动时,反射路径改变其长度,动态相量 H d ( f , t ) H_{d}(f, t) Hd(f,t)分量相应旋转。如果反射路径的长度变化小于一个波长,则叠加的CSI沿圆弧变化。动态分量的旋转方向与手指的运动方向相关,能反映出反射路径的长度增加或减少。
当一个物体穿过一系列菲涅耳区时,接收信号显示出连续的类似正弦波的波形。如果由移动物体引起的反射路径长度变化短于一个波长,则接收信号只是正弦状波形的一个片段。
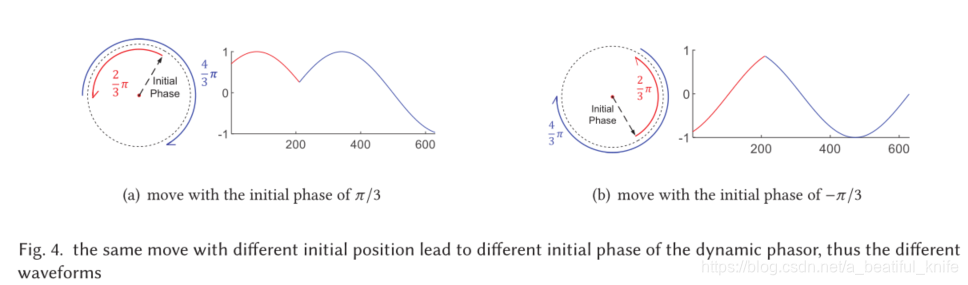
对于类似的手指运动,CSI波形图样可能会有所不同,这取决于手指在绘图时移动穿过多少个菲涅耳区,以及菲涅耳区中的初始位置。
2.2 实验验证相似手势CSI波形的巨大差异
控制变量法:图3(1)和图三(2)位置相同,字母d大小不同,图三(2)和图三(3)初始位置不同,字母d大小相同。
图四是理论仿真。

2.3 Qgesture方法的缺陷
2018《QGesture: Quantifying Gesture Distance and Direction with WiFi Signals.》
Qgesture中估计静态分量的方法是在滑动窗口上平均CSI数据,所以手势轨迹精度不够。
3. 基于CSI商的手势追踪
3.1 CSI商模型优点
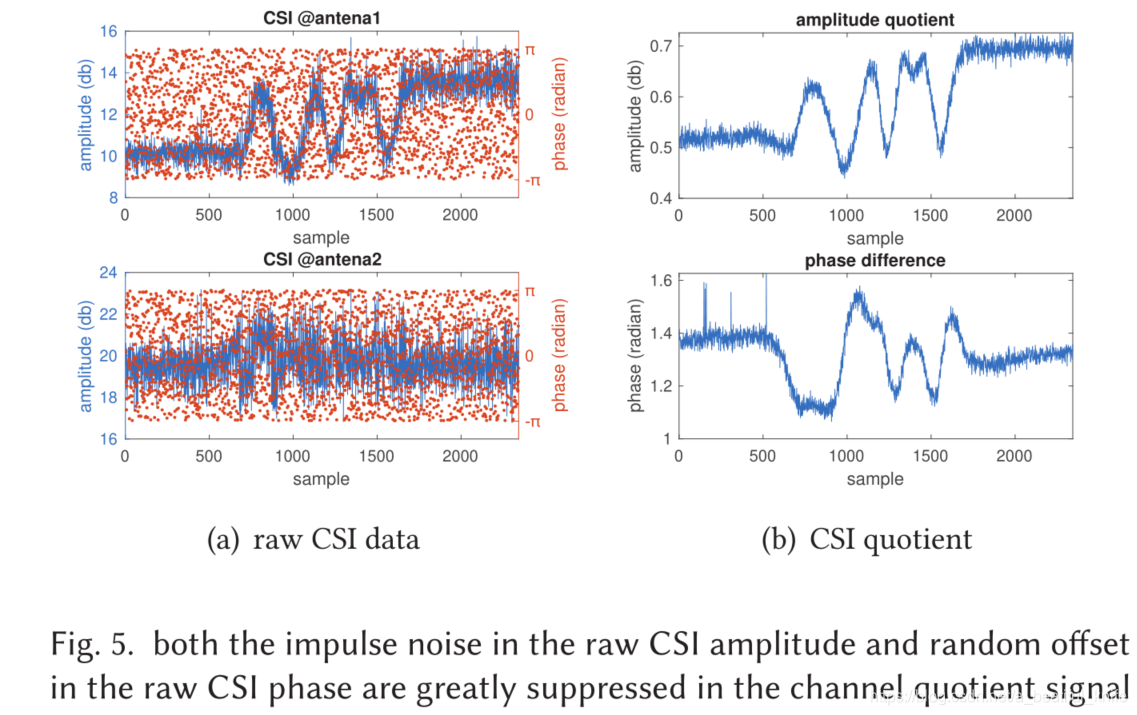
1)消除了原始CSI信号中的大部分噪声,更有利于监测微小的手指运动
2)提供了完全可用的复数值的相位和振幅信息,保持了运动位移和CSI信号之间的相关性(复平面的轨迹能反映运动特征)
图5显示了原始CSI和CSI商。在图5(a)中,CSI相位的样本(红点)随机分布在所有天线的[− π \pi π, π \pi π]中,并且观察到振幅中有严重脉冲噪声(蓝线)。CSI商中,幅度和相位上去除大部分噪声。
3.2 CSI商模型(和Farsense一模一样,就当复习)
假设两个固定位置有一对收发器和一个移动目标(如手指),如图(1)所示。LoS和反射环境静态物体的信号组合成静态信号分量,手指反射构成动态信号分量,CSI商的形式为:
H q ( f , t ) = A n o i s e ( f , t ) e − j θ o f f s e t ( f , t ) ( H s 1 ( f , t ) + H d 1 ( f , t ) ) A n o i s e ( f , t ) e − j θ o f f s e t ( f , t ) ( H s 2 ( f , t ) + H d 2 ( f , t ) ) = H s 1 ( f , t ) + H d 1 ( f , t ) H s 2 ( f , t ) + H d 2 ( f , t ) H_{q}(f, t)=\frac{A_{n o i s e}(f, t) e^{-j \theta_{o f f s e t}(f, t)}\left(H_{s 1}(f, t)+H_{d 1}(f, t)\right)}{A_{n o i s e}(f, t) e^{-j \theta_{o f f s e t}(f, t)}\left(H_{s 2}(f, t)+H_{d 2}(f, t)\right)}=\frac{H_{s 1}(f, t)+H_{d 1}(f, t)}{H_{s 2}(f, t)+H_{d 2}(f, t)} H
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2217
2217

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









